CIP-2021 : G01S 13/66 : Sistemas de seguimiento por radar; Sistemas análogos.
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/66[1] › Sistemas de seguimiento por radar; Sistemas análogos.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/66 · Sistemas de seguimiento por radar; Sistemas análogos.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento y dispositivo para controlar la posición de una plataforma pivotable alrededor de tres ejes provista de un dispositivo de seguimiento de objetivos.
(20/11/2019) Procedimiento para controlar la posición de una plataforma sensible a la vibración provista de un dispositivo de seguimiento de objetivos, pivotable alrededor de tres ejes espaciales con las etapas de:
a) determinar la posición real de la plataforma ;
b) determinar una desviación de la posición real de una posición deseada para la plataforma , en la que un dispositivo de detección de objetivos previsto en la plataforma apunta a un objetivo (T) situado en una posición de destino (PT);
c) reconstruir la posición de destino (PT) absoluta del objetivo (T) a partir de la posición real de la plataforma determinada en la etapa a) y la desviación determinada en la etapa b);
d) estimar una trayectoria…
Método de control de tiro para defensa antiaérea basada en armas de fuego.
(27/03/2019). Solicitante/s: BAE SYSTEMS BOFORS AB. Inventor/es: WÄLBERG,KJELL.
Método de control de tiro de armas contra blancos aéreos cuando se dirigen hacia un objeto de protección, en el que se conoce la posición del objeto de protección, que comprende las siguientes etapas de método:
medir la posición del blanco aéreo,
estimar la posición del blanco aéreo,
estimar la velocidad del blanco aéreo,
caracterizado por las etapas adicionales de:
aplicar un modelo de la ley de guiado de blanco aéreo,
calcular las aceleraciones que debe aplicar el blanco aéreo con el fin de acertar en el objeto de protección,
predecir la trayectoria futura del blanco aéreo basándose en la posición del objeto de protección, la posición estimada del blanco aéreo, la velocidad estimada del blanco aéreo, la aceleración calculada del blanco aéreo,
calcular puntos de mira a lo largo de la trayectoria predicha, y
dirigir las armas hacia los puntos de mira.
PDF original: ES-2724325_T3.pdf
Procedimiento para enfocar un haz de alta energía en un punto de referencia en la superficie de un objeto volador en vuelo.
(30/11/2016) Procedimiento para enfocar un haz de una fuente de radiación de alta energía , particularmente un haz láser, en un punto de referencia (HP) en la superficie de un objeto volador en vuelo , que incluye las etapas siguientes:
a) Grabación de un número de imágenes bidimensionales consecutivas del objeto volador en vuelo con un procedimiento de imagen que utiliza un dispositivo de adquisición de imágenes ;
b) Determinación de la trayectoria (T) de la ruta de vuelo del objeto volador como una secuencia de puntos de recorrido tridimensionales;
c) Determinación simultáneamente de la línea del ángulo de visión entre el dispositivo de adquisición de…
Sistema de radar digital asistido por fotones.
(30/11/2016) Un sistema de radar digital asistido por fotones que comprende:
- una antena de barrido electrónico activa ;
- una sección de transmisión conectada a la antena y configurada para generar y transmitir señales de RF (SF1) a través de la antena ; y
- una sección de recepción conectada a la antena y configurada para recibir y procesar señales eléctricas analógicas (SE2) asociadas a señales de RF recibidas (SF2);
comprendiendo la sección de transmisión :
- un generador de formas de onda configurado para generar una señal de modulación eléctrica en la forma de una onda pulsada (SWG); y
- un modulador configurado para recibir una portadora de transmisión eléctrica (STALO) y la señal eléctrica de modulación (SWG) y modular la portadora de transmisión (STALO) mediante la señal de modulación (SWG), generando…
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad.
(16/02/2016). Ver ilustración. Solicitante/s: KAPSCH TRAFFICCOM AG. Inventor/es: Abl,Alexander.
