SISTEMA ROBOTICO PARA LA CARACTERIZACION DE LA RESPUESTA ANGULAR EN INSTRUMENTOS RADIOMETRICOS.
Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos.
El sistema está especialmente concebido para permitir obtener unos resultados de gran fiabilidad, resolución, precisión, y rapidez para determinar la respuesta angular del instrumento de que se trate, así como para inmunizar el ruido electromagnético y lumínico de los experimentos realizados. Para ello el sistema está constituido a partir de un brazo robótico (4), que permite girar de forma automatizada el instrumento a caracterizar desde +90º hasta -90º, brazo robótico que a través de una serie de circuitos electrónicos está asociado a un PC (1), a un panel de control (3) y a un multímetro digital (2). El brazo robótico (4) está dotado de medios de fijación del instrumento a caracterizar, mientras que el citado PC incorpora un software de programación que mediante un posicionador digital permite una alta precisión para las posiciones de dicho brazo robótico (4), permitiendo igualmentecalcular el error coseno del dispositivo a través de las medidas recibidas del multímetro (2)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200800223.
Solicitante: UNIVERSIDAD DE HUELVA.
Nacionalidad solicitante: España.
Provincia: HUELVA.
Inventor/es: ANDUJAR MARQUEZ,JOSE MANUEL, MARTINEZ BOHORQUEZ,MIGUEL ANGEL, AGUILAR NIETO,FRANCISCO JOSE, MEDINA GARCIA,JONATHAN.
Fecha de Solicitud: 29 de Enero de 2008.
Fecha de Publicación: .
Fecha de Concesión: 23 de Junio de 2010.
Clasificación Internacional de Patentes:
- G01J1/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01J MEDIDA DE LA INTENSIDAD, DE LA VELOCIDAD, DEL ESPECTRO, DE LA POLARIZACION, DE LA FASE O DE CARACTERISTICAS DE IMPULSOS DE LA LUZ INFRARROJA, VISIBLE O ULTRAVIOLETA; COLORIMETRIA; PIROMETRIA DE RADIACIONES. › G01J 1/00 Fotometría, p. ej. medidores de la exposición fotográfica (espectrofotometría G01J 3/00; especialmente adaptado a la pirometría de las radiaciones G01J 5/00). › Piezas ópticas o mecánicas.
- G01J1/42 G01J 1/00 […] › utilizando detectores eléctricos de radiaciones (piezas ópticas o mecánicas G01J 1/04; por comparación con una luz de referencia o un valor eléctrico G01J 1/10).
- G01J5/00 G01J […] › Pirometría de las radiaciones.
Clasificación PCT:
Fragmento de la descripción:
Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos.
Objeto de la invención
La presente invención se refiere a un sistema totalmente robótico para la caracterización de la respuesta angular en instrumentos radiométricos, concretamente para piranómetros, que son iluminados por una lámpara calibrada.
El objeto de la invención es proporcionar un dispositivo que permita girar de forma automatizada el citado piranómetro desde +90º hasta -90º (respecto de la vertical al plano del suelo), obteniéndose de forma automática, todas las medidas del instrumento, siendo dicho dispositivo capaz de autonivelarse horizontalmente de forma automática.
Así pues, el objeto de la invención es proporcionar un dispositivo mediante el que se obtengan unos resultados bastante mejores en fiabilidad, resolución y precisión, así como en rapidez para determinar la respuesta angular del instrumento y en capacidad para inmunizar el ruido electromagnético y lumínico de los experimentos.
Antecedentes de la invención
Para realizar la medición de la radiación solar, se emplean fundamentalmente entre otros dispositivos los piranómetros. Los más utilizados son aquellos que realizan mediciones dentro del espectro de radiación visible y del ultravioleta. Para la medida de la irradiancia solar espectral, la óptica de entrada del piranómetro debe tener una buena respuesta angular, también denominada respuesta coseno. La irradiancia medida por un instrumento ideal, siendo el ángulo cenital solar ?, es proporcional a la irradiancia medida en la vertical I0 y al coseno del mencionado ángulo: I = I0 cos ?.
