Dispositivo de recuperación y frenado de objetos que vuelan libremente en el espacio.
Dispositivo de recuperación y frenado de objetos que vuelan libremente en el espacio,
en particular para capturarsatélites y otros objetos en órbita, compuesto de un vehículo espacial que se usa como vehículo portador dirigible,equipado con al menos un propulsor de control de la posición de vuelo, y en el que está dispuesta al menos unaunidad de captura que está unida al vehículo espacial y ha de ser lanzada desde el mismo, así como que se puedeseparar del vehículo espacial y está equipada con al menos una carga propulsora propia y un dispositivo de captura,caracterizado por que cada unidad de captura (2) está unida de manera separable mediante una cuerda (5) a lared de captura (4) y por que la carga propulsora está equipada con al menos una tobera de empuje (3) configuradacomo dispositivo de frenado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12000561.
Solicitante: ASTRIUM GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Robert-Koch-Str. 1 82024 Taufkirchen ALEMANIA.
Inventor/es: STARKE,JÜRGEN, BRÜGE,UWE, BISCHOF,BERNHARD, SOMMER,JOSEF, DUMKE,MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64G1/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › Satélites artificiales; Sus sistemas; Vehículos interplanetarios (transbordadores espaciales B64G 1/14; sistemas de radiotransmisión que utilizan satélites H04B 7/185).
- B64G1/62 B64G 1/00 […] › Sistemas para la reentrada en la atmósfera terrestre; Dispositivos de desaceleración o de aterrizaje.
- B64G1/64 B64G 1/00 […] › Sistemas para acoplar o separar vehículos espaciales o partes de ellos, p. ej. disposiciones para el atraque.
PDF original: ES-2438723_T3.pdf
Fragmento de la descripción:
Dispositivo de recuperación y frenado de objetos que vuelan libremente en el espacio La invención se refiere a un dispositivo de recuperación y frenado de objetos que vuelan libremente en el espacio, en particular para capturar satélites y otros objetos en órbita, compuesto de un vehículo espacial que se usa como vehículo portador dirigible, equipado con al menos un propulsor de control de la posición de vuelo, y en el que está dispuesta al menos una unidad de captura que está unida al vehículo espacial y que ha de ser lanzada desde el mismo, así como que se puede separar del vehículo espacial y está equipada con al menos una carga propulsora propia y un dispositivo de captura en forma de una red de captura posible de cerrar.
Los dispositivos de este tipo tienen la función de capturar objetos concretos que vuelan libremente en el espacio, por ejemplo, un satélite, la etapa superior de un cohete o cualquier otro tipo de basura espacial. Tales dispositivos se activan en general desde a bordo de una plataforma orbital en el espacio. Así, por ejemplo, el documento 15 DE10342954B4, considerado el estado de la técnica más actual, da a conocer un dispositivo del tipo mencionado al inicio, en el que está prevista una red de captura que presenta pesos en su borde exterior. Cuando la red es lanzada desde un dispositivo de disparo dispuesto en la estación orbital, lleva un impulso tal que se abre automáticamente a continuación debido a la inercia que actúa sobre los pesos. Con este fin se han dado a conocer además sistemas robóticos o dispositivos de sujeción mecánicos que están dispuestos en un sistema que vuela libremente y que, por
su parte, está unido a una plataforma orbital. Un dispositivo de este tipo se describe, por ejemplo, en el documento DE10342953B4.
Del documento JP7251799A es conocido también un dispositivo del tipo mencionado al inicio, mediante el que se capturan elementos orbitales o debris (desechos) , se transportan al vehículo portador y se alojan aquí. El sistema,
formado por un vehículo portador y varias unidades de captura, permanece en órbita con los desechos capturados o regresa con los mismos a la estación espacial, desde la que fue lanzado.
Es objetivo de la presente invención configurar un dispositivo de este tipo que posibilite de manera simple y fiable el regreso a la Tierra de los objetos capturados por el dispositivo.
La invención consigue este objetivo al prever en un dispositivo de este tipo que cada unidad de captura esté unida de manera separable mediante una cuerda a la red de captura y al estar equipada la carga propulsora con al menos una tobera de empuje configurada como dispositivo de frenado.
Después de realizar el dispositivo de recuperación según la invención una maniobra de captura, una unidad de captura desacoplada es capaz de obligar, mediante una unión flexible, a un cuerpo cercano a la Tierra, de gran masa y no cooperativo, por ejemplo, un satélite, una etapa superior de un cohete o un fragmento grande, a reentrar en la atmósfera terrestre con una zona de destino definida sobre la superficie terrestre. Teniendo en cuenta el comportamiento del sistema de los objetos acoplados de manera flexible, se garantiza también una estabilidad de la posición y una exactitud suficientes cuando actúa una fuerza de tracción, sin necesidad de un control activo de la posición.
