APARATO PARA UN VEHICULO ESPACIAL GEOSINCRONO PARA EXTENSION DE LA VIDA UTIL.
Vehículo (26) espacial para extensión de la vida útil de satélites,
que comprende:
un instrumento (14) mecánico adaptado para su conexión a un vehículo (25) espacial principal, teniendo el vehículo (25) espacial principal un centro (70a) de masa de vehículo espacial principal y un punto de conexión configurado para alojar el instrumento (14) mecánico;
un dispositivo (16) de extensión de barquillas de propulsores;
una primera barquilla (13) de propulsores y una segunda barquilla (17) de propulsores fijadas al dispositivo (16) de extensión de barquillas de propulsores, comprendiendo la primera barquilla (13) de propulsores un primer propulsor (19); y
una lógica configurada para guiar el vehículo (26) espacial para extensión de la vida útil de satélites hacia el vehículo (25) espacial principal, y atracar el vehículo (26) espacial para extensión de la vida útil de satélites en el vehículo (25) espacial principal para crear un vehículo (30) espacial combinado fijando el instrumento (14) mecánico al punto de conexión en el vehículo (25) espacial principal;
caracterizado porque el primer propulsor está fijado de manera rotatoria a la primera barquilla (13) de propulso- res;
y la lógica está configurada además para calcular un centro (70b) de masa de vehículo espacial combinado del vehículo (30) espacial combinado y para calcular un valor de rotación angular para encender el primer propulsor (19) basándose en el centro (70b) de masa de vehículo espacial combinado calculado
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/026398.
Solicitante: SKYCORP., INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 603 DEMENT STREET,HUNTSVILLE, AL 35801.
Inventor/es: WINGO,DENNIS,RAY.
Fecha de Publicación: .
Fecha Concesión Europea: 2 de Junio de 2010.
Clasificación Internacional de Patentes:
- B64G1/10E
- B64G1/26 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › que utilizan chorros.
- B64G1/64C
Clasificación PCT:
- B64G1/10 B64G 1/00 […] › Satélites artificiales; Sus sistemas; Vehículos interplanetarios (transbordadores espaciales B64G 1/14; sistemas de radiotransmisión que utilizan satélites H04B 7/185).
- B64G1/26 B64G 1/00 […] › que utilizan chorros.
- B64G1/40 B64G 1/00 […] › Disposiciones o adaptaciones de los grupos propulsores (B64G 1/26 tiene prioridad; grupos propulsores en sí , ver las subclases apropiadas, p. ej. F02K, F03H).
- B64G1/64 B64G 1/00 […] › Sistemas para acoplar o separar vehículos espaciales o partes de ellos, p. ej. disposiciones para el atraque.
Clasificación antigua:
- B64G1/62 B64G 1/00 […] › Sistemas para la reentrada en la atmósfera terrestre; Dispositivos de desaceleración o de aterrizaje.
Fragmento de la descripción:
Aparato para un vehículo espacial geosíncrono para extensión de la vida útil.
En el campo de los vuelos espaciales, se han usado sistemas tripulados y no tripulados para el atraque en, y la extensión de la vida útil, el control o la eliminación de, otro vehículo espacial, por ejemplo, satélites. A este respecto, un "módulo de mando/servicio Apollo" atracó en y modificó la órbita de un módulo lunar, el cohete no tripulado "Atlas/Agena" atracó en el "Gemini X", "XI" y "XII" y modificó la órbita del sistema acoplado, y "Progress" atracó en, impulsó y posteriormente desorbitó de manera segura la estación espacial rusa Mir. Además, Progress atraca en y mantiene la órbita de la Estación Espacial Internacional (ISS) de la Administración Nacional de Aeronáutica y del Espacio/Agencia Espacial Europea/Rusa (NASA/ESA/Rusa).
Se han diseñado otros sistemas para proporcionar capacidades de repotenciación. Por ejemplo, la NASA diseñó un vehículo de maniobra orbital en 1986 que estaba diseñado para repotenciar el telescopio espacial Hubble, el observatorio de rayos gamma y otros tipos de carga útil de empresas privadas y del gobierno. Además, la ESA está construyendo actualmente el vehículo de transferencia automatizado (ATV), para entregar suministros y realizar la repotenciación de la ISS. Recientemente se han llevado a cabo o están en curso otros esfuerzos para el encuentro y o atraque de vehículos espaciales diferentes. La agencia espacial alemana, Deutschen Zentrum für Luft- und Raumfahrt (DLR) y la Agencia Nacional de Desarrollo Espacial de Japón (NASDA) realizaron un experimento de atraque en órbita en 1998 denominado ETS-VII (GETEX) que demostró muchos conceptos relacionados con las operaciones de proximidad de múltiples vehículos espaciales así como el atraque robótico. También abordaron el asunto del diseño de sistemas en cuanto a la cantidad de movimiento impartida a un sistema de vehículos espaciales combinados mediante el uso de brazos robóticos. La Agencia de Investigación de Proyectos Avanzados de Defensa (DARPA) está financiando actualmente la misión Orbital Express así como la misión de encuentro "Demonstration of Autonomous Rendezvous Technology" (DART). Sin embargo, ninguna de estas misiones está dirigida a vehículos espaciales en órbita geoestacionaria.
Normalmente, la vida útil de un vehículo espacial en órbita geoestacionaria terrestre (GEO) está por encima de los 15 años y está limitada principalmente por el agotamiento del combustible de mantenimiento de la órbita. Este combustible es necesario para mantener la posición del vehículo espacial por encima del ecuador terrestre en una altitud orbital de aproximadamente 35.800 kilómetros. La posición orbital de un vehículo espacial GEO se ve influenciada fundamentalmente por las diferentes fuerzas gravitacionales ejercidas por la Tierra, la Luna y el Sol, denominadas conjuntamente "fuerzas gravitacionales" a continuación en el presente documento. Tales fuerzas gravitacionales dan como resultado una desviación del vehículo espacial respecto a la posición orbital deseada, denominada "desviación del vehículo espacial" a continuación en el presente documento. La desviación del vehículo espacial es inaceptable para la provisión de servicios desde estas ubicaciones y normalmente se desea minimizar tal desviación.
La desviación del vehículo espacial se presenta de dos formas, es decir, desviación de semieje mayor y desviación en inclinación. La desviación del vehículo espacial de semieje mayor da como resultado una desviación este/oeste respecto a la posición orbital deseada y se denominada "desviación este/oeste" a continuación en el presente documento. La desviación del vehículo espacial en inclinación da como resultado un desplazamiento del vehículo espacial que es ortogonal con respecto al semieje mayor de la órbita del vehículo espacial. La desviación del vehículo espacial en inclinación requiere aproximadamente diez veces más energía para su corrección que la desviación del vehículo espacial de semieje mayor. La desviación en inclinación se denomina "desviación norte/sur" a continuación en el presente documento. Normalmente tanto la desviación este/oeste como norte/sur se corrigen mediante un equipo de propulsores de vehículo espacial.
En la jerga técnica ha de tenerse en cuenta que órbita geosíncrona se refiere a una órbita, mediante la cual la velocidad orbital de un vehículo espacial es equivalente a la velocidad de rotación de la Tierra. "Órbita geoestacionaria" (GEO) es un término que se refiere a una órbita con cero grados de inclinación alrededor de la Tierra que tiene un periodo de aproximadamente 24 horas, es decir, un vehículo espacial en órbita GEO parece que está suspendido inmóvil con respecto a la posición de una persona en la Tierra. Por tanto, un satélite en órbita GEO viaja a una velocidad igual a la de la rotación de la Tierra con el fin de permanecer en una posición relativamente fija con respecto a la Tierra. Con el fin de permanecer en el plano ecuatorial (cero grados o Cinturón de Clarke) así como a una altitud deseada (a 80 km), normalmente se emplea un sistema de propulsión.
Es relativamente simple en términos de energía compensar la desviación este/oeste encendiendo propulsores a lo largo del vector de velocidad o hacia el nadir/cenit, debido a que la desviación este/oeste es una variación en la excentricidad o el periodo de la órbita. Sin embargo, es más difícil compensar la desviación norte/sur descrita en el presente documento.
