IMPLEMENTO DE AGARRE PARA MULETAS, ANDADORES Y APARATOS DE APOYO SIMILARES.
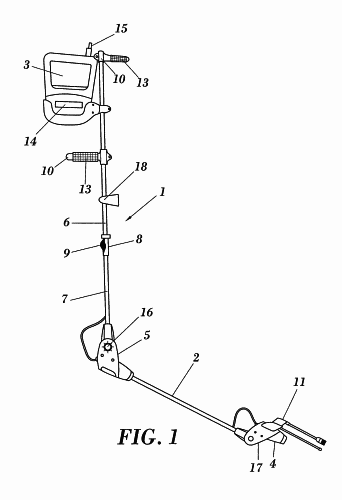
(16/10/2017) 1. Implemento de agarre para muletas, andadores y aparatos de apoyo similares, caracterizado por comprender una guía , que se dispone verticalmente adosada a la pata de un aparato de apoyo (A), por la que discurren dos brazos, superior e inferior (3'), asociados a respectivas correderas, superior e inferior (4'), vinculadas entre sí con un resorte y roscadas a una varilla roscada que va insertada longitudinalmente a lo largo del interior de la guía y que está vinculada a un mecanismo accionador que determina su giro dentro de la guía en un sentido u otro, provocando el ascenso y descenso en la guía del conjunto de correderas (4, 4') y brazos (3, 3'), estando dichos brazos (3, 3') dispuestos de manera que dimanan perpendiculares a la guía ,…
{kind=link}