7 inventos, patentes y modelos de FERNANDEZ SAAVEDRA,ROEMI EMILIA
DISPOSITIVO PARA LA MEDICIÓN AUTOMÁTICA DEL VOLUMEN DE UN FLUIDO QUE CORRE POR UN CONDUCTO Y EL PROCEDIMIENTO PARA SU MEDICIÓN Y SU POSTERIOR VACIADO AUTÓNOMO EN FUNCIÓN DE LA CANTIDAD DE FLUIDO ACUMULADO.
(22/01/2014) Dispositivo para la medición automática del volumen de un fluido que corre por un conducto y el procedimiento para su medición y su posterior vaciado autónomo en función de la cantidad de fluido acumulado.
Dispositivo para la medición del volumen de un fluido que corre por un conducto y su posterior vaciado autónomo compuesto por un receptor de líquido y un sensor capacitivo y que se caracteriza porque el receptor de líquido tiene en su interior un elemento central móvil con un obturador para controlar el vaciado del líquido.
El procedimiento para la medición y vaciado se caracteriza porque se mide el volumen de fluido Vi en el receptor de líquido con un intervalo…
DISPOSITIVO PARA LA MEDICIÓN AUTOMÁTICA DE LA CANTIDAD DE LÍQUIDO QUE FLUYE Y EL PROCEDIMIENTO PARA SU MEDICIÓN.
(13/02/2013) Dispositivo para la medición automática de la cantidad de líquido que fluye y el procedimiento para su medición.
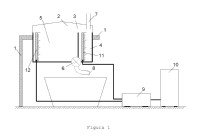
Dispositivo para la medición de la cantidad de líquido que fluye compuesto por un receptor de líquido dividido en dos cámaras , una válvula externa , un tubo flexible y una unidad de cálculo y que se caracteriza porque el receptor de líquido tiene instalado en su pared externa dos sensores capacitivos que miden el nivel de líquido contenido en cada cámara. El procedimiento para la medición se caracteriza porque se mide el volumen de líquido Vi contenido en la primera cámara de volumen R1 con un intervalo T1, utilizando el primer sensor capacitivo y cuando Vi >= R1 - ε, se determina si se permite que el líquido pase a la segunda cámara , donde se mide el volumen…
DISPOSITIVO PARA LA MEDICIÓN AUTOMÁTICA DE LA CANTIDAD DE LÍQUIDO QUE FLUYE Y EL PROCEDIMIENTO PARA SU MEDICIÓN.
Secciones de la CIP Necesidades corrientes de la vida Física
(06/12/2012). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Clasificación: A61B5/20, G01F23/26.
Dispositivo para la medición de la cantidad de liquido que fluye compuesto por un receptor de liquido dividido en dos cámaras , una válvula externa , un tubo flexible y una unidad de cálculo y que se caracteriza porque el receptor de liquido tiene instalado en su pared externa dos sensores capacitivos que miden el nivel de liquido contenido en cada cámara. El procedimiento para la medición se caracteriza porque se mide el volumen de liquido.
DISPOSITIVO PARA EL TRANSPORTE DE PERSONAS O COSAS Y EL PROCEDIMIENTO PARA SU CONTROL.
Sección de la CIP Técnicas industriales diversas y transportes
(16/06/2008). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR INVEST.CIENTIFICAS. Clasificación: B62D61/12, B62B5/02.
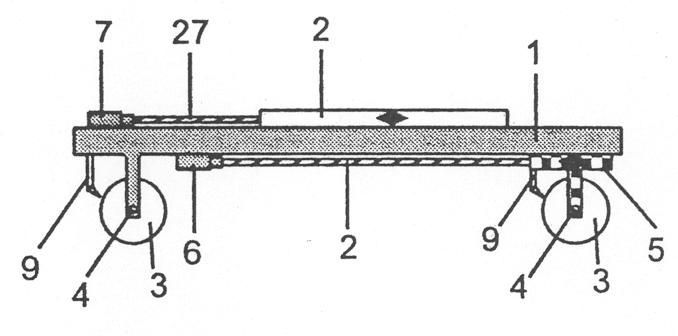
Dispositivo para el transporte de personas o cosas y el procedimiento para su control.#La conexión de al menos uno de los ejes con el cuerpo del dispositivo se realiza a través de un elemento móvil que permite la traslación relativa del eje con respecto al cuerpo y que se encuentra cinemáticamente conectado al motor del elemento móvil. El motor del elemento móvil está fijado en el cuerpo del dispositivo. Además, cada una de las ruedas contiene un elemento fijador conectado al sistema de control que impide la rotación de las mismas alrededor de sus ejes respectivos, al menos en una dirección.
ROBOT CUADRUPEDO PARA PROCESOS TECNOLOGICOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/03/2007). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: B25J9/12.
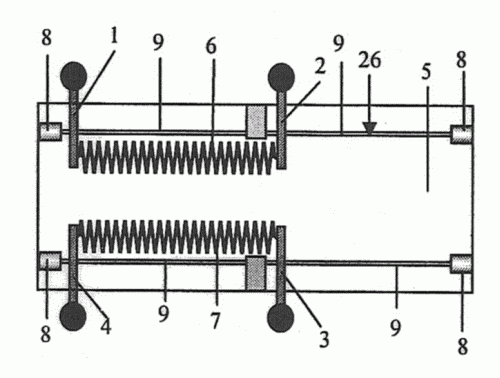
Robot cuadrúpedo para procesos tecnológicos que contiene dos elementos elásticos y , con uno de los extremos del primer elemento elástico conectado a la pata , y el otro extremo conectado a la pata , y con un extremo del segundo elemento elástico conectado a la pata y el otro extremo conectado a la pata . Tanto la rigidez como la longitud de los elementos elásticos y es la misma, y la longitud se elige de tal manera que cada uno de los elementos elásticos y esté en estado de equilibrio sin deformación cuando una de las patas a la que está conectado el correspondiente elemento elástico está en una posición extrema y la otra pata está en la posición media de la distancia entre sus posiciones extremas.
ROBOT SALTADOR Y PROCEDIMIENTO PARA SU CONTROL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/10/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: B62D57/02.
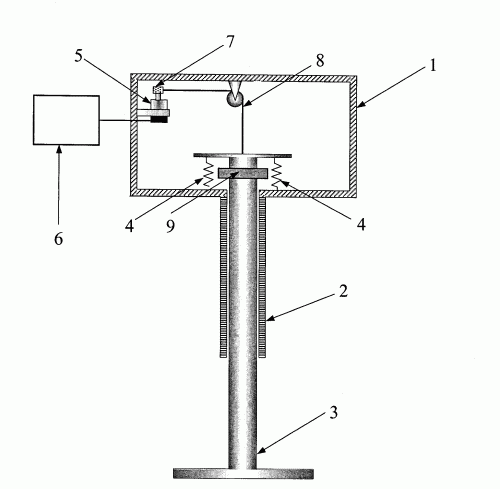
Robot saltador y procedimiento para su control. Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte con uno de sus extremos unido al cuerpo del robot, y una cadena cinemática entre el motor y el resorte que comprende un cilindro conectado con el eje del motor y una cuerda , con uno de sus extremos conectado al cilindro y con el segundo extremo conectado al pie . El procedimiento de control se caracteriza porque en el momento en el que el pie pierde el contacto con el suelo se hace girar al motor un ángulo {al}, y se mantiene en dicha posición hasta el próximo contacto del pie con el suelo, momento en el que se hace girar al motor un ángulo -{al}.
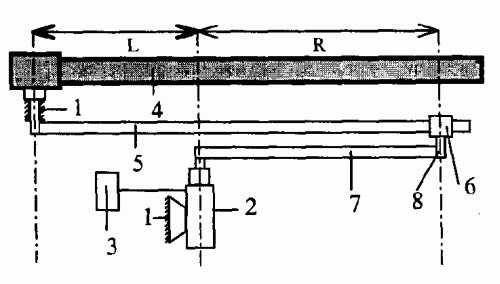
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Clasificación: F16H21/18, B62D57/02, A63H31/08, A63H11/18.
Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos de arranque-parada, que se caracteriza porque la conexión cinemática entre el motor y el elemento de trabajo contiene un eslabón móvil conectado a la base y con posibilidad de rotación alrededor del punto de conexión, una corredera que se desliza a lo largo del eslabón móvil , y una manivela conectada cinemáticamente con el motor y unida a charnela por medio del dedo con la corredera . El procedimiento para su control se caracteriza porque el movimiento del elemento de trabajo se realiza a través del eslabón móvil , rotando la manivela con la ayuda del motor y porque las posiciones de arranque y parada están determinadas por el ángulo formado entre la manivela y el eslabón móvil.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}