Obsérvese que la desviación norte/sur y este/oeste con respecto a la posición de una vehículo espacial geoestacionario están completamente aisladas de cualquier perturbación de la actitud del vehículo espacial que se deba a un momento por gradiente de gravedad, un momento solar o un momento por desplazamiento mecánico interno debido al movimiento de componentes o al agotamiento del combustible en los tanques internos. Normalmente, tales desplazamientos de la actitud se compensan mediante el uso del sistema de propulsión y los propulsores descritos anteriormente y/o dispositivos de manejo de la cantidad de movimiento. El documento US-A-4880187 da a conocer un vehículo espacial modular multiuso que puede adaptarse rápida y fácilmente para realizar una variedad de misiones espaciales de corto y largo alcance, tales como misiones de mantenimiento en órbita y similares. El vehículo espacial modular multiuso comprende un vehículo espacial de corto alcance completamente integrado que incluye uno o más equipos de propulsión modulares relativamente pequeños que proporcionan capacidad de propulsión para misiones de relativamente corto alcance y requisitos de maniobra a corta distancia. La capacidad de propulsión de mayor alcance se proporciona mediante un módulo de propulsión más grande en comparación diseñado para un montaje anidado desmontable dentro de una cámara con un lado abierto en el vehículo de corto alcance. Mecanismos de cerrojo relativamente simples y de fácil funcionamiento mantienen los equipos de propulsión y el módulo de propulsión en el vehículo espacial de corto alcance en posiciones preseleccionadas con instalaciones eléctricas relativamente simples conectadas entre sí para proporcionar una interfaz de control con el vehículo espacial de corto alcance. Los equipos de propulsión y/o el módulo de propulsión pueden reemplazarse o retirarse según se requiera para reabastecer con combustible el vehículo espacial modular o adaptar el vehículo espacial para una misión espacial particular. Un vehículo espacial modular multiuso puede adaptarse rápida y fácilmente para realizar una variedad de misiones espaciales de corto y largo alcance, tales como misiones de mantenimiento en órbita y similares. El vehículo espacial modular multiuso comprende un vehículo espacial de corto alcance completamente integrado que incluye uno o más equipos de propulsión modulares relativamente pequeños que proporcionan capacidad de propulsión para misiones de relativamente corto alcance y requisitos de maniobra a corta distancia. La capacidad de propulsión de mayor alcance se proporciona mediante un módulo de propulsión más grande en comparación diseñado para un montaje anidado desmontable dentro de una cámara con un lado abierto en el vehículo de corto alcance. Mecanismos de cerrojo relativamente simples y de fácil funcionamiento mantienen los equipos de propulsión y el módulo de propulsión en el vehículo espacial de corto alcance en posiciones seleccionadas previamente con instalaciones eléctricas relativamente simples conectadas entre sí para proporcionar una interfaz de control con el vehículo espacial de corto...
Reivindicaciones:
1. Vehículo (26) espacial para extensión de la vida útil de satélites, que comprende:
un instrumento (14) mecánico adaptado para su conexión a un vehículo (25) espacial principal, teniendo el vehículo (25) espacial principal un centro (70a) de masa de vehículo espacial principal y un punto de conexión configurado para alojar el instrumento (14) mecánico;
un dispositivo (16) de extensión de barquillas de propulsores;
una primera barquilla (13) de propulsores y una segunda barquilla (17) de propulsores fijadas al dispositivo (16) de extensión de barquillas de propulsores, comprendiendo la primera barquilla (13) de propulsores un primer propulsor (19); y
una lógica configurada para guiar el vehículo (26) espacial para extensión de la vida útil de satélites hacia el vehículo (25) espacial principal, y atracar el vehículo (26) espacial para extensión de la vida útil de satélites en el vehículo (25) espacial principal para crear un vehículo (30) espacial combinado fijando el instrumento (14) mecánico al punto de conexión en el vehículo (25) espacial principal;
caracterizado porque el primer propulsor está fijado de manera rotatoria a la primera barquilla (13) de propulso- res;
y la lógica está configurada además para calcular un centro (70b) de masa de vehículo espacial combinado del vehículo (30) espacial combinado y para calcular un valor de rotación angular para encender el primer propulsor (19) basándose en el centro (70b) de masa de vehículo espacial combinado calculado.
2. Vehículo espacial según la reivindicación 1, en el que la segunda barquilla de propulsores comprende un segundo propulsor fijado de manera rotatoria a la segunda barquilla (17) de propulsores, estando adaptado cada uno de los propulsores primero y segundo para su rotación alrededor de un eje de rotación.
3. Vehículo espacial según la reivindicación 2, en el que la lógica está configurada además para calcular dinámicamente el centro (70b) de masa de vehículo espacial combinado del vehículo (30) espacial combinado cuando el instrumento (14) mecánico se acopla al punto de conexión.
