REDUCTOR DE VELOCIDAD.
Reductor de velocidad (10) que comprende: un cigüeñal (48) adaptado para girarlo junto con una unidad de accionamiento (16);
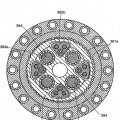
una primera parte excéntrica (48a) prevista en dicho cigüeñal (48); una segunda parte excéntrica (48b) prevista en dicho cigüeñal (48); una tercera parte excéntrica (48c) prevista en dicho cigüeñal (48); un primer engranaje con dientes externos (44a) adaptado para moverlo junto con dicha primera parte excéntrica (48a); un segundo engranaje con dientes externos (44b) adaptado para moverlo junto con dicha segunda parte excéntrica (48b); un tercer engranaje con dientes externos (44c) adaptado para moverlo junto con dicha tercera parte excéntrica (48c); una pluralidad de dientes de perno (31) dispuestos a lo largo de una periferia interna de una carcasa (12) para permitir a uno de dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) engranarse con los mismos; y una unidad de árbol de salida (22) adaptada para girarla junto con dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c), en donde dichas partes excéntricas primera, segunda y tercera (48a, 48b, 48c) se colocan con un desfase dado entre sí en una dirección de rotación de dicho cigüeñal (48), caracterizado porque cada uno de dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) se engrana con menos de la mitad de dicha pluralidad de dientes de perno (31), siendo la suma de los números correspondientes de dientes de perno (31) engranados con dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) igual al número total de dicha pluralidad de dientes de perno (31)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06020035.
Solicitante: NABTESCO CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 9-18 KAIGAN, 1-CHOME, MINATO-KU TOKYO JAPON.
Inventor/es: NOHARA,OSAMU.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Septiembre de 2006.
Clasificación PCT:
- F16H1/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › en los cuales el eje central de la transmisión está situado en el interior de la periferia de un engranaje orbital.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356671_T3.pdf
Fragmento de la descripción:
Campo y antecedentes de la invención
La presente invención se refiere a un reductor de velocidad diseñado para obtener una rotación de salida reducida a partir de una rotación de entrada y para utilizarlo en la reducción de velocidad de un robot, un dispositivo de transporte o un dispositivo giratorio para máquinas de construcción o similares, o un molino de viento.
Hasta ahora, se conoce un tipo de reductor de velocidad de tipo diferencial/ balanceo u oscilante, tal como un reductor de velocidad ciclo, diseñado para hacer girar un engranaje con dientes externos que está montado en una parte excéntrica mientras se engrana con un engranaje con dientes internos, a fin de obtener una rotación de salida reducida a partir de una rotación de entrada. Normalmente, en este reductor de velocidad de tipo diferencial/oscilante, un cigüeñal está provisto de dos partes excéntricas con un desfase dado entre ambas, y dos engranajes con dientes externos, cada uno montado en una parte correspondiente de las partes excéntricas, están engranados con los dientes de perno. Los dientes de perno están dispuestos por una superficie periférica interna de una carcasa a intervalos circunferenciales dados, y el desfase entre las dos partes excéntricas se establece en 180 grados. Así, junto con una rotación del cigüeñal, los dos engranajes con dientes externos giran con el desfase mientras están engranados con los dientes de perno, a fin de obtener una rotación de salida prevista. Cada uno de los dientes de perno que está engranado con los engranajes con dientes externos está adaptado para girar sobre su eje mediante una fuerza recibida de cada uno de los engranajes con dientes externos durante el movimiento anterior. Esto evita que los engranajes con dientes externos se deslicen con respecto a los dientes de perno, a fin de reducir la resistencia a la rotación de los engranajes con dientes externos. Además, los engranajes con dientes externos, cada uno diseñado para estar engranado con los dientes de perno en un intervalo angular de 180 grados, permiten reducir la carga que debe imponerse a cada uno de los dientes de perno.
