Robot humanoide jugador, método y sistema de utilización de dicho robot.
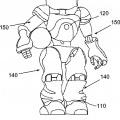
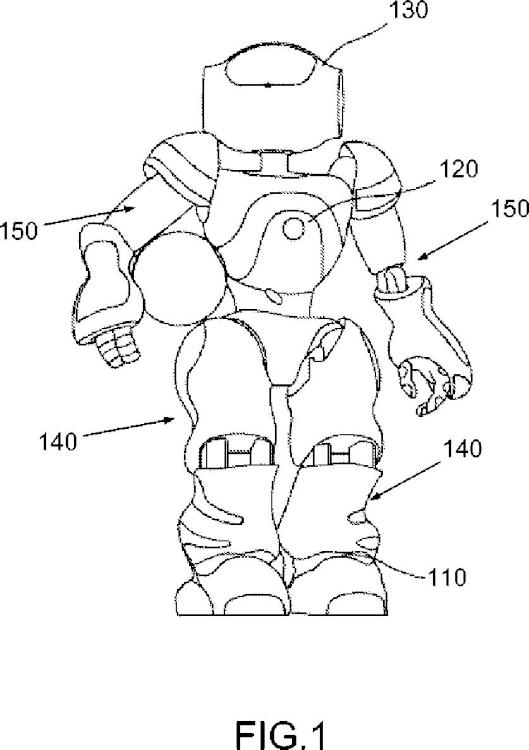
Robot (100) humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros (140) inferiores,
efectúe movimientos de miembros (150) superiores, emita y reciba unos mensajes que pertenecen al grupo de los mensajes visuales, sonoros, gestuales y/o táctiles y produzca al menos un comportamiento autónomo, constituyendo dicho al menos un comportamiento un elemento de una secuencia de un juego generada como respuesta a al menos un mensaje que pertenece al grupo de los mensajes visuales, sonoros, gestuales y/o táctiles, dicho robot estando caracterizado porque dicho al menos un procesador está configurado para que el robot haga al menos una pregunta en forma de mensaje que pertenece al grupo de los mensajes visuales, sonoros, gestuales y/o táctiles y determine si al menos un mensaje de respuesta que pertenece al mismo grupo contiene un respuesta verdadera, una respuesta falsa o una respuesta ambigua,
efectuándose dicha determinación mediante dicho al menos un procesador a la salida de un bucle de repeticiones determinadas en función de umbrales de reconocimiento de dichas respuestas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/060693.
Solicitante: Aldebaran Robotics.
Nacionalidad solicitante: Francia.
Dirección: 168 bis - 170 rue Raymond Losserand 75014 Paris FRANCIA.
Inventor/es: MONCEAUX,JÉRÔME, BOUDIER,CÉLINE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63F9/18 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63F JUEGOS DE CARTAS, RULETA O JUEGOS DE MESA; JUEGOS DE INTERIOR QUE UTILIZAN PEQUEÑOS ELEMENTOS DE JUEGO MOVILES; JUEGOS NO PREVISTOS EN OTRO LUGAR; GAMES NOT OTHERWISE PROVIDED FOR. › A63F 9/00 Juegos no previstos en otro lugar (aspectos de juegos que utilizan una presentación en varias dimensiones generada electronicamente que muestra representaciones relativas al juego A63F 13/00). › Juegos de preguntas y respuestas.
- A63F9/24 A63F 9/00 […] › Juegos que utilizan circuitos electrónicos, no previstos en otro lugar.
- A63H11/18 A63 […] › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 11/00 Figuras que se desplazan por sí mismas. › Figuras que realizan un movimiento natural de marcha.
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
PDF original: ES-2553146_T3.pdf

Patentes similares o relacionadas:
 Dispositivo de mesa de juego, del 29 de Julio de 2020, de GAMING PARTNERS INTERNATIONAL: Dispositivo de mesa de juego, en especial de tipo casino, que comprende:-
- al menos una mesa (T) de juego con tapete de juego que define al menos una zona […]
Dispositivo de mesa de juego, del 29 de Julio de 2020, de GAMING PARTNERS INTERNATIONAL: Dispositivo de mesa de juego, en especial de tipo casino, que comprende:-
- al menos una mesa (T) de juego con tapete de juego que define al menos una zona […]
Controlador inalámbrico multi-posicional con elementos de configuración rápida incluida en un módulo intercambiable, del 7 de Julio de 2020, de SOTES ROS, Bartolomé: La presente realización muestra un controlador multi-posicional inalámbrico que presenta al menos dos grados de libertad y diseñada para […]
Caja de embalaje para naipes barajados, del 13 de Mayo de 2020, de ANGEL PLAYING CARDS CO., LTD. (100.0%): Un procedimiento para insertar un naipe de corte en un paquete de naipes (i) barajados aleatoriamente, en el que el paquete comprende un número […]
Procedimiento para administrar un paquete de cartas de juego barajadas, del 15 de Abril de 2020, de ANGEL PLAYING CARDS CO., LTD. (100.0%): Un sistema para administrar una pluralidad de paquetes de cartas de juego barajadas (1S), que se barajan en orden aleatorio y se empaquetan individualmente […]
JUGUETE INTERACTIVO, del 28 de Enero de 2020, de VIDAL ROJAS, Juan Antonio: 1. Juguete interactivo, caracterizado por comprender un elemento activador que actúa como medio de enlace con una aplicación informática tipo app de realidad […]
Sistema de gestión de moneda sustituta para jugar, del 18 de Diciembre de 2019, de ANGEL PLAYING CARDS CO., LTD. (100.0%): Un sistema de gestión de moneda sustituta para jugar que comprende: moneda sustituta para jugar a la que se adjunta un ID único que es identificable individualmente; […]
Procedimiento para administrar un paquete de cartas de juego barajadas, del 13 de Noviembre de 2019, de ANGEL PLAYING CARDS CO., LTD. (100.0%): Un sistema para administrar un paquete de cartas de juego barajadas (1S), en el que un número predeterminado de barajas de cartas de juego […]
Sistema para gestionar paquetes de naipes barajados, del 18 de Septiembre de 2019, de ANGEL PLAYING CARDS CO., LTD. (100.0%): Un sistema para gestionar paquetes de naipes barajados (1s), que comprende: paquetes de naipes barajados (1s) en los que los naipes incluidos en un […]