La respuesta angular de los instrumentos se desvía de la anterior relación, tendiendo la mayoría a subestimar la irradiancia solar verdadera. Este hecho es lo que se denomina efecto coseno. La magnitud de este error varía desde las unidades hasta varias decenas porcentuales dependiendo del ángulo de incidencia. La respuesta angular afecta principalmente a la componente directa de la radiación global. La radiación difusa es menos afectada debido principalmente a dos factores: la radiación difusa generada en ángulos cercanos al horizonte es una pequeña porción de la radiación difusa total medida y en la zona UV esta radiación es aún más pequeña como consecuencia del aumento de la absorción por parte del ozono debido al mayor camino óptico. En la mayoría de los piranómetros de banda ancha y espectrorradiómetros el efecto coseno empieza a ser importante a partir de unos 70º de ángulo cenital.
El error coseno se atenua o disminuye con diferentes procedimientos físicos y/o mecánicos mejorando el comportamiento del instrumento. Para disminuir este problema a la mínima expresión se necesita conocer con exactitud la respuesta angular del instrumento para poder realizar analíticamente la caracterización del mismo. Para determinar la respuesta angular de este tipo de instrumentos, se pueden realizar diferentes ensayos tanto en el laboratorio como en campo.
Actualmente, en la mayoría de los centros en los que re realiza el proceso de caracterización de la respuesta angular en instrumentos radiométricos, este proceso se realiza de forma manual, con la consiguiente falta de fiabilidad, resolución y precisión, así como en rapidez para determinar la respuesta angular del instrumento y la capacidad para inmunizar el ruido electromagnético y lumínico de los experimentos.
Descripción de la invención
El sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos que la invención propone resuelve de forma plenamente satisfactoria la problemática anteriormente expuesta en los diferentes aspectos comentados.
Para ello, el dispositivo que se preconiza se materializa en un brazo robótico que hace girar de forma automatizada al piranómetro que se acopla al mismo, el cual es iluminado por una lámpara calibrada, giro que va desde +90º hasta -90º (respecto de la vertical al plano del suelo), obteniéndose de forma automática, todas las medidas del instrumento.
El dispositivo de la invención es capaz de autonivelarse horizontalmente de forma automática. Éste es gestionado a través de un PC, de manera que las medidas son adquiridas por un multímetro digital de alta precisión que es también controlado por el ordenador a través de un bus digital serie RS 232.
De esta manera se obtienen unos resultados bastante mejores en fiabilidad, resolución y precisión, así como en rapidez para determinar la respuesta angular del instrumento y en capacidad para inmunizar el ruido electromagnético y lumínico de los experimentos, ya que al ser automático se realiza en una sala oscura sin presencia cercana de la manipulación humana.
Descripción de los dibujos
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
La figura 1.- Muestra un diagrama de bloques en el que se observa dónde está integrado el objeto de la invención dentro del sistema automático de control y adquisición de datos para la caracterización de la respuesta angular en instrumentos radiométricos.
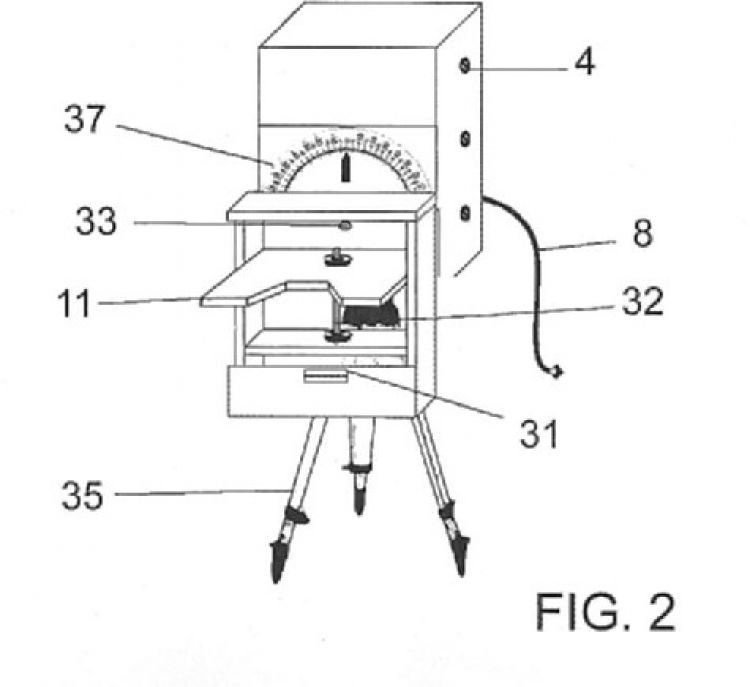
Las figuras 2 y 3.- Muestran sendas vistas frontal y de perfil del dispositivo objeto de la presente invención.
