CIP-2021 : B25J 15/06 : con medios de retención magnéticos o que funcionan por succión.
CIP-2021 › B › B25 › B25J › B25J 15/00 › B25J 15/06[1] › con medios de retención magnéticos o que funcionan por succión.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 15/00 Cabezas de aprehensión.
B25J 15/06 · con medios de retención magnéticos o que funcionan por succión.
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO, SISTEMA Y MÉTODO DE FIJACIÓN CONTROLABLE MEDIANTE UN BRAZO MECÁNICO.
(02/04/2020). Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: GARCIA CEREZO,ALFONSO JOSE, MUÑOZ RAMIREZ,ANTONIO JOSE, GANDARIAS PALACIOS,Juan Manuel, PASTOR MARTÍN,Francisco, BALLESTEROS GÓMEZ,Joaquín, GOMEZ GABRIEL,Jesús Manuel.
Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles unidas entre sí mediante un eje y mediante al menos un elemento elástico . Las palancas abatibles están configuradas para rotar respecto al eje entre una primera posición y una segunda posición al ser presionadas por el brazo mecánico . En la primera posición, el elemento elástico se encuentra a un primer lado del eje , de modo que la tensión de dicho elemento elástico presiona las palancas abatibles contra el brazo mecánico . En la segunda posición, el elemento elástico se encuentra a un segundo lado del eje , de modo que la tensión de dicho elemento elástico mantiene las palancas abatibles en dicha segunda posición, sin contactar el brazo mecánico , y unos medios de sujeción fijan el dispositivo a un cuerpo.
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares.
(01/04/2020) Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en la que está dispuesto al menos un brazo de manipulación , de una cámara de tratamiento en la que se coloca al menos una estación para el tratamiento de al menos un recipiente , enfrentándose dicho al menos un brazo de manipulación a dicha al menos una estación , que también comprende un elemento intermedio que comprende, en al menos una parte del mismo, al menos un primer miembro de acoplamiento de forma y tamaño conjugados con los de al menos un segundo miembro de acoplamiento integral a dicha estación y con los de un tercer miembro de acoplamiento integral a dicho brazo de manipulación para que pueda asociarse operativamente alternativamente a dicha estación y a dicho…
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico.
(27/03/2020). Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: GARCIA CEREZO,ALFONSO JOSE, GOMEZ DE GABRIEL,JESUS MANUEL, MUÑOZ RAMIREZ,ANTONIO JOSE, GANDARIAS PALACIOS,Juan Manuel, PASTOR MARTÍN,Francisco, BALLESTEROS GÓMEZ,Joaquín.
Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles unidas entre sí mediante un eje y mediante al menos un elemento elástico . Las palancas abatibles están configuradas para rotar respecto al eje entre una primera posición y una segunda posición al ser presionadas por el brazo mecánico . En la primera posición, el elemento elástico se encuentra a un primer lado del eje , de modo que la tensión de dicho elemento elástico presiona las palancas abatibles contra el brazo mecánico . En la segunda posición, el elemento elástico se encuentra a un segundo lado del eje , de modo que la tensión de dicho elemento elástico mantiene las palancas abatibles en dicha segunda posición, sin contactar el brazo mecánico , y unos medios de sujeción fijan el dispositivo a un cuerpo.
PDF original: ES-2750880_A1.pdf
Sistema de laminado automatizado de chapas y método de colocación.
(19/02/2020) Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende:
un robot ;
un efector terminal sobre el robot para la elevación de una chapa desde un kit de chapas y la colocación de la chapa en una localización preseleccionada, comprendiendo el efector terminal:
un escáner ;
una cámara ;
un agarrador ; y
un sensor de fuerza ;
una cámara fija para grabación de la posición de la chapa sobre el efector terminal ; y
un controlador conectado con el robot y el efector terminal ,
en el que el escáner está sobre el efector terminal para la detección de características con relación a la localización en la que ha…
Dispositivo de embalaje y sistema de clasificación para el embalaje direccional de productos y método para el mismo.
(18/12/2019) Dispositivo de embalaje para el embalaje direccional de productos (P), como verduras y frutas, que comprende:
- un sistema de sensor que comprende: un sistema de cámara y/o uno o más sensores, y una unidad de procesamiento para procesar información sobre el producto obtenido por el sistema de cámara
y/o uno o más sensores diferentes;
- al menos una unidad de dirección conectada operativamente al sistema sensor en el que la unidad de dirección está provista de al menos un grado de libertad para la rotación del producto (P) alrededor de un eje de rotación sustancialmente horizontal; y
- un manipulador que comprende:
- un elemento de recogida configurado para recoger el producto…
Dispositivo para el bloqueo de un elemento de barra usando un bloque de bloqueo.
(18/12/2019) Dispositivo para bloquear un elemento de barra, el dispositivo comprende: una sección del cuerpo que tiene un orificio vertical en este y una unidad de bloqueo tipo anillo y un pistón en serie dispuesto en el orificio, donde el elemento de barra está dispuesto en el orificio para moverse 5 axialmente (X-Y) a través de la unidad de bloqueo y el pistón,
donde la unidad de bloqueo comprende:
un anillo externo con una superficie inclinada en un lateral del mismo, que define así un espacio tipo cuña (S1) alrededor de este;
un anillo interno dispuesto coaxialmente en un lado del anillo externo y que aloja un elemento de presurización que interactúa…
Aparato y procedimiento para separar y desplazar de forma repetida la bolsa de más arriba de una pila de bolsas.
(04/12/2019) Aparato para separar y desplazar repetidamente una bolsa de más arriba de una pila de bolsas que incluye una segunda bolsa de más arriba situada inmediatamente debajo de la bolsa de más arriba en la pila , extendiéndose cada una de la bolsa de más arriba y de la segunda bolsa de más arriba a lo largo de un eje de desplazamiento "X" definido entre un primer extremo y un segundo extremo opuesto de la pila y teniendo una sección de separación próxima al primer extremo de la pila , comprendiendo el aparato :
una mesa de apilado que tiene una superficie de apilado para soportar la pila de bolsas ;
un manipulador de separación…
Ventosa con faldón separable.
(04/12/2019) Ventosa con faldón separable que comprende:
un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular provista en un extremo inferior del mismo para extenderse hacia adentro, y una primera parte inclinada que se extiende desde la protuberancia de tal manera que aumenta hacia el extremo inferior;
un faldón que comprende un elemento en forma de falda que tiene un espacio interno (S) que se comunica con el conducto , e incluye una segunda parte inclinada que está provista en una parte superior de este para colocarse enfrente y entrar en contacto con la primera parte inclinada , y una parte de sellado que se sitúa en una parte inferior de este y se extiende desde la segunda parte inclinada para entrar en contacto con una superficie de un artículo; y
…
Aparato y método para ensamblar piezas de trabajo.
(04/09/2019) Un sistema de ensamble que comprende un aparato de ensamble y un dispositivo de posicionamiento , tal como un robot industrial, que tiene una porción extrema que comprende un conