Perno de sellado, sistema de cierre seguro y método de cierre seguro/apertura.
(22/07/2020) Un perno de sellado para sellar un contenedor , en donde el perno de sellado está adaptado para cooperar, durante el uso, con un dispositivo de cierre seguro para cerrar de manera segura una tapa del contenedor asegurándola a un cuerpo de contenedor del contenedor , en donde el dispositivo de cierre seguro comprende una varilla de cierre seguro dispuesta para moverse horizontalmente en relación a la tapa del contenedor, en donde dicho perno de sellado comprende:
una parte superior, una parte inferior y una varilla axial que conecta las partes superior e inferior , en donde la parte superior, la parte inferior y la varilla axial están situadas de manera coaxial alrededor de un eje;
…
Sistema de sellado y método para instalar un sistema de sellado.
(03/06/2020) Sistema de sellado para contenedores nucleares, que sella una tapa de contenedor de un contenedor nuclear a un cuerpo de contenedor de dicho contenedor nuclear, dicho sistema de sellado comprende:
al menos tres etiquetas adaptadas para ser montadas en uno de dicha tapa de contenedor o dicho cuerpo de contenedor , cada etiqueta tiene un único ID y comprende un primer transceptor de RF configurado para trasmitir, en uso, una respectiva primera señal de RF;
al menos tres anclajes adaptados para ser montados en el otro de dicha tapa de contenedor o dicho cuerpo de contenedor , cada anclaje tiene un único ID y comprende un segundo transceptor de RF configurado para recibir, en uso,…
Perno de sellado y método de instalación de un perno de sellado.
(27/11/2019) Un perno de sellado para sellar una tapa del contenedor a un cuerpo del contenedor, comprendiendo dicho perno de sellado:
un cabezal de sellado adaptado para montarse en dicha tapa del contenedor;
un taco de sellado adaptado para ser montado en dicho cuerpo del contenedor;
un pasador que conecta dicho cabezal de sellado a dicho taco de sellado, caracterizado por que dicho perno de sellado comprende, además un conductor , dispuesto a través de un paso transversal en dicho pasador,
un miembro resiliente
dispuesto para polarizar el pasador en una primera posición, en la que el el conductor está comprimido, en el que el pasador es móvil contra la polarización del miembro resiliente en una segunda posición mediante…
Procedimiento para la determinación de parámetros de rejilla óptimos para la producción de una rejilla de difracción para un espectrómetro VUV.
(20/11/2019) Procedimiento para la determinación de un conjunto de parámetros de rejilla para la producción holográfica de una rejilla de difracción que presenta un sustrato de rejilla toroidal, para una configuración de espectrómetro VUV,
en el que
- el rango de longitudes de onda que se va a observar y
- la dimensión del detector están predefinidos,
y en el que el conjunto de parámetros de rejilla, además de la longitud de onda del láser lL predeterminada para la iluminación holográfica, comprende
- el radio menor y mayor del sustrato de rejilla toroidal (ρ y R),
- las dos distancias de los dos…
Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas.
(08/11/2018) Sistema robótico médico para llevar a cabo procedimientos médicos, que comprende un manipulador de robot para la manipulación asistida por robot de un instrumento médico , en el que dicho manipulador de robot comprende:
una base ;
un brazo de manipulador, que tiene una parte esencialmente vertical soportada por dicha base y una parte esencialmente horizontal soportada por dicha parte vertical;
una muñeca de manipulador, soportada por dicho brazo del manipulador; y
una unidad efectora , soportada por dicha muñeca del manipulador y configurada para sujetar un instrumento médico;
dicho brazo del manipulador tiene una configuración cinemática PRP cilíndrica, que tiene, en secuencia…
Perno de cierre hermético y sistema de cierre hermético.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(29/06/2016). Inventor/es: SIRONI, MARCO, LITTMANN,FRANCOIS. Clasificación: B65D55/02, G21F5/12.
Un perno de cierre hermético para cerrar herméticamente una tapa de recipiente con un cuerpo de recipiente, comprendiendo dicho perno de cierre hermético:
una cabeza de cierre hermético que ha de ser montada en dicha tapa de recipiente;
un espárrago de cierre hermético que ha de ser montado en dicho cuerpo de recipiente;
un pasador que conecta dicha cabeza de cierre hermético con dicho espárrago de cierre hermético,
caracterizado por un cable de ruptura dispuesto a través de un paso transversal en dicho pasador, en donde dicho cable de ruptura es una fibra óptica, estando dispuesto dicho cable de ruptura de tal manera que cualquier movimiento rotacional o de traslación de dicho pasador con respecto a dicha cabeza de cierre hermético y/o dicho espárrago de cierre hermético hace que dicho cable de ruptura se rompa.
