SISTEMA ROBOTICO.
Un robot autónomo, autopropulsado para movimiento sobre una superficie que ha de ser tratada,
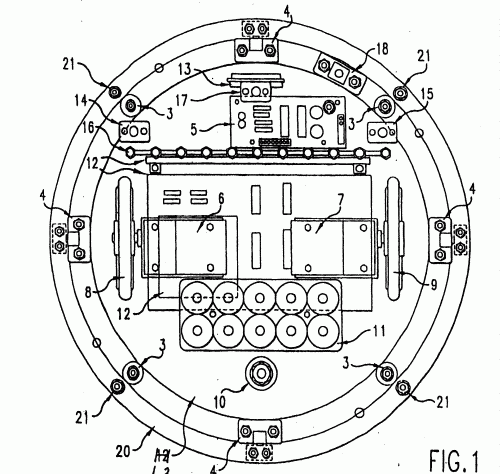
comprendiendo el robot: un suministro (11) de potencia; un mecanismo (6-9) de tracción que recibe potencia del suministro de potencia para mover el robot sobre la superficie; un mecanismo (16) para depositar de modo controlable un material fluido sobre la superficie; una pluralidad de sensores (4, 13, 18, 21) que proporcionan señales para permitir que el robot navegue sobre la superficie; uno o más detectores (14, 15, 17) destinados a detectar la presencia del material sobre la superficie y a proporcionar señales indicativas del mismo; y un sistema (12, 100) de control que recibe las señales de los sensores y detectores, para controlar el mecanismo de tracción y el mecanismo de deposición con dependencia de las señales recibidas de los sensores y detectores, caracterizado porque el sistema (12, 100) de control funciona para controlar la deposición del material fluido mediante una combinación de estrategias que comprende una estrategia de navegación y una estrategia de control del régimen de deposición, en el que la estrategia de navegación consiste en hacer navegar el robot alrededor de áreas previamente tratadas de la superficie y la estrategia de control del régimen de deposición consiste en controlar el mecanismo (16) de deposición para detener o reducir el depósito de material fluido sobre la superficie a medida que el robot pasa sobre aquellas áreas previamente tratadas, y en el que el sistema de control arbitra entre las dos estrategias dependiendo de las señales recibidas de los sensores (4, 13, 18, 21) de navegación y de los detectores (14, 15, 17) de deposición.
Tipo: Resumen de patente/invención.
Solicitante: THE PROCTER & GAMBLE COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ONE PROCTER & GAMBLE PLAZA,CINCINNATI, OHIO 45202.
Inventor/es: BOTTOMLEY, IAN, COATES, DAVID, GRAYDON, ANDREW, RUSSELL, JAMIESON, DAVID MCCRORY.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Julio de 1999.
Fecha Concesión Europea: 26 de Noviembre de 2003.
Clasificación Internacional de Patentes:
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Portugal, Irlanda, Finlandia, Chipre, Oficina Europea de Patentes, Armenia, Azerbayán, Bielorusia, Ghana, Gambia, Kenya, Kirguistán, Kazajstán, Lesotho, República del Moldova, Malawi, Federación de Rusia, Sudán, Sierra Leona, Tayikistán, Turkmenistán, Uganda, Zimbabwe, Burkina Faso, Benin, República Centroafricana, Congo, Costa de Marfil, Camerún, Gabón, Guinea, Malí, Mauritania, Niger, Senegal, Chad, Togo, Organización Regional Africana de la Propiedad Industrial, Swazilandia, Guinea-Bissau, Organización Africana de la Propiedad Intelectual, Organización Eurasiática de Patentes.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]