La invención posibilita la reentrada específica de la respectiva unidad de captura y del objeto capturado con ella con la menor complejidad posible, usándose una unidad de captura de este tipo sólo para una maniobra y previéndose 45 varias unidades de captura de este tipo en un dispositivo de recuperación para lograr una misión general eficiente. El ahorro de masa como resultado de la eliminación de subsistemas no imprescindibles en las unidades de captura individuales y su concentración en el vehículo portador influyen positivamente en el cómputo de masa de la misión general y esto posibilita el ahorro de costes en la construcción de todo el dispositivo de recuperación.
Por tanto, la invención permite eliminar de manera segura y fiable del entorno espacial satélites y otros objetos orbitales que no pueden por sí mismos forzar su propia reentrada. Esto posibilita precisamente en órbitas muy frecuentadas para la observación de la Tierra una reducción evidente del peligro potencial de colisiones y aumenta así la seguridad de la navegación espacial en general.
Además, los movimientos del objeto de recuperación resultan irrelevantes de manera limitada para el funcionamiento del dispositivo de recuperación según la invención. La configuración de la tobera de empuje, prevista según la invención, como dispositivo de frenado permite también mantener en todo momento una distancia segura entre el objeto de recuperación y el dispositivo de recuperación. Por último, varias unidades de captura pueden estar agrupadas para formar una conexión en serie o en paralelo.
La invención se explica detalladamente a continuación por medio de ejemplos de realización representados en el dibujo. Muestran:
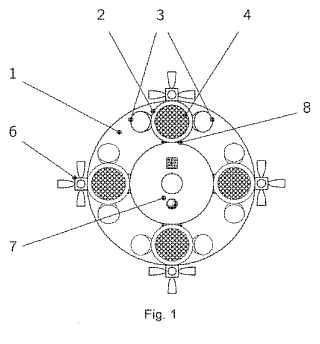
Fig. 1 una representación esquemática de la construcción de un dispositivo de recuperación en una vista 65 frontal;
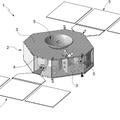
Fig. 2 una representación esquemática de una misión del dispositivo de recuperación según la figura 1;
Fig. 3 y 4 distintas fases de una maniobra de captura con el dispositivo de recuperación según la figura 1;
Fig. 5 una vista general de un sistema compuesto por una unidad de captura y un objeto capturado; y
Fig. 6 posibles alturas de órbita de un sistema compuesto por una unidad de captura y un objeto capturado, que provocarían una reentrada directa.
La figura 1 muestra esquemáticamente una vista frontal del dispositivo de recuperación que está compuesto de un vehículo portador 1, en el que están fijadas unidades de captura separables 2. Las unidades de captura separables contienen en cada caso una carga propulsora y están equipadas con toberas de empuje 3. En el ejemplo de realización representado aquí, cada unidad de captura 2 presenta una red 4, plegada primero, que se despliega tras ser expulsada de la unidad de captura 2 y que después permanece acoplada a la unidad de captura 2 mediante una 15 cuerda 5 no visible en esta figura. El vehículo portador 1, en el que están dispuestas las unidades de captura 2, está provisto de propulsores de control de la posición de vuelo que son 4 en el ejemplo de realización descrito aquí y que están distribuidos en la periferia, así como de una unidad de navegación 7. Las unidades de captura 2 están montadas de manera separable en el vehículo portador 1 mediante sujeciones 8 configuradas como bridas de unión.
La figura 2 muestra de manera esquemática un ejemplo de misión del dispositivo de recuperación descrito antes, es decir, la captura de un objeto 9 que se mueve sin control en el espacio. La misión comienza con una maniobra del vehículo portador 1 que, gracias a los propulsores de control de la posición de vuelo 6 y la unidad de navegación 7, tiene todos los sistemas necesarios para controlar activamente su posición a fin de realizar las maniobras necesarias para dirigirse hacia objetos 9 en órbita y seguirlos.
Tan pronto el vehículo portador 1 se acerca al objeto 9, que se va a capturar, con la ayuda de su unidad de navegación 7 óptica, apoyada por láser o radar, éste se mantiene a una distancia prefijada de este objeto 9. La maniobra de captura siguiente está representada detalladamente en las figuras 3 y 4. Para ejecutar esta maniobra, la unidad de captura 2 prevista para la realización debe ser transportada primero, dado el caso, hasta el borde delantero del vehículo portador 1 con el fin tener en cuenta el ángulo de abertura del lanzamiento de la red.