También se conoce un reductor de velocidad de tipo diferencial/oscilante provisto de tres partes excéntricas y tres engranajes con dientes externos dispuestos en una parte correspondiente de las partes excéntricas, como se describe, por ejemplo, en la publicación de patente japonesa Laid-Open 64-15556. En este reductor de velocidad, las tres partes excéntricas están dispuestas para tener un desfase de 120 grados entre sí.
En un reductor de velocidad de tipo diferencial/oscilante provisto de tres engranajes con dientes externos como se describe en la publicación de patente japonesa Laid-Open 64-15556, si cada uno de los tres engranajes con dientes externos se diseña para engranarse con los dientes de perno en un intervalo angular de 180 grados como en el modo convencional, los tres engranajes con dientes externos se van a engranar con los dientes de perno en un intervalo angular total de 540 grados. Esto significa que algunos de los dientes de perno están al mismo tiempo engranados con dos de los engranajes con dientes externos. Por lo tanto, cada uno de estos dientes de perno recibe simultáneamente fuerzas correspondientes de los dos engranajes con dientes externos, y estas fuerzas son diferentes entre sí en lo que se refiere a dirección y magnitud. En consecuencia, al menos uno de los dos engranajes con dientes externos se va a deslizar con respecto al diente de perno determinado. Al igual que antes, si un reductor de velocidad de tipo diferencial/oscilante se diseña para tener tres engranajes con dientes externos a condición de que un intervalo angular de engrane entre cada uno de los engranajes con dientes externos y los dientes de perno se establezca en 180 grados sin modificaciones, el efecto de permitir a cada uno de los dientes de perno girar sobre su eje a fin de reducir la resistencia a la rotación de los engranajes con dientes externos, como en el reductor de velocidad de tipo diferencial/oscilante provisto de dos engranajes con dientes externos, no se puede obtener para crear un problema relacionado con un aumento de pérdida de rotación del reductor de velocidad de tipo diferencial/oscilante.
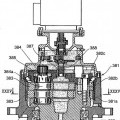
En el reductor de velocidad de tipo diferencial/oscilante convencional descrito en la publicación de patente japonesa Laid-Open 64-15556, cada uno de los tres engranajes con dientes externos se monta sobre un parte excéntrica correspondiente de las tres partes excéntricas del árbol excéntrico a través de un cojinete que comprende un retén adaptado para contener una pluralidad de rodillos (rodamientos). Además, cada uno de los tres engranajes con dientes externos se engrana con un engranaje con dientes internos. Así, cuando se da un par determinado desde un árbol de entrada a los engranajes con dientes externos a través de partes excéntricas correspondientes del árbol excéntrico, los engranajes con dientes externos van a girar mientras están engranados con el engranaje con dientes internos.
En este reductor de velocidad de tipo diferencial/oscilante convencional, las tres partes excéntricas están desfasadas entre sí. Por lo tanto, cuando uno de los cojinetes se conecta desde el lado de uno de los extremos del árbol excéntrico por una dirección axial del árbol excéntrico y luego se monta sobre una parte excéntrica intermedia de las partes excéntricas, es posible que los rodillos de los cojinetes interfieran con la parte excéntrica en el lado del extremo, es decir, la primera parte excéntrica. Para evitar estas interferencias, el retén del cojinete se diseña para tener un movimiento oscilante a fin de permitir que los rodillos se desplacen radialmente hacia afuera. En concreto, antes de que el cojinete se mueva para pasar a través de la primera parte excéntrica, los rodillos del cojinete se desplazan radialmente hacia afuera. A continuación, el cojinete en este estado se mueve para pasar a través de la primera parte excéntrica y montarse en la parte excéntrica intermedia. Esto permite que el engranaje se mueva por el árbol excéntrico y montarlo en la parte excéntrica intermedia con un desfase correspondiente a las partes excéntricas restantes.
