TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES.
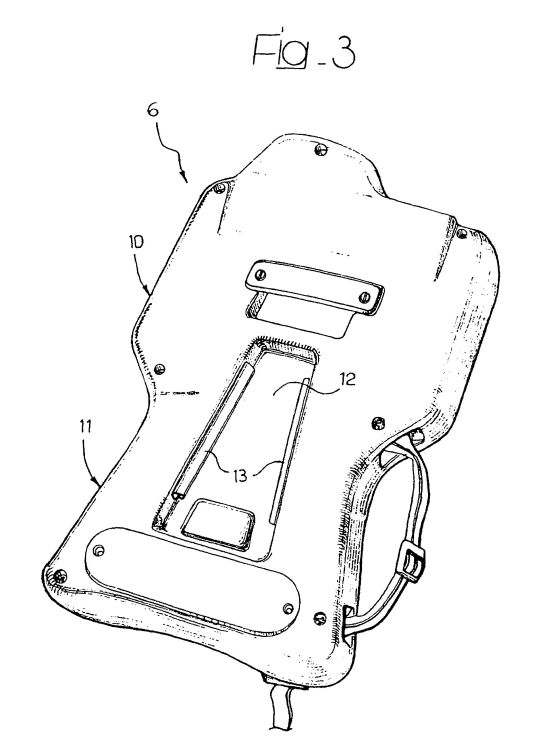
Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control (5) de movimientos según los ejes múltiples de un aparato automático (1) que soporta una herramienta (4),
tal como un robot o similar, presentando el terminal (6) un cuerpo que se extiende longitudinalmente que define una primera parte (10) y comprendiendo una segunda parte (11) un área de unión con la primera parte (10), en el que en correspondencia con un lado frontal de la primera parte (10) está previsto un dispositivo de presentación visual (D) y en correspondencia con un lado frontal de la segunda parte (11) está prevista una multiplicidad de teclas, comprendiendo dicha multiplicidad: #- una pluralidad de teclas de movimiento (14) que pueden ser accionadas manualmente para proporcionar a la unidad de control (5) una respectiva señal de control para el aparato (1), siendo operativa dicha señal de control para hacer que la herramienta (4) ejecute un movimiento de rotación o traslación alrededor o a lo largo del eje correspondiente a la tecla de movimiento pulsada (14), #- una pluralidad de teclas de indicación (15-24, 26), capaces de ser accionadas manualmente para programar la unidad de control (5) y/o controlar el aparato (1) y/o almacenar una posición alcanzada por un punto predefinido (TCP) de la herramienta (4) como resultado de un movimiento del aparato (1), caracterizado porque #- la segunda parte (11) del cuerpo del terminal (6) presenta dos lados longitudinales oblicuos que convergen hacia dicha área de unión, en la cual está definida la zona más restringida del cuerpo del terminal, presentando por lo tanto la segunda parte (11) una anchura que se reduce progresivamente hasta alcanzar dicha área de unión, #- dicha pluralidad de teclas de movimiento (14) comprende una primera y una segunda serie de teclas (14), estando dispuesta cada una de ellas a lo largo de un respectivo lado longitudinal oblicuo de la segunda parte (11), preferentemente en una forma sustancialmente simétrica entre sí, incluyendo cada serie una pluralidad de teclas (14) para controlar los movimientos según los respectivos ejes del aparato automático (1), y #- dicha pluralidad de teclas de indicación (15-24, 26) comprende un grupo de teclas (15-22, 26) que están dispuestas en el interior de dicha área de unión o en la proximidad de la misma, que incluye #- unos medios de selección (18), para seleccionar un sistema de coordinación deseado entre una pluralidad de sistemas coordinados ("Base", "Herramienta", "Juntas"), dependiendo el funcionamiento de las teclas de movimiento (14) de una selección realizada a través de los medios de selección (18); y #- una o más teclas seleccionadas de entre el grupo constituido por: #- una tecla (15) para variar la velocidad de traslación del aparato automático (1); #- una tecla (16) para iniciar una secuencia de movimientos del aparato automático (1); #- una tecla (17) para detener un movimiento del aparato automático (1); #- una tecla (19), que, cuando se pulsa, hace que el aparato automático (1) localice uno o más movimientos ejecutados anteriormente; #- una tecla (26) para ordenar la ejecución de las etapas individuales de una secuencia de movimientos del aparato automático (1) establecida anteriormente, #- una pluralidad de teclas de programación (20-22) que comprende por lo menos múltiples teclas de cursor (20), una tecla de grabación de datos (21), una tecla de modificación de datos (22).
Tipo: Resumen de patente/invención.
Solicitante: COMAU S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA RIVALTA 30,10095 GRUGLIASCO (TORINO).
Inventor/es: FERLA, DAVIDE, LACHELLO, LUCA, GASTALDI, GIANLUCA, CANTELLO, GIORGIO, CALCAGNO, RENZO.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Agosto de 2003.
Fecha Concesión Europea: 1 de Julio de 2009.
Clasificación PCT:
- B25J13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › Puestos de control, p. ej. pupitres, cuadros de mando.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
 Procedimiento para manejar un robot industrial, del 28 de Septiembre de 2016, de Reis Group Holding GmbH & Co. KG: Procedimiento para manejar un robot industrial mediante un dispositivo de mando que comprende la etapa de procedimiento de tocar un elemento […]
Procedimiento para manejar un robot industrial, del 28 de Septiembre de 2016, de Reis Group Holding GmbH & Co. KG: Procedimiento para manejar un robot industrial mediante un dispositivo de mando que comprende la etapa de procedimiento de tocar un elemento […]
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES, del 8 de Septiembre de 2011, de KUKA ROBOTER GMBH: Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de […]
SISTEMA PARA PROGRAMAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, QUE COMPRENDE UN TERMINAL DE PROGRAMACION PORTATIL., del 16 de Mayo de 2007, de COMAU S.P.A.: Sistema de programación para un robot, o un aparato automático similar, que contiene una herramienta , comprendiendo el sistema una unidad de control […]