ROBOT SALTADOR Y PROCEDIMIENTO PARA SU CONTROL.
Robot saltador y procedimiento para su control.
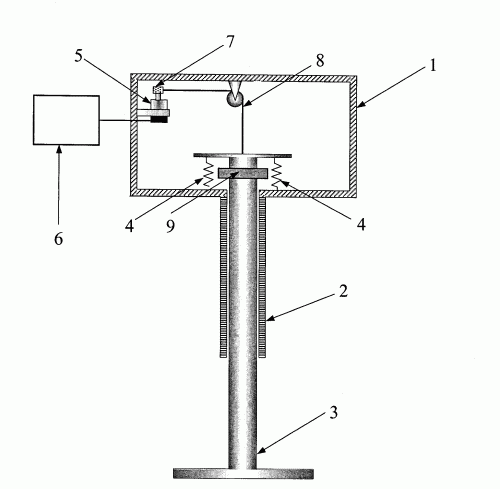
Robot saltador para el movimiento en terrenos con obstáculos,
que contiene al menos un resorte (4) con uno de sus extremos unido al cuerpo (1) del robot, y una cadena cinemática entre el motor (5) y el resorte (4) que comprende un cilindro (7) conectado con el eje del motor (5) y una cuerda (8), con uno de sus extremos conectado al cilindro (7) y con el segundo extremo conectado al pie (3).
El procedimiento de control se caracteriza porque en el momento en el que el pie (3) pierde el contacto con el suelo se hace girar al motor (5) un ángulo {al}, y se mantiene en dicha posición hasta el próximo contacto del pie (3) con el suelo, momento en el que se hace girar al motor (5) un ángulo -{al}.
Tipo: Resumen de patente/invención.
Solicitante: CONSEJO SUP. INVESTIG. CIENTIFICAS.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, FERNANDEZ SAAVEDRA,ROEMI EMILIA, MONTES FRANCESCHI,HECTOR.
Fecha de Solicitud: 24 de Mayo de 2002.
Fecha de Publicación: .
Fecha de Concesión: 8 de Septiembre de 2005.
Clasificación Internacional de Patentes:
- B62D57/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › con medios de propulsión en contacto con el suelo, p. ej. por piernas mecánicas.
Patentes similares o relacionadas:
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
 Estabilizador de robot de dos ruedas para lanzar, del 12 de Agosto de 2015, de Przemyslowy Instytut Automatyki i Pomiarow PIAP: Estabilizador de robot móvil de dos ruedas compuesto por dos lastres de caucho conectados a un armazón de robot y dispuestos de manera simétrica […]
Estabilizador de robot de dos ruedas para lanzar, del 12 de Agosto de 2015, de Przemyslowy Instytut Automatyki i Pomiarow PIAP: Estabilizador de robot móvil de dos ruedas compuesto por dos lastres de caucho conectados a un armazón de robot y dispuestos de manera simétrica […]
 Método y dispositivo de tracción por impulsos, del 19 de Marzo de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma […]
Método y dispositivo de tracción por impulsos, del 19 de Marzo de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma […]
 MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL, del 1 de Enero de 2008, de FUNDACION FATRONIK: Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un […]
MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL, del 1 de Enero de 2008, de FUNDACION FATRONIK: Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
Aparato estabilizado por giróscopo, y en particular un robot bípedo., del 16 de Mayo de 2002, de COMMISSARIAT A L'ENERGIE ATOMIQUE: Aparato compuesto por al menos una pierna de apoyo y un cuerpo superior unido a la pierna de apoyo, y configurado a modo de péndulo inverso con relación a […]