La figura 4.- Muestra una vista posterior del dispositivo de las figuras 2 y 3.
La figura 5.- Muestra un diagrama de bloques de los elementos que participan en el brazo robótico del dispositivo.
La figura 6.- Muestra una vista en perspectiva y esquemática de los diferentes elementos que participan conjuntamente al servomotor para desplazamiento del brazo robótico.
La figura 7.- Muestra una vista en perspectiva y en detalle del conjunto representado en la figura anterior.
La figura 8.- Muestra, finalmente, una vista en explosión del conjunto de la figura anterior.
Realización preferente de la invención
A la vista de las figuras reseñadas puede observarse como en el sistema de la invención particia un PC (1), asociado a un multímetro digital (2), asociado igualmente a un panel de conexiones (3) y a un brazo robótico, (4), al que se asocia el piranómetro a caracterizar.
Todo el sistema es controlado por un PC, en el que se ejecuta un software de adquisición de datos, desarrollado específicamente para esta invención. Mediante un posicionador digital se puede obtener una resolución cercana a 1/60 parte de un grado, lo que garantiza una precisión extraordinaria en todas las posiciones de medida del brazo robótico (4). Una vez realizada la caracterización del piranómetro objeto de estudio, el software ejecuta una serie de programas de forma automática y calcula el error coseno del dispositivo en función de todas las medidas recibidas del multímetro (2).
De forma más concreta, y tal y como se puede observar en la figura 5, el brazo robótico está constituido por una serie de módulos, como son un módulo de comunicación (6) del dispositivo con el multímetro (2), el cual incluye todo el control electrónico del instrumento.
A él llegan las señales provienientes del multímetro (2), que son las señales de control de posicionamiento de una serie de elementos de los que se hablará mas adelante, así como de la fuente de alimentación (7) del propio brazo, módulo que envía la información sobre el estado del dispositivo al multímetro (2) a través de un cable multipolar de 6 conductores (8).
La fuente de alimentación (7) proporciona al brazo robótico toda la energía necesaria para su funcionamiento y alimentación de sus motores. Se encuentra en el exterior para que no afecte a las medidas ya que podría inducir ruidos a través del transformador, disponiéndose junto al PC (1).
El brazo robótico está igualmente asistido por un módulo controlador de motores (9), encargado de controlar dos motores de corriente continua de mediana potencia, diseñado para proporcionar más potencia que los controladores basados en un circuito integrado.
El modo de funcionamiento utilizado para el control de la posición del brazo ha sido el analógico de 0 V-2,5 V-5 V. De este modo, los motores son controlados independientemente por...
Reivindicaciones:
1. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, que estando especialmente concebido para permitir obtener unos resultados de gran fiabilidad, resolución, precisión, y rapidez para determinar la respuesta angular del instrumento de que se trate, así como para inmunizar el ruido electromagnético y lumínico de los experimentos realizados, se caracteriza porque está constituido a partir de un brazo robótico (4), que a través de una serie de circuitos electrónicos está asociado a un PC (1), a un panel de control (3) y a un multímetro digital (2), brazo robótico (4) dotado de medios de fijación del instrumento a caracterizar, habiéndose previsto que el citado PC incorpore un software de programación que mediante un posicionador digital permita una alta precisión para las posiciones del brazo robótico (4), así como calcular el error coseno del dispositivo a través de las medidas recibidas del multímetro (2).
2. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicación 1ª, caracterizado porque en el mismo participan un módulo de comunicación (6) del dispositivo con el multímetro (2), el cual incluye todo el control electrónico del instrumento, un módulo o fuente de alimentación (7), un módulo controlador de motores (9), un módulo controlador de un servomotor (10) para giro de los medios de fijación del instrumento a caracterizar, un módulo (22) de control del panel de mandos (23), un módulo de protección (28), así como un módulo o sistema de autonivelado (34).
3. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicaciones 1ª y 2ª, caracterizado porque el módulo o fuente de alimentación (7) se establece exteriormente a una distancia suficiente del multímetro digital (2) como para poder asegurar que no afecta a las medidas tomadas por inducción de ruidos a través del transformador.
4. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicaciones 1ª y 2ª, caracterizado porque el brazo robótico está asistido por dos motores de corriente continua de mediana potencia.
5. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicaciones 1ª y 2ª, caracterizado porque el módulo del servomotor, al que están asociados los medios de fijación del instrumento a caracterizar, materializados en una pinza (11) asociada a un eje (12) cuyo giro está controlado a través de dicho servomotor (10), comprende un mototorreductor de corriente continua (16), a cuyo eje de salida se asocia un reductor (17), tras el que se establece una barrera óptica (18) para un encóder, así como un disco ranurado del encoder (19), estando dicho eje del reductor (17) asociado a un acoplamiento homocinético (20), tras el que se establece un reductor helicoidal de tornillo sin fin (15), disponiéndose a la salida de dicho reductor un piñón (13) de cadena (14) asociada a una corona (21) a la que es solidario el eje (12) de posicionamiento.
6. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicaciones 1ª y 2ª, caracterizado porque el panel de mandos (23) cuenta con un conmutador (24) de control manual, un interruptor (25) de encendido, testigos luminosos led (26) indicativos de anomalías en el dispositivo, una palanca de control de velocidad (27), un conmutador (28) de selección de la posición de eje, una rueda de ajuste fino manual, así como un pulsador (34) de final de carrera del brazo robótico.
7. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicaciones 1ª y 2ª, caracterizado porque la pinza (11) para alojar al instrumento a caracterizar está asociada a un motorreductor a cuyo eje se le acopla una rueda para realizar un pequeño ajuste fino (31), habiéndose previsto la inclusión de una brida (36) de sujeción ajustable al grosor y longitud de los dispositivos a caracterizar, de forma que se realice una sujección rápida y totalmente eficaz.
8. Sistema robótico para la caracterización de la respuesta angular en instrumentos radiométricos, según reivindicaciones 1ª y 2ª, caracterizado porque el módulo de autonivelación (34) incluye sensores de posición, y está asociado a unos motores de DC que actúan sobre tornillos sin fin de las patas del trípode (35) de sustentación del dispositivo, en orden a regular su altura, habiéndose previsto la incorporación de una escala graduada (37) que en combinación con una aguja indicadora (38) permite controlar los ajustes angulares realizados.
Patentes similares o relacionadas:
Conjunto de cámara y dispositivo electrónico móvil, del 20 de Noviembre de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un conjunto de cámara , caracterizado en que comprende al menos dos conjuntos de lentes que tienen un sensor de imagen , estando un conjunto de lentes configurado […]
Sensor de UV, del 5 de Noviembre de 2019, de Xylem Europe GmbH: Disposición de lámparas con una fuente de radiación UV , un tubo envolvente que rodea la fuente de radiación UV , el cual presenta […]
 Alineación submicrónica de una fibra de monitorización para la realimentación óptica en un sistema de iluminación oftálmica, del 30 de Octubre de 2019, de ALCON, INC: Un sistema oftálmico de endo-iluminación, que comprende:
una fuente de luz configurada para producir un haz de luz ;
un condensador ;
[…]
Alineación submicrónica de una fibra de monitorización para la realimentación óptica en un sistema de iluminación oftálmica, del 30 de Octubre de 2019, de ALCON, INC: Un sistema oftálmico de endo-iluminación, que comprende:
una fuente de luz configurada para producir un haz de luz ;
un condensador ;
[…]
Dispositivo de desinfección del agua y método para la desinfección solar del agua, del 23 de Octubre de 2019, de FUNDACION IMDEA AGUA: Dispositivo de desinfección del agua que comprende: • una botella de plástico destinada a contener agua para ser desinfectada; y […]
Sensor para detectar y localizar fuentes de radiación láser, del 17 de Julio de 2019, de HENSOLDT Sensors GmbH: Sensor para detectar y localizar fuentes de radiación láser con - un detector sensible a la radiación dispuesto en el campo de la imagen de una óptica […]
Aparato para monitorizar el rendimiento del proceso de un sistema de láser con un cable de fibra óptica de potencia, del 11 de Marzo de 2019, de OPTOSKAND AB: Aparato para monitorizar el rendimiento del proceso de un sistema de láser con un cable de fibra óptica de alta potencia, específicamente […]
Microscopio láser de barrido no lineal flexible para la detección tridimensional no invasiva, del 13 de Febrero de 2019, de JenLab GmbH: Microscopio láser de barrido no lineal flexible para la detección tridimensional no invasiva, que contiene al menos una fuente de radiación que genera al menos un haz […]
Dispositivo óptico, banco de pruebas óptico y procedimiento de prueba óptico, del 23 de Enero de 2019, de SPHEREA Test & Services: Banco de pruebas óptico, que comprende un sistema óptico que comprende: - un dispositivo de generación de una onda luminosa plana, denominada […]