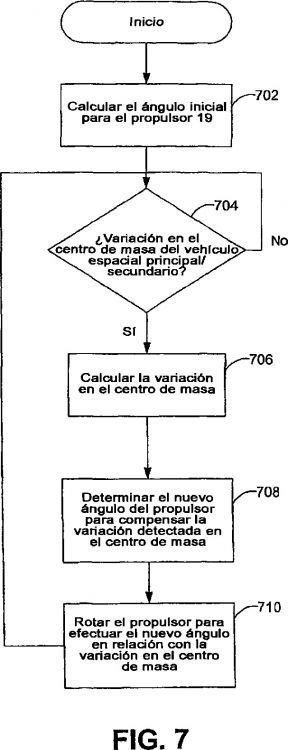
4. Vehículo espacial según la reivindicación 3, en el que la lógica está configurada además para calcular un primer ángulo de rotación alrededor del eje de rotación correspondiente al centro (70b) de masa de vehículo espacial combinado calculado.
5. Vehículo espacial según la reivindicación 4, en el que la lógica está configurada además para detectar una variación en el centro (70b) de masa de vehículo espacial combinado y calcular un segundo ángulo de rotación alrededor del eje de rotación correspondiente a la variación en el centro (70b) de masa de vehículo espacial combinado.
6. Vehículo espacial según la reivindicación 1, en el que la segunda barquilla (17) de propulsores comprende un segundo propulsor que está unido de manera rígida a la segunda barquilla de propulsores.
7. Método de posicionamiento de satélite, comprendiendo el método las etapas de:
posicionar un primer vehículo (26) espacial a una distancia de atraque de un segundo vehículo (25) espacial, teniendo el segundo vehículo (25) espacial un primer centro (70a) de masa;
guiar el primer vehículo (26) espacial hacia el segundo vehículo (25) espacial;
fijar el primer vehículo (26) espacial al segundo vehículo (25) espacial para obtener un vehículo (30) espacial combinado;
calcular un centro (70b) de masa de vehículo espacial combinado, reflejando el centro (70b) de masa de vehículo espacial combinado una variación respecto al primer centro (70a) de masa;
calcular un ángulo de rotación de un propulsor (19) cardaneado alrededor de una suspensión (32) cardán en relación con el centro (70b) de masa de vehículo espacial combinado calculado; y
variar el ángulo de rotación del propulsor (19) cardaneado para reflejar una variación del primer centro (70a) de masa con respecto al centro (70b) de masa de vehículo espacial combinado.
8. Método según la reivindicación 7, que comprende además las etapas de:
calcular una primera dirección de encendido y una primera magnitud de fuerza para un propulsor (22) fijo; y
calcular una segunda dirección de encendido y una segunda magnitud de fuerza para el propulsor (19) cardaneado.
9. Método según la reivindicación 8, en el que el cálculo de la primera dirección de encendido y el cálculo de la segunda dirección de encendido se basan en el centro (70b) de masa de vehículo espacial combinado calculado.
10. Sistema, que comprende:
un vehículo (25) espacial principal que comprende un dispositivo de conexión, teniendo el vehículo (25) espacial principal un primer centro (70a) de masa;
un vehículo (26) espacial para extensión de la vida útil de satélites según la reivindicación 1.
11. Sistema según la reivindicación 10, en el que la primera barquilla (13) de propulsores está fijada a un larguero (16) extensible configurado para extenderse con el fin de compensar diversos tamaños de vehículo espacial principal.
12. Sistema según la reivindicación 11, en el que el vehículo (26) espacial para extensión de la vida útil de satélites comprende una pluralidad de propulsores y barquillas de propulsores correspondientes, pudiendo ponerse cada propulsor en rotación por el controlador (40) con el fin de compensar el segundo centro (70b) de masa cuando el controlador (40) conecta el vehículo (26) espacial para extensión de la vida útil de satélites al vehículo (25) espacial principal.
13. Sistema según la reivindicación 10, en el que el vehículo (26) espacial para extensión de la vida útil de satélites está configurado para determinar el primer centro (70a) de masa del vehículo (25) espacial principal.
14. Sistema según la reivindicación 13, en el que el vehículo (26) espacial para extensión de la vida útil de satélites está configurado para determinar el segundo centro (70b) de masa basándose en el primer centro (70a) de masa del vehículo (25) espacial principal.
