Robot que sigue la pared.
Sección de la CIP Necesidades corrientes de la vida
(26/02/2020). Solicitante/s: IROBOT CORPORATION. Clasificación: A47L9/00.
Un método para controlar un robot de limpieza que tiene un paño de limpieza , que comprende:
ejecutar un comportamiento de seguimiento de pared manteniendo un contacto continuo entre una superficie de pared y el paño de limpieza del robot mientras se mantiene un ángulo pequeño entre el robot y la superficie de pared,
caracterizado por:
utilizar un sensor del robot para permitir un contacto continuo entre el paño de limpieza del robot y la superficie de pared, mientras el robot rastrea la superficie de pared.
PDF original: ES-2793599_T3.pdf
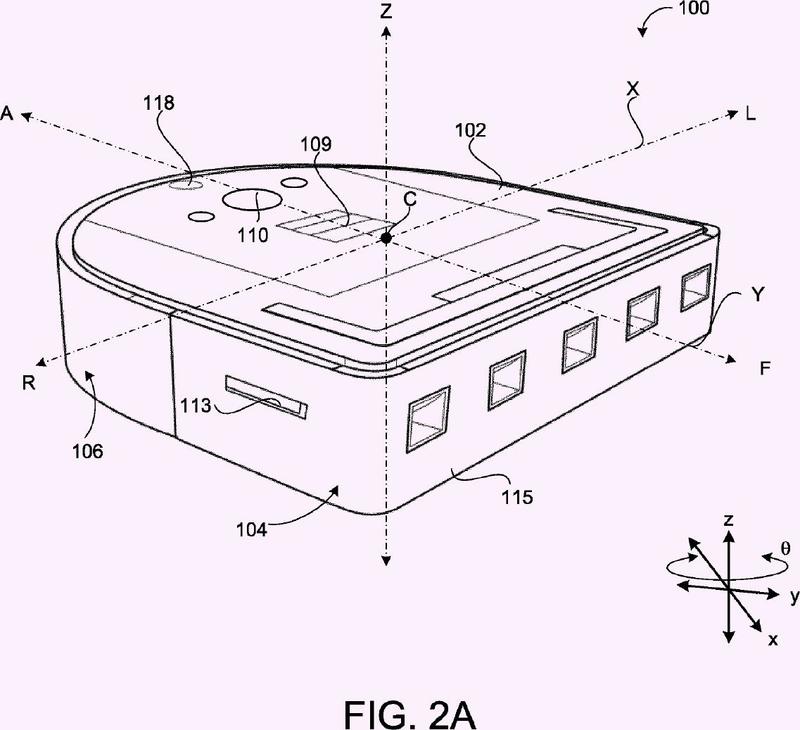
Movimiento restrictivo de un robot móvil.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(24/07/2019). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Clasificación: G05D1/02, B25J9/16, B25J5/00.
Un robot que comprende:
un cuerpo que se puede mover en relación con una superficie ;
uno o más dispositivos de medición dentro del cuerpo para emitir información basándose en una orientación del cuerpo en una ubicación inicial en la superficie ; y
un controlador dentro del cuerpo para determinar la orientación del cuerpo basándose en la información, y
caracterizado por que el controlador está configurado además para restringir el movimiento del cuerpo a un área impidiendo el movimiento del cuerpo más allá de una barrera virtual que define un límite que el robot no puede cruzar que es creado basándose en la orientación del cuerpo y la ubicación inicial, y
el controlador está configurado además para almacenar la barrera virtual que ha de ser utilizada subsiguientemente para restringir el movimiento del robot.
PDF original: ES-2746498_T3.pdf
Limpieza de pisos autónoma con almohadilla extraíble.
(04/06/2019) Un robot de limpieza de pisos autónomo , que comprende:
un cuerpo del robot ;
un controlador apoyado en el cuerpo del robot ;
un accionamiento que soporta el cuerpo del robot para maniobrar el robot a través de una superficie del piso en respuesta a las órdenes del controlador ;
un soporte de almohadillas unido a la parte inferior del cuerpo del robot y para sostener una almohadilla de limpieza extraíble durante el funcionamiento del robot de limpieza , comprendiendo la almohadilla de limpieza extraíble una placa de montaje y una superficie de montaje , estando unida la placa de montaje a la superficie de montaje ; y
caracterizado en que el robot comprende, además:
un sensor de almohadillas para detectar una característica de identificación…
Limpieza autónoma de suelos con una almohadilla extraíble.
(30/04/2019) Un robot autónomo de limpieza de suelos, que comprende:
un cuerpo de robot que define una dirección de accionamiento hacia delante;
un controlador soportado por el cuerpo de robot;
un accionamiento que soporta el cuerpo de robot y configurado para maniobrar el robot a través de una superficie en respuesta a comando del controlador;
un soporte de almohadilla dispuesto en una parte inferior del cuerpo de robot y configurado para retener una almohadilla de limpieza extraíble (120; 600; 700; 800A-800F) durante el funcionamiento del robot de limpieza; y caracterizado por que el robot autónomo de limpieza de suelos comprende además:
un sensor de almohadilla dispuesto para detectar una característica de una almohadilla de limpieza sostenida…
Robot que sigue la pared.
(27/02/2019) Un robot que comprende:
un cuerpo que puede moverse con respecto a una superficie ;
un parachoques montado en el cuerpo para permitir el movimiento del parachoques con respecto al cuerpo, pudiendo moverse el parachoques entre una posición no comprimida con respecto al cuerpo y una posición comprimida con respecto al cuerpo;
un primer sensor (112R) para producir una primera señal en respuesta al movimiento del parachoques con respecto al cuerpo provocado por el contacto entre el parachoques y la superficie, variando linealmente la primera señal con el movimiento del parachoques con respecto al cuerpo; y un controlador configurado para controlar el movimiento del cuerpo para hacer que el cuerpo rastree la superficie basándose en un valor (X), basándose…
Limpieza de pisos autónoma con almohadilla extraíble.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(20/02/2019). Solicitante/s: IROBOT CORPORATION. Clasificación: A47L11/40, A47L9/28, A47L13/24, A47L13/16, A47L9/06, B08B7/04, B08B1/00, A47L11/24.
Un conjunto de almohadillas de limpieza de robots autónomos (120; 800E; 1000; 1200; 300) de diferentes tipos, comprendiendo cada una de las cuales:
un cuerpo de almohadilla que tiene superficies amplias opuestas, que incluyen una superficie de limpieza y una superficie de montaje;
una característica de identificación del tipo de almohadilla indicativa de un tipo de almohadilla de limpieza; y
una placa de montaje (802E; 1006; 1206; 1306) asegurada a través de la superficie de montaje del cuerpo de la almohadilla y que comprende un recorte (803E, 1012, 1212, 1305) que define al menos en parte la característica de identificación del tipo de almohadilla , habilitando la placa de montaje un sensor de almohadilla de un robot , cuando la almohadilla de limpieza se monta en el robot, para detectar la característica de identificación del tipo de almohadilla.
PDF original: ES-2726712_T3.pdf
{kind=link}