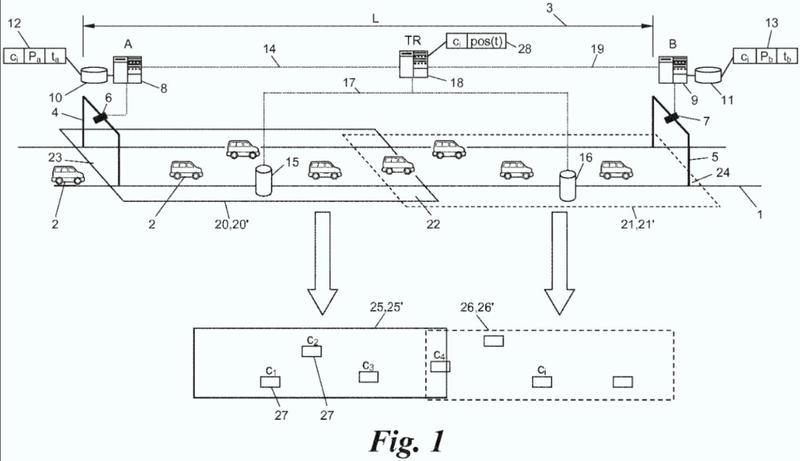
Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que comprende:
registrar el tiempo de entrada (ta) de un vehículo en la entrada , generar una identificación de objeto (ci) para el vehículo inequívoca e independiente de la identidad real del vehículo y almacenar el tiempo de entrada (ta) bajo la identificación de objeto (ci),
seguir el movimiento del vehículo que se referencia a este respecto de manera continua mediante la identificación de objeto (ci) y durante todo el tramo con ayuda de una disposición de sensores (TR), registrar el tiempo de salida (tb) del vehículo referenciado mediante la identificación de objeto (ci) en la salida , y
si una comparación del tiempo de salida (tb) registrado con el tiempo de entrada (ta) almacenado indica una velocidad que supera un valor umbral (s): registrar una imagen de salida (Pb) del vehículo en la salida.
PDF original: ES-2559827_T3.pdf
Unidad de campo de radar para sistema que evita la colisión entre una aeronave y un obstáculo.
(04/06/2014) Una unidad de campo para detectar y avisar a una aeronave acerca de un obstáculo, comprendiendo la unidad de campo una unidad central de procesamiento y un sistema de radar para la detección con radar de una aeronave en un área de cobertura de radar:
- comprendiendo el sistema de radar:
- una antena de radar que comprende una pluralidad de paneles de antena , comprendiendo cada uno una pluralidad de elementos de antena radiantes , estando dispuestos los paneles de antena como los lados de un octógono; y
- componentes electrónicos de radar en comunicación con la antena de radar, comprendiendo los componentes electrónicos…
SISTEMA GONIOMETRICO DE MINISENSORES DOPPLER EN REDES PARA LA VIGILANCIA DE PERIMETROS.
(03/12/2010) Dispositivo de detección de movimientos de entrada en una zona geográfica o de salida de esta zona, caracterizado porque comprende: - una pluralidad de sensores electromagnéticos individuales autónomos, dispuestos en el perímetro de la zona vigilada y dispuestos de manera que la zona del espacio abarcada por cada detector cubre parcialmente la zona del espacio abarcada por los sensores vecinos, - una unidad central situada cerca del perímetro que rodea la zona vigilada, realizando cada sensor una medición de la posición angular y de la velocidad de cualquier intruso presente en la zona que cubre; retransmitiéndose estas mediciones a la unidad central desde el sensor que haya detectado al intruso, mediante transmisiones sucesivas de estas mediciones desde un sensor al sensor vecino…
SISTEMA DE SEGUIMIENTO DEL BLANCO.
(01/11/1993). Solicitante/s: OERLIKON CONTRAVES AG. Inventor/es: PICCOLRUAZ, HEINZ.
UN SISTEMA DE SEGUIMIENTO DEL BLANCO CON GRAN SEGURIDAD DE SEGUIMIENTO Y MINIMA SERVOCARGA, COMPUESTO POR VARIOS GRUPOS (D1, D2, W1, W2, W3) DE SENSORES DE SEGUIMIENTO CON DIFERENTES TIEMPOS DE SEÑALES Y LAS CORRESPONDIENTES LINEAS DE MIRA DE GRUPO A GRUPO: - UN SERVO (S) QUE CONDUCE A ESTAS LINEAS DE MIRA AL BLANCO; - UN ESTIMADOR DEL BLANCO (ZE) QUE CALCULA EL MOVIMIENTO DEL BLANCO; - UN SERVO-ESTIMADOR (SE) QUE CALCULA EL MOVIMIENTO DEL SERVO (S) Y - UN REGULADOR (R) QUE DIRIGE AL SERVO (S) Y AL SERVO-ESTIMADOR (SE) A LA MISMA VEZ, PASANDO LA DIFERENCIA VECTORAL (EZ - ES) DE AMBOS CALCULOS MENCIONADOS (EZ Y ES) A CERO. LAS SEÑALES VECTORIALES (AI,I=1,2,3,) DE LOS GRUPOS SENSORES ANGULARES (WI) SE TRANSFORMAN EN UNA SEÑAL COMBINADA (MI=MAI.AI) CON LOS MULTIPLICADORES (MVI) CON LAS MATRICES (MAI), PASANDO AL SERVO (S) Y AL SERVO-ESTIMADOR (SE) DIRECTAMENTE, COMO SI UNICAMENTE EXISTIERA UN SENSOR ANGULAR CON LA SEÑAL COMBINADA (MI).
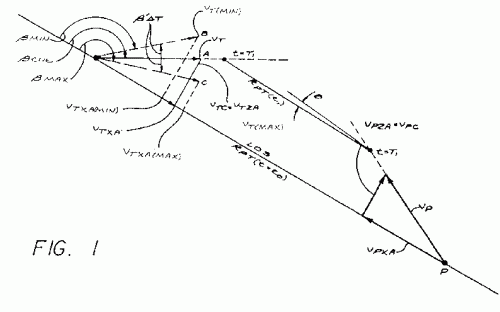
METODO Y APARATO PARA DETERMINAR LA POSICION Y VELOCIDAD DE UN BLANCO EN UN ESPACIO INERCIAL.
(01/05/1990). Ver ilustración. Solicitante/s: HUGHES AIRCRAFT COMPANY. Inventor/es: WOOLLEY, RICHARD L.
METODO Y APARATO PARA DETERMINAR LA POSICION Y VELOCIDAD DE UN BLANCO EN UN ESPACIO INTERCIAL, INCLUYENDO EL METODO LOS PASOS DE: A) SEGUIR AL BLANCO Y PROPORCIONAR TRES COMPONENTES ORTOGONALES DE VELOCIDAD EN EL ESPACIO INERCIAL; B) COMPUTAR LA VELOCIDAD ESCALAR VT DEL BLANCO EN UN MARCO INERCIAL DE REFERENCIA OBTENIENDO LA RAIZ CUADRADA DE LA SUMA DE LOS CUADRADOS DE LAS COMPONENTES ORTOGONALES DE VELOCIDAD; Y C) COMPUTAR EL ANGULO DE ASPECTO DEL BLANCO CON RESPECTO A UNA LINEA DE MIRA TRAZADA A UNA PLATAFORMA COMO UNA FUNCION SINUSOIDAL INVERSA DE LA RELACION ENTRE UNA DE DICHAS COMPONENTES ORTOGONALES Y VT, CUANDO ESTAN DISPONIBLES TALES DATOS DE SEGUIMIENTO; Y, EN CASO CONTRARIO, D) ESTIMAR UNA MANIOBRA REAL DEL BLANCO A FIN DE DESARROLLAR UNA ZONA DE INCERTIDUMBRE MINIMA EMPLEANDO UNA SUPUESTA ACELERACION LATERAL DEL BLANCO DEL TIPO MAS DESFAVORABLE. APLICACION A SISTEMAS DE GUIA Y SEGUIMIENTO.
PERFECCIONAMIENTOS APORTADOS A LOS RECEPTORES AEROTRANSPORTADOS DE RADAR DE TELEMETRIA.
(01/05/1975). Solicitante/s: ELECTRONIQUE MARCEL DASSAULT.
Resumen no disponible.
{kind=link}
{kind=link}