Con miras a disminuir el tamaño de un reductor de velocidad de tipo diferencial/oscilante, se reduce el diámetro de cada uno de los engranajes con dientes externos para permitir que el reductor de velocidad de tipo diferencial/oscilante tenga, en algunos casos, un diámetro más pequeño. En estos casos, se incrementa la carga que se impone desde las partes excéntricas del árbol excéntrico sobre los rodillos de los cojinetes lo que tiene la desventaja de disminuir la duración de los rodillos. Como medidas para solucionar este inconveniente, se conoce un cojinete de rodillo denominado de tipo completo. Este cojinete se describe, por ejemplo, en la publicación de patente japonesa Laid-Open 2005-265126.
En el engranaje que se describe en la publicación de patente japonesa Laid-Open 2005-265126, sólo una pluralidad de rodillos se disponen por una superficie periférica externa de una parte excéntrica sin interponer ningún otro elemento entre medias. Esto hace que sea posible aumentar el número de rodillos que se van a disponer alrededor de la parte excéntrica, con el fin de dispersar aún más una carga que se va a imponer desde la parte excéntrica sobre cada uno de los rodillos para resolver el inconveniente anterior. Además, el cojinete que se describe en la publicación de patente japonesa Laid-Open 2005265126 está provisto de una pluralidad de brazos de presión para presionar cada uno de la pluralidad de rodillos dispuestos alrededor de la parte excéntrica, hacia dentro desde un lado externo de los rodillos. Es decir, los brazos de presión sujetan los rodillos para que no se salgan de la parte excéntrica.
Sin embargo, en el reductor de velocidad de tipo diferencial/oscilante convencional que se describe en la publicación de patente japonesa Laid-Open 64-15556, el retén del cojinete que se va a montar en la parte excéntrica intermedia está diseñado para tener un movimiento oscilante, como ya se ha mencionado. Por lo tanto, incluso después de que el cojinete se coloca en la parte excéntrica intermedia, los rodillos del cojinete van a oscilar y ocasionan la desventaja de la dificultad de colocar los rodillos alrededor de la parte excéntrica intermedia a intervalos regulares.
Como medidas para solucionar este inconveniente, se contempla que sólo se forme una parte excéntrica intermedia de las tres partes excéntricas para tener un diámetro mayor a fin de absorber movimientos... [Seguir leyendo]
Reivindicaciones:
1. Reductor de velocidad (10) que comprende: un cigüeñal (48) adaptado para girarlo junto con una unidad de accionamiento (16); una primera parte excéntrica (48a) prevista en dicho cigüeñal (48); una segunda parte excéntrica (48b) prevista en dicho cigüeñal (48); una tercera parte excéntrica (48c) prevista en dicho cigüeñal (48); un primer engranaje con dientes externos (44a) adaptado para moverlo junto con dicha primera
parte excéntrica (48a); un segundo engranaje con dientes externos (44b) adaptado para moverlo junto con dicha segunda parte excéntrica (48b); un tercer engranaje con dientes externos (44c) adaptado para moverlo junto con dicha tercera parte excéntrica (48c); una pluralidad de dientes de perno (31) dispuestos a lo largo de una periferia interna de una carcasa (12) para permitir a uno de dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) engranarse con los mismos; y una unidad de árbol de salida (22) adaptada para girarla junto con dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c), en donde dichas partes excéntricas primera, segunda y tercera (48a, 48b, 48c) se colocan con un desfase dado entre sí en una dirección de rotación de dicho cigüeñal (48),
caracterizado porque
cada uno de dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) se engrana con menos de la mitad de dicha pluralidad de dientes de perno (31),
siendo la suma de los números correspondientes de dientes de perno (31) engranados con dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) igual al número total de dicha pluralidad de dientes de perno (31).
