CARRO DE CONDUCCION AUTOMATICA PARA EL TRANSPORTE DE OBJETOS, EN PARTICULAR SOBRE CAMPOS DE GOLF.
Carro (10) para el transporte de objetos y bienes varios, en particular sobre campos de golf,
del tipo que comprende:
- como mínimo un motor eléctrico de tracción (19, 20) asociado a por lo menos una rueda (13, 14) de dicho carro, dicho motor está alimentado por un juego de baterías (17, 18) instaladas a bordo del carro (10) y está controlado por medio de un regulador electrónico de velocidad;
- como mínimo, tres sensores ultrasónicos separados (22, 28) distribuidos en dicho carro (10) y aptos para detectar las señales procedentes de una fuente de señales externa (23);
- una unidad microcomputadora de control (21) que interactúa con dichos sensores (22, 28) y con el mencionado regulador electrónico de velocidad para pilotar dicho, como mínimo, un motor eléctrico de tracción;
dicho carro está caracterizado por el hecho de que la mencionada unidad microcomputadora de control (21) es apta para determinar la posición de dicho carro en comparación con dicha fuente externa (23) mediante la elaboración de datos relativos a las señales detectadas por al menos dos de las mencionadas unidades sensoras (22)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2005/000027.
Solicitante: O.M.G. S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA DELLA TURA, S.N.,56030 CASCINE DI BUTI.
Inventor/es: SPIGAI,ALBERTO.
Fecha de Publicación: .
Fecha Concesión Europea: 5 de Mayo de 2010.
Clasificación Internacional de Patentes:
- G05D1/02E8
Clasificación PCT:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Fragmento de la descripción:
Carro de conducción automática para el transporte de objetos, en particular sobre campos de golf.
Campo técnico
La presente invención se refiere a un carro para el transporte de bienes y objetos, en particular sobre campos de golf.
Específicamente, la invención se refiere a los medios y modos de conducción automática de un carro para el transporte de objetos y bienes en una variedad de entornos.
Estado de la técnica
El uso de carros adecuados para el transporte automático de objetos y bienes se está difundiendo en varios sectores, gracias al desarrollo de las tecnologías necesarias para su realización.
Por ejemplo, en el documento US 2003/0030398 A1 se describe un método muy eficiente para utilizar un sistema robótico para comandarlo en la realización de funciones específicas dentro de un área mapeada. El sistema robótico reivindicado dispone de un rango completo de facilidades y dispositivos adecuados para permitirle llevar a cabo las funciones asignadas de un modo completamente automático, aun cuando, en realidad, la solicitud de patente no describe de una manera muy fiable la forma en que se implementan tales facilidades y dispositivos para completar las funciones requeridas. En todo caso, la complejidad de tal sistema robótico lo hace inadecuado para muchas aplicaciones en las que se desee una mayor simplicidad a fin de reducir efectivamente los costos globales del apara-to.
En el sector específico de los carros para transporte de objetos, el desarrollo de circuitos electrónicos basados en microcomputadores ha permitido diseñar algoritmos suficientemente complejos como para controlar adecuadamente los motores eléctricos, usualmente alimentados por baterías a bordo, y los medios de conducción del carro para lograr una conducción adecuada del carro en sí mismo hacia una fuente emisora de señal de referencia específica.
En una solicitud de patente previa, EP 1210260, presentada por el mismo solicitante, se describió y reivindicó, por ejemplo, un carro dedicado al transporte de palos de golf, accesorios y otros objetos sobre campos de golf; carro en el cual se incorporan grupos de sensores para detectar la posición de una fuente externa, portada por el jugador de golf, de señales ultrasónicas, y otros grupos de sensores dedicados a detectar obstáculos interpuestos a lo largo de la ruta del carro.
Las señales detectadas por dichos sensores se procesan en una unidad microcomputadora central que se relaciona con los sensores y con la unidad o unidades electrónicas de control de los motores, de acuerdo con un algoritmo adecuado para llevar el carro a las proximidades de la fuente de señal ultrasónica externa. Dicha unidad central microcomputadora controla las unidades de dirección y/o cada posible motor eléctrico de impulsión en función de qué sensor detectó la señal emitida por la fuente externa y también en función de la distancia entre el sensor y la fuente externa, medida por medio del tiempo transcurrido entre la emisión y la detección de las señales.