15. Sistema según la reivindicación 14, en el que el vehículo (26) espacial para extensión de la vida útil de satélites comprende además un larguero (16) extensible que tiene un primer extremo y un segundo extremo.
16. Sistema según la reivindicación 15, en el que el larguero (16) extensible está conectado a la primera barquilla (13) de propulsores en el primer extremo y a la segunda barquilla de propulsores en el segundo extremo, en el que la segunda barquilla de propulsores comprende un segundo propulsor fijado de manera rotatoria a la segunda barquilla (17) de propulsores.
17. Sistema según la reivindicación 16, en el que el controlador (40) calcula un primer ángulo correspondiente al primer propulsor (19) rotatorio y un segundo ángulo correspondiente al segundo propulsor rotatorio, calculándose los ángulos primero y segundo de manera que cada propulsor rotatorio se enciende a través del segundo centro (70b) de masa.
18. Sistema según la reivindicación 17, en el que el controlador (40) recalcula periódicamente el ángulo primero y segundo de los propulsores rotatorios primero (19) y segundo con el fin de corregir una variación en el segundo centro (70b) de masa basándose en el consumo del combustible.
Patentes similares o relacionadas:
Dispositivo para desplazar o retirar satélites artificiales, del 23 de Octubre de 2019, de D-Orbit SpA: Dispositivo para acoplarse a un satélite espacial (20', 20") antes del lanzamiento para retirar dicho satélite del espacio o desplazar […]
 Diseño eficiente de mantenimiento de estaciones para sistemas de combustible mixto en respuesta a la falla de un propulsor eléctrico, del 31 de Julio de 2019, de THE BOEING COMPANY: Un aparato que comprende:
un satélite ; y un controlador de órbita configurado para controlar las maniobras de mantenimiento de la estación del satélite , […]
Diseño eficiente de mantenimiento de estaciones para sistemas de combustible mixto en respuesta a la falla de un propulsor eléctrico, del 31 de Julio de 2019, de THE BOEING COMPANY: Un aparato que comprende:
un satélite ; y un controlador de órbita configurado para controlar las maniobras de mantenimiento de la estación del satélite , […]
Dispositivo y procedimiento para sacar de órbita un satélite, del 23 de Mayo de 2018, de THALES: Un dispositivo para sacar de órbita un satélite en modo de supervivencia que comprende: - un módulo de adquisición de datos adecuado para […]
Maniobras de adquisición de una nave espacial usando un control sin giroscopio basado en la posición, del 4 de Octubre de 2017, de THE BOEING COMPANY: Un sistema para un control sin giroscopio de la actitud de una nave espacial basándose en mediciones de actitud y no mediciones del ritmo de cambio, caracterizado por […]
Procedimiento y dispositivo de optimización de la masa de un satélite, del 19 de Octubre de 2016, de THALES: Procedimiento para la optimización de la masa de un satélite destinado a una misión que consta de una fase de órbita alrededor de un cuerpo macizo a lo largo de […]
Satélite con medios de propulsión eléctricos, procedimiento de puesta en posición de tal satélite y procedimiento de mantenimiento en posición del citado satélite, del 18 de Agosto de 2016, de Airbus Defence and Space SAS: Satélite destinado a ser puesto en posición en una órbita de misión alrededor de un cuerpo celeste, que comprende una cara denominada Tierra […]
Conjunto de apunte de un instrumento, del 20 de Julio de 2016, de THALES: Conjunto de apunte que comprende un instrumento y un dispositivo de apunte , comprendiendo el dispositivo de apunte : - un bastidor , […]
 METODO PARA MANIOBRAR UN SATELITE GEOESTACIONARIO Y SISTEMA DE CONTROL DE SATELITE PARA IMPLEMENTAR DICHO METODO, del 14 de Enero de 2010, de EUTELSAT: Un método para maniobrar un satélite geoestacionario con subsistemas de propulsión empleando la reacción química de un monopropelente o de un […]
METODO PARA MANIOBRAR UN SATELITE GEOESTACIONARIO Y SISTEMA DE CONTROL DE SATELITE PARA IMPLEMENTAR DICHO METODO, del 14 de Enero de 2010, de EUTELSAT: Un método para maniobrar un satélite geoestacionario con subsistemas de propulsión empleando la reacción química de un monopropelente o de un […]