PDF original: ES-2648600_T3.pdf
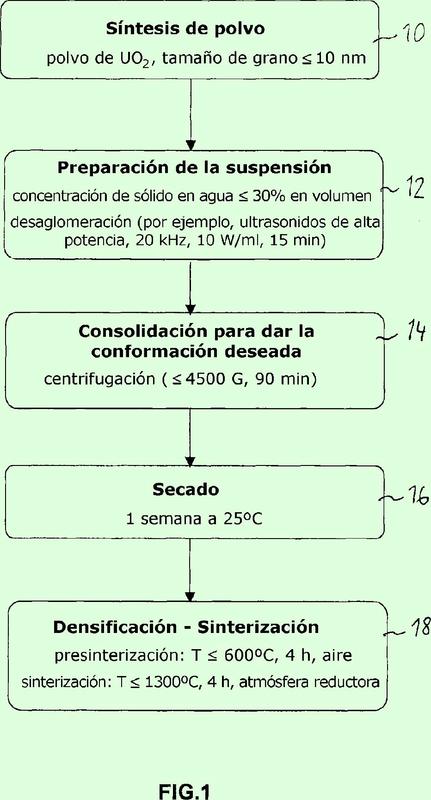
Pastillas de combustible nuclear de alta combustión.
Sección de la CIP Física
(04/01/2016). Ver ilustración. Inventor/es: SPINO,JOSE-LUIS,DR, SANTA CRUZ,HERNAN. Clasificación: G21C3/62, G21C21/02.
Pastilla de combustible nuclear sinterizada, en particular para su utilización en reactores nucleares PWR o BWR, caracterizada por que dicha pastilla consiste esencialmente en granos que presentan un tamaño inferior a 500 nm.
PDF original: ES-2555517_T3.pdf
Estimación de fuerza para un sistema de cirugía robotizada mínimamente invasiva.
(08/07/2015) Sistema médico mínimamente invasivo que comprende un manipulador que presenta una unidad efectora provista de un sensor de fuerza/par de 6 grados de libertad (6-DOF) y configurada para sujetar un instrumento mínimamente invasivo que presenta un primer extremo montado en dicha unidad efectora y un segundo extremo situado más allá de un fulcro externo que limita dicho instrumento en movimiento, comprendiendo dicho sistema un dispositivo informático programable, caracterizado por que dicho dispositivo informático está programado para:
determinar una posición de dicho instrumento con respecto a dicho fulcro;
tratar las mediciones realizadas mediante el sensor de fuerza/par…
Estimación de fuerza para un sistema de cirugía robotizada mínimamente invasiva.
(18/02/2015) Sistema médico mínimamente invasivo que comprende un manipulador robotizado que tiene una unidad efectora equipada con un sensor de fuerza/par de 6 grados de libertad (6 DOF) , el cual tiene un sistema de referencia (X, Y, Z) de sensor con tres ejes que son ortogonales entre sí y está configurado para sujetar un instrumento mínimamente invasivo , presentando dicho instrumento , cuando es sujetado por dicha unidad efectora , un primer extremo montado en dicha unidad efectora, un segundo extremo situado más allá de un fulcro externo que limita el movimiento de dicho instrumento y un árbol de instrumento con un eje longitudinal que es colineal con un eje de instrumento…
Recuento de multiplicidad neutrónica.
(09/10/2013) Procedimiento de recuento de neutrones, que comprende:
recibir una secuencia de impulsos desde un detector de neutrones;
para cada impulso de dicha secuencia de impulsos:
establecer dicho impulso como impulso de activación que activa una puerta,
asignar dicho impulso de activación a una categoría de multiplicidad que corresponde a la multiplicidad deimpulsos dentro de dicha puerta,
determinar unos intervalos de activación a anterior desde dicho impulso de activación hasta impulsos quepreceden a dicho impulso de activación dentro de un rango más largo que un tiempo muerto de dichodetector de neutrones;
para cada categoría de multiplicidad:
determinar el número de impulsos de activación asignados a dicha categoría de multiplicidad;
construir, basándose en los intervalos…
SISTEMA QUIRÚRGICO ROBÓTICO PARA REALIZAR PROCEDIMIENTOS MÉDICOS MINIMAMENTE INVASIVOS.
(30/09/2011) Sistema quirúrgico robótico para realizar procedimientos médicos mínimamente invasivos que comprende un manipulador de robot para el manejo asistido por robot de un instrumento laparoscópico , presentando dicho manipulador de robot un brazo de manipulador , una muñeca de manipulador soportada por dicho brazo de manipulador y una unidad de efector soportada por dicha muñeca de manipulador, en el que: dicho brazo de manipulador proporciona tres grados de libertad por medio de una primera junta (J1), una segunda junta (J2) y una tercera junta (J3), presentando cada una un actuador , para posicionar robóticamente dicha muñeca; dicha muñeca…
ACTIVACION Y PRODUCCION DE PARTICULAS RADIOMARCADAS.
(29/04/2010) Partícula radiomarcada para la utilización radiofarmacéutica interna, tal como una nanopartícula o micropartícula, que comprende tanto radionúclidos emisores ß- adecuados para la terapia del cáncer como radionúclidos emisores ß+ adecuados para la formación de imágenes médicas nuclear
{kind=link}