Sin duda, un carro así diseñado dispone de comportamientos de funcionamiento automático que son mucho mejores que los de carros previos basados en el uso de señales de radio como, por ejemplo, el carro reivindicado en el documento US-A-4.109.186, que incorpora receptores de señales electromagnéticas provenientes de una fuente conectada al usuario, estando dichos receptores instalados y adecuadamente separados sobre dicho carro. En este caso, la conducción del vehículo es muy dificultosa, porque se lleva a cabo por medio de las diferencias entre los niveles de energía de las señales recibidas por los receptores y, por lo tanto, estando los receptores muy cerca uno del otro, dichas diferencias no son suficientes para detectarlas y procesarlas de manera confiable.
Otro ejemplo de un carro conducido automáticamente, todavía en el sector de golf, basado en el uso de señales de radio, se describe en US-A-5.711.388, respecto de un carro robótico autodirigido capaz de almacenar mapas e instrucciones de navegación y también capaz de interactuar con un sistema de supervisión global para atender al jugador a lo largo del campo de golf. A pesar de que tenemos, respecto del caso anterior, ventajas colaterales, también en este caso, sin embargo, cuando el carro interactúa con el usuario, se presentan los mismos problemas de la solución previa, de acuerdo con el hecho de que, aun en este caso, la detección direccional de las señales de radio emitidas por un emisor transportado por el usuario es necesaria para determinar sus posiciones. En el documento US2004/260467 se describe un ejemplo diferente de un carro de conducción parcialmente automática, en el que la ubicación del carro de golf dentro del campo se determina por GPS, a efectos de evitar el acceso del mismo carro a áreas restringidas específicas. Cuando se detecta un acceso prohibido, se controla el carro automáticamente para disminuir su velocidad o detenerlo. Está claro que, en este caso, solamente se monitorean y controlan automáticamente unas pocas funciones de conducción.
En vista de lo anterior, la solución descrita en el documento de patente EP 1210260 es actualmente una solución muy fiable para conducir automáticamente un carro para el transporte de objetos, en particular sobre campos de golf.
De cualquier modo, presenta algunas limitaciones que dependen tan solo del lugar de uso, los campos de golf, donde funciona de modo casi completamente efectivo, mientras que, en caso de usarlo puertas adentro, pueden sobrevenir problemas con la detección de la señal fuente relacionados con posibles reflexiones de la propia señal.
Pueden sobrevenir limitaciones adicionales debido a la posición relativa del carro y la fuente externa, la cual está demasiado restringida en el carro anterior, y por posible interferencia con diferentes fuentes externas de señal pertenecientes a diferentes carros.
Resumen de la invención
El propósito de la presente invención es proponer un carro de conducción automática para transporte de objetos y otros elementos en diferentes entornos, tanto puertas adentro como en exteriores.
Un propósito adicional de la invención es proponer un carro para transporte automático de objetos y bienes varios, en el que es extremadamente fácil e inmediato definir y mantener cualquier posición mutua entre el carro y su fuente externa.
Otro propósito de la invención es proponer un carro para el transporte de objetos y bienes varios, particularmente adecuado para el uso en campos de golf.
Los mencionados propósitos y otros más se logran, de acuerdo con la reivindicación 1, por medio de un carro de ese tipo que incorpora:
- como mínimo un motor eléctrico de tracción asociado a por lo menos una rueda de dicho carro, dicho motor está alimentado por un juego de baterías instaladas a bordo del carro y está controlado por medio de un regulador electrónico de velocidad,
- una serie de sensores ultrasónicos aptos para detectar las señales provenientes de una fuente externa de señales;
- una unidad microcomputadora de control que se relaciona con dichos sensores y con dicho regulador electrónico de velocidad para pilotar el mencionado motor eléctrico de tracción como mínimo;
dicho carro está caracterizado por el hecho de que dicha serie de sensores incluye por lo menos tres unidades sensoras separadas distribuidas sobre dicho carro, y que dicha unidad microcomputadora de control es apta para determinar la posición de dicho carro en comparación con dicha fuente externa mediante el procesamiento de datos relativos a las señales detectadas por al menos dos de dichas unidades sensoras, ejecutando, en concreto, el cálculo trigonométrico de la posición de dicha fuente en comparación con dichas unidades sensoras.
Las unidades sensoras arriba mencionadas están conformadas y ubicadas en una posición tal para monitorizar cada punto del área que rodea el carro. Para un carro con una planta de forma rectangular, cada una de las unidades mencionadas se compone de parejas de sensores adyacentes entre sí en direcciones perpendiculares entre ellos, preferiblemente en número de cuatro, ubicados en cada una de las cuatro esquinas del carro; el cálculo trigonométrico de la posición del carro en comparación con la fuente externa se efectúa procesando los datos relativos a las señales detectadas por tres de dichas unidades sensoras. En el algoritmo de elaboración se rechazan, particularmente, posibles cálculos erróneos debidos a reflexiones de la señal de referencia...