La unidad de captura alineada 2 del vehículo portador 1 expulsa ahora la red 4, situada en la misma, que se coloca alrededor del objeto 9 que se va a capturar y que se cierra automáticamente a continuación en el lado opuesto. La red 4 permanece unida al vehículo portador 1 o a la unidad de captura 2, sujetada aún a éste inicialmente, mediante la cuerda 5. Con ayuda de la unión flexible entre el objeto 9 y la unidad de captura 2, el objeto 9 se estabiliza y se alinea para la maniobra de frenado en contra de la dirección de vuelo al tensar o distender el vehículo portador 1 la cuerda 5 en el momento correcto mediante los impulsos de empuje de los propulsores de control de la posición de vuelo 6.
En el caso óptimo, la unidad de captura 2 y el objeto 9, que se va a capturar, se sitúan en una posición horizontal estable al final de la maniobra. La unidad de captura 2, acoplada hasta ahora al vehículo portador... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de recuperación y frenado de objetos que vuelan libremente en el espacio, en particular para capturar satélites y otros objetos en órbita, compuesto de un vehículo espacial que se usa como vehículo portador dirigible, 5 equipado con al menos un propulsor de control de la posición de vuelo, y en el que está dispuesta al menos una unidad de captura que está unida al vehículo espacial y ha de ser lanzada desde el mismo, así como que se puede separar del vehículo espacial y está equipada con al menos una carga propulsora propia y un dispositivo de captura, caracterizado por que cada unidad de captura (2) está unida de manera separable mediante una cuerda (5) a la red de captura (4) y por que la carga propulsora está equipada con al menos una tobera de empuje (3) configurada como dispositivo de frenado.
2. Dispositivo según la reivindicación 1, caracterizado por que cuatro unidades de captura (2) están sujetadas en el vehículo portador (1) .
3. Dispositivo según la reivindicación 2, caracterizado por que varias unidades de captura (2) están agrupadas para formar una conexión en serie o en paralelo.
Patentes similares o relacionadas:
Manipulación de un satélite en el espacio, del 8 de Julio de 2020, de THALES: Sistema de manipulación de un objeto espacial en el espacio, comprendiendo el sistema una estructura articulada, comprendiendo dicha estructura […]
Satélites apilables y método de apilamiento de los mismos, del 24 de Junio de 2020, de Worldvu Satellites Limited: Un sistema de satélites apilables que comprende: al menos dos satélites apilables , en el que cada satélite apilable comprende: […]
Placa voladora de rigidez variable para dispositivo de penetración, del 27 de Mayo de 2020, de THE BOEING COMPANY: Un dispositivo de penetración que comprende: una carcasa ; un propelente posicionado en la carcasa; y una placa […]
Arquitectura de bus Cubesat, del 22 de Abril de 2020, de Université de Montpellier: Bus de nano-satélite, que comprende: - un bastidor mecánico mono-bloque que comprende múltiples postes y bordes (2, 2') que forman los lados de dicho bastidor […]
 Dispositivo pasivo diseñado para facilitar la desintegración de un sistema espacial durante su reentrada a la atmósfera terrestre, del 29 de Enero de 2020, de Thales Alenia Space Italia S.p.A. Con Unico Socio: Un sistema espacial que comprende una estructura formada por componentes estructurales , un equipo de a bordo que es portado por la estructura […]
Dispositivo pasivo diseñado para facilitar la desintegración de un sistema espacial durante su reentrada a la atmósfera terrestre, del 29 de Enero de 2020, de Thales Alenia Space Italia S.p.A. Con Unico Socio: Un sistema espacial que comprende una estructura formada por componentes estructurales , un equipo de a bordo que es portado por la estructura […]
Dispositivo de conexión de objetos por lámina, del 29 de Enero de 2020, de THALES: Conjunto que comprende un primer objeto y un segundo objeto y un dispositivo de conexión que comprende una primera lámina , adecuada para pasar de una […]
 Dispositivo de aerofrenado de satélite, del 30 de Octubre de 2019, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Dispositivo de aerofrenado de satélite que comprende un velamen desplegable, caracterizado por que el velamen, una vez desplegado, es una estructura tridimensional […]
Dispositivo de aerofrenado de satélite, del 30 de Octubre de 2019, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Dispositivo de aerofrenado de satélite que comprende un velamen desplegable, caracterizado por que el velamen, una vez desplegado, es una estructura tridimensional […]
Dispositivo para desplazar o retirar satélites artificiales, del 23 de Octubre de 2019, de D-Orbit SpA: Dispositivo para acoplarse a un satélite espacial (20', 20") antes del lanzamiento para retirar dicho satélite del espacio o desplazar […]