PARTE TERMINAL DE UN ELEMENTO RECOGEDOR ROBOTICO PROVISTO DE COPAS DE ASPIRACION POR VACIO.
Parte terminal (10) para un elemento recogedor robótico destinado a levantar unos objetos (12) y transferirlos a posiciones distintas de las posiciones iniciales,
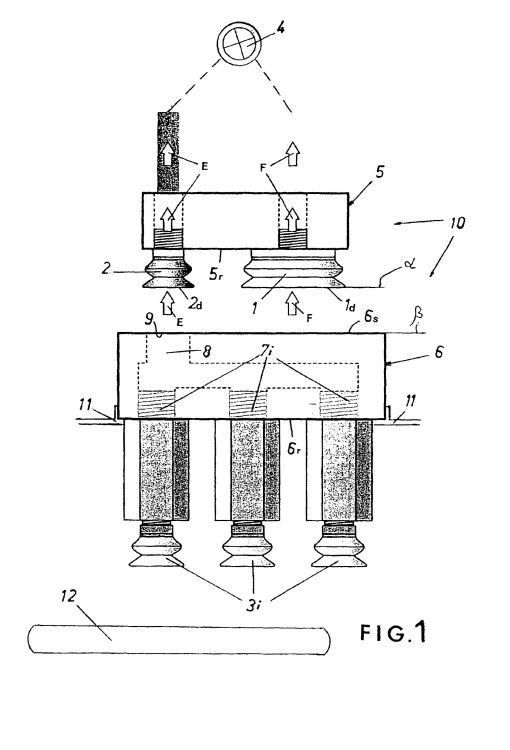
estando realizada la conexión entre dicha parte terminal (10) y dichos objetos (12) por medio de unas copas de aspiración (3i) en las cuales se crea el vacío por medio de un equipo neumático (4) conectado a las mismas, comprendiendo la parte terminal: a) una unidad principal (5), sobre la cara inferior (5r) de la cual están fijadas una copa de aspiración de soporte (1) y una copa de aspiración de trasferencia del vacío (2) conectadas al equipo neumático (4) anteriormente mencionado; b) una unidad secundaria (6), sobre la cara inferior (6r) de la cual están montadas una pluralidad de copas de aspiración recogedoras (3i) las cuales pueden ser de tipos diferentes, estando conectados los pasos de succión (7i) a un único paso colector (8) que se abre dentro de un orificio (9) formado sobre la cara superior (6s) de dicha unidad secundaria (6); siendo la cara superior (6s) de la unidad secundaria (6) lisa y conformada de tal modo que se puede adherir tanto a dicha copa de soporte (1) como a la copa de trasferencia del vacío (2) de la unidad principal (5) cuando se colocan en la proximidad de la misma y la copa de trasferencia del vacío (2) de la unidad principal (5) está enfrentada y es coaxial con el orificio (9) anteriormente mencionado de la unidad secundaria (6).
Tipo: Resumen de patente/invención.
Solicitante: AROUND THE CLOCK SA.
Nacionalidad solicitante: Panamá.
Dirección: CALLE 53E, URBANIZACION MARBELLA MMG TOWER, PISO 16,PANAMA.
Inventor/es: SALIMKHAN,JACQUES.
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Mayo de 2008.
Clasificación PCT:
- B25J15/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
- B25J15/06 B25J 15/00 […] › con medios de retención magnéticos o que funcionan por succión.
Patentes similares o relacionadas:
DISPOSITIVO, SISTEMA Y MÉTODO DE FIJACIÓN CONTROLABLE MEDIANTE UN BRAZO MECÁNICO, del 2 de Abril de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico, del 27 de Marzo de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]
Dispositivo de embalaje y sistema de clasificación para el embalaje direccional de productos y método para el mismo, del 18 de Diciembre de 2019, de DE GREEF'S WAGEN- CARROSSERIE- EN MACHINEBOUW B.V.: Dispositivo de embalaje para el embalaje direccional de productos (P), como verduras y frutas, que comprende: - un sistema de sensor que comprende: un sistema […]
Dispositivo para el bloqueo de un elemento de barra usando un bloque de bloqueo, del 18 de Diciembre de 2019, de KOREA PNEUMATIC SYSTEM CO., LTD: Dispositivo para bloquear un elemento de barra, el dispositivo comprende: una sección del cuerpo que tiene un orificio vertical en este y una unidad […]
Aparato y procedimiento para separar y desplazar de forma repetida la bolsa de más arriba de una pila de bolsas, del 4 de Diciembre de 2019, de Premier Tech Technologies Ltée: Aparato para separar y desplazar repetidamente una bolsa de más arriba de una pila de bolsas que incluye una segunda bolsa de más arriba situada […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]