Reivindicaciones:
1. Carro (10) para el transporte de objetos y bienes varios, en particular sobre campos de golf, del tipo que comprende:
dicho carro está caracterizado por el hecho de que la mencionada unidad microcomputadora de control (21) es apta para determinar la posición de dicho carro en comparación con dicha fuente externa (23) mediante la elaboración de datos relativos a las señales detectadas por al menos dos de las mencionadas unidades sensoras (22).
2. Carro de acuerdo con la reivindicación precedente, caracterizado por el hecho de que dicha unidad microcomputadora de control es apta para determinar la posición de dicho carro respecto de la mencionada fuente externa mediante el cálculo trigonométrico de dicha posición, efectuado utilizando las magnitudes de las distancias de dichas unidades de sensores con respecto a la mencionada fuente, estimándose dichas magnitudes mediante medición del tiempo intercalado entre el momento de activación de dicha fuente externa y el momento de la recepción, por las mencionadas unidades de sensor, de las señales ultrasónicas emitidas por dicha fuente como consecuencia de la mencionada activación.
3. Carro de acuerdo con la reivindicación 1, caracterizado porque dicho carro presenta una planta de forma sustancialmente rectangular, y las mencionadas unidades de sensor son en número de cuatro, ubicadas en cada una de las cuatro esquinas de dicho carro.
4. Carro, de acuerdo con la reivindicación precedente, caracterizado porque cada una de las mencionadas unidades de sensor se compone de parejas de sensores situados adyacentes entre sí en direcciones perpendiculares entre ellos.
5. Carro de acuerdo con la reivindicación 2, caracterizado porque el cálculo trigonométrico de la posición del carro con respecto a la fuente externa se efectúa mediante el procesamiento de las magnitudes de las distancias de tres de las mencionadas unidades de sensores respecto de dicha fuente.
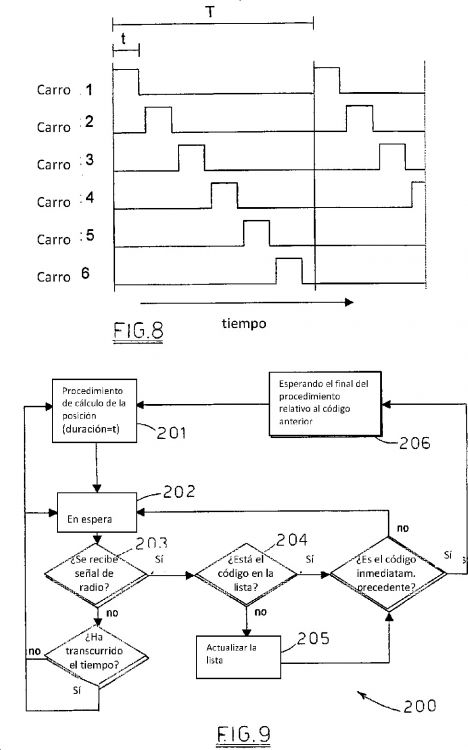
6. Carro de acuerdo con la reivindicación 2, caracterizado porque la mencionada unidad microcomputadora de control es apta para determinar la posición del carro respecto de la mencionada fuente mediante un algoritmo, en el cual:
7. Carro de acuerdo con la reivindicación precedente, caracterizado porque dicha verificación de congruencia se realiza en función de la distancia entre la mencionada posición calculada y la posición previamente determinada, y también, en función del tiempo interpuesto entre los dos procedimientos realizados para determinar dichas posicio-nes.
8. Carro de acuerdo con la reivindicación 2, caracterizado porque la mencionada unidad microcomputadora de control es apta para determinar la posición de dicho carro respecto de la mencionada fuente externa, de acuerdo con un algoritmo que es útil para evitar la interferencia con otros carros que operen en la misma área, dicho algoritmo contempla la ejecución por separado de procedimientos para determinar las posiciones de los diferentes carros con respecto a las fuentes externas relacionadas, según una jerarquía preestablecida.
9. Carro, de acuerdo con la reivindicación precedente, caracterizado porque el mencionado algoritmo contempla que:
10. Carro para el transporte de objetos y bienes varios, en particular sobre campos de golf, sustancialmente como se describe y se muestra en las ilustraciones adjuntas y para los propósitos especificados.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]