Estabilizador de robot de dos ruedas para lanzar.
Estabilizador de robot móvil de dos ruedas compuesto por dos lastres (1) de caucho conectados a un armazón (6) de robot y dispuestos de manera simétrica en relación con un plano medio ortogonal a un eje (7) de rueda de robot y por un rodillo (2) de caucho fijado de manera que puede girar sobre un árbol (3) incrustado en orificios en los extremos de los lastres (1),
teniendo cada lastre (1) cortes (4) radiales diseñados para la unión al armazón (6) del robot.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13460074.
Solicitante: Przemyslowy Instytut Automatyki i Pomiarow PIAP.
Nacionalidad solicitante: Polonia.
Dirección: Al. Jerozolimskie 202 02-486 Warszawa POLONIA.
Inventor/es: DUDEK,LUKASZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D57/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › con medios de propulsión en contacto con el suelo, p. ej. por piernas mecánicas.
PDF original: ES-2547345_T3.pdf
Descripción:
Estabilizador de robot de dos ruedas para lanzar
La invención se refiere a un estabilizador de robot móvil de dos ruedas que puede tirarse.
A partir de la solicitud de patente polaca n.° PL210815 se conoce un robot móvil de dos ruedas diseñado para penetrar en y observar zonas de acceso restringido. Este robot está equipado con un soporte conectado con un cuerpo principal que protege el mecanismo del robot frente a daños durante una caída. El soporte tiene en su extremo un peso, que en cierta medida estabiliza el robot. Sin embargo, obstaculiza el movimiento del robot en un terreno irregular. Los documentos US 2012/0137862 A1, US 2010/0152922 A1 y US 2009/0124164 A1 dan a conocer otros robots móviles de dos ruedas que tienen un estabilizador.
El objetivo de esta invención es desarrollar un estabilizador de robot móvil de dos ruedas, que protege el mecanismo del robot durante la caída así como permite un movimiento del robot en zonas con superficies irregulares.
La esencia de la invención consiste en un estabilizador de robot móvil de dos ruedas compuesto por dos lastres de caucho conectados a un armazón de robot y dispuestos de manera simétrica en relación con un plano medio ortogonal a un eje de las ruedas del robot y de un rodillo de caucho fijado de manera que puede girar sobre un árbol incrustado en orificios en los extremos del lastre, teniendo los lastres cortes radiales diseñados para su unión al armazón del robot.
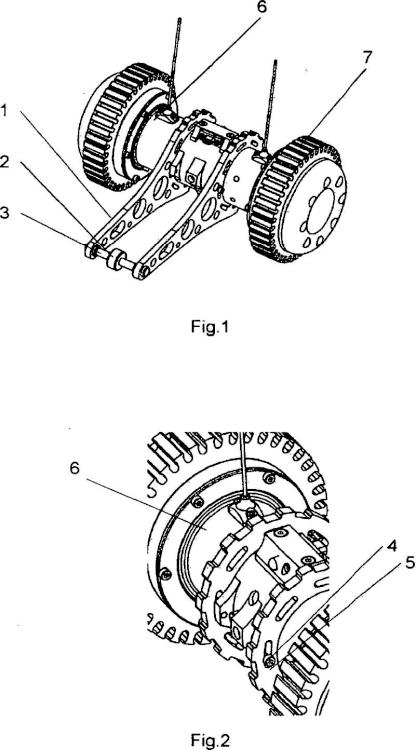
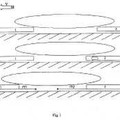
El contenido de la invención se muestra en las siguientes figuras, en las cuales la figura 1 presenta un estabilizador de robot de dos ruedas para lanzar en una vista en perspectiva, y la figura 2 un montaje de lastre en el armazón del robot en una vista en perspectiva.
El estabilizador de robot móvil de dos ruedas está compuesto por dos lastres (1) de caucho conectados a un armazón (6) de robot y dispuestos de manera simétrica en relación con un plano medio ortogonal a un eje (7) de las ruedas del robot y por un rodillo (2) de caucho fijado de manera que puede girar sobre un árbol (3) incrustado en orificios en los extremos del lastre (1). Cada lastre (1) tiene cortes (4) radiales diseñados para la unión del robot al armazón (6). La unión es posible usando tornillos (5). Durante el movimiento del robot, el rodillo (2) de caucho rueda sobre la superficie sobre la que se mueve el robot, lo que puede reducir significativamente la fricción y el ruido generados por el robot durante el movimiento y la caída desde una gran altura. El estabilizador impide la rotación del robot dos ruedas alrededor de su propio eje, lo que le permite moverse hacia delante. El rodillo (2) y el árbol (3) también sirven de contrapeso para el robot cuando se mueve hacia atrás. El estabilizador de caucho también tiene el papel adicional de proteger una parte central del armazón del robot frente a daños como resultado de una caída por un borde u otro obstáculo, caída que no puede amortiguarse mediante las ruedas del robot. El equipamiento del lastre (1) con cortes (4) radiales permite montarlos al armazón (6) del robot en diferentes posiciones, lo que permite cambiar el ángulo de observación de una cámara instalada en el armazón (6) del robot. Los cortes (4), además de su función de control, realizan otras tareas como la de amortiguación, aumentando la sensibilidad del lastre (1) de caucho. El estabilizador de la invención proporciona una gran flexibilidad y amortiguación en caso de caída del robot desde una gran altura. Sin embargo, tiene suficiente rigidez para bloquear la rotación del robot sobre su eje permitiendo moverse en todas direcciones. El uso de componentes de caucho como lastre para el robot de dos ruedas ha aumentado la durabilidad y sencillez de la construcción del estabilizador. El estabilizador de caucho es más resistente en comparación con otros estabilizadores de metal similares, cuya sensibilidad se ha obtenido usando un cable de acero.
Reivindicaciones:
1. Estabilizador de robot móvil de dos ruedas compuesto por dos lastres (1) de caucho conectados a un armazón (6) de robot y dispuestos de manera simétrica en relación con un plano medio ortogonal a un eje 5 (7) de rueda de robot y por un rodillo (2) de caucho fijado de manera que puede girar sobre un árbol (3)
incrustado en orificios en los extremos de los lastres (1), teniendo cada lastre (1) cortes (4) radiales diseñados para la unión al armazón (6) del robot.
Patentes similares o relacionadas:
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
 Método y dispositivo de tracción por impulsos, del 19 de Marzo de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma […]
Método y dispositivo de tracción por impulsos, del 19 de Marzo de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma […]
 MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL, del 1 de Enero de 2008, de FUNDACION FATRONIK: Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un […]
MAQUINA-HERRAMIENTA ROBOTIZADA PORTATIL, del 1 de Enero de 2008, de FUNDACION FATRONIK: Máquina-herramienta robotizada portátil, que consta de un bastidor en el que se disponen una serie de ventosas para su fijación sobre una pieza a trabajar; un […]
ROBOT SALTADOR Y PROCEDIMIENTO PARA SU CONTROL., del 1 de Octubre de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Robot saltador y procedimiento para su control. Robot saltador para el movimiento en terrenos con obstáculos, que contiene al menos un resorte con uno de sus extremos unido […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
Aparato estabilizado por giróscopo, y en particular un robot bípedo., del 16 de Mayo de 2002, de COMMISSARIAT A L'ENERGIE ATOMIQUE: Aparato compuesto por al menos una pierna de apoyo y un cuerpo superior unido a la pierna de apoyo, y configurado a modo de péndulo inverso con relación a […]