2. Reductor de velocidad (10) según la reivindicación 1, en donde:
el número total de dicha pluralidad de dientes de perno (13) es un múltiplo entero de tres;
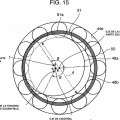
dichas partes excéntricas primera, segunda y tercera (48a, 48b, 48c) están dispuestas para tener una desfase de 120 grados entre sí; y
dichos engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) se engranan, respectivamente, con las terceras partes primera, segunda y tercera de dicha pluralidad de dientes de perno (31).
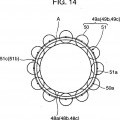
3. Reductor de velocidad (10) según la reivindicación 1 ó 2, en donde al menos uno de los engranajes con dientes externos primero, segundo y tercero (44a, 44b, 44c) tiene dientes externos (44d) formados cada uno de manera que una longitud de una altura de cabeza (61) es menor que la de un pie de diente (62).
Patentes similares o relacionadas:
 Sistema de frenado asistido por engranaje con interfaz elíptica, del 30 de Octubre de 2019, de THE BOEING COMPANY: Un modulo de freno que comprende:
un freno para controlar selectivamente una accion de frenado;
un rotor de freno anular que se aparea con el freno, incluyendo […]
Sistema de frenado asistido por engranaje con interfaz elíptica, del 30 de Octubre de 2019, de THE BOEING COMPANY: Un modulo de freno que comprende:
un freno para controlar selectivamente una accion de frenado;
un rotor de freno anular que se aparea con el freno, incluyendo […]
Procedimiento para la fabricación de una corona con dentado interno, así como procedimiento para la fabricación o reparación de un engranaje, del 7 de Agosto de 2019, de Flender GmbH: Procedimiento para la fabricacion de una corona con dentado interno que debe montarse de manera fija a la caja en una caja de engranaje de un engranaje planetario, […]
Transmisión, del 18 de Abril de 2018, de SPINEA S.R.O.: Transmisión con un cuerpo de base tipo cilindro hueco que presenta un dentado interior , así como un eje de giro (40a), con lados […]
Motor-compresor poli-rotórico, del 20 de Junio de 2017, de ORELLANA HURTADO, DIEGO: Motor-compresor celeste poli-rotórico que regula el caudal del aire o gas comprimido de forma continua, desde cero hasta un valor máximo. Para ello […]
Aparato de cambio de velocidad con gran relación, del 22 de Marzo de 2017, de Lin, Pan-Chien: Un aparato de cambio de velocidad para cambiar una velocidad de entrada en un árbol de entrada a una velocidad de salida en un árbol (46, […]
 Dispositivo de desaceleración, del 24 de Febrero de 2016, de NABTESCO CORPORATION: Una transmisión por engranajes , que comprende:
una primera unidad reductora (100a, 200a) de tipo oscilante excéntrico, y
una […]
Dispositivo de desaceleración, del 24 de Febrero de 2016, de NABTESCO CORPORATION: Una transmisión por engranajes , que comprende:
una primera unidad reductora (100a, 200a) de tipo oscilante excéntrico, y
una […]
 DISPOSITIVO PARA MODIFICAR PAR, del 31 de Diciembre de 2014, de ALCIBAR ASPURU, Jose Antonio: Dispositivo para modificar par que comprende un eje de salida y un eje de entrada que está conectado con un plato de arrastre que a su […]
DISPOSITIVO PARA MODIFICAR PAR, del 31 de Diciembre de 2014, de ALCIBAR ASPURU, Jose Antonio: Dispositivo para modificar par que comprende un eje de salida y un eje de entrada que está conectado con un plato de arrastre que a su […]
 Transmisión, del 13 de Noviembre de 2013, de SPINEA S.R.O.: Transmisión con un cuerpo de base del tipo de cilindro hueco, que presenta un dentado interior así como un eje de giro (40a), con lados frontales , […]
Transmisión, del 13 de Noviembre de 2013, de SPINEA S.R.O.: Transmisión con un cuerpo de base del tipo de cilindro hueco, que presenta un dentado interior así como un eje de giro (40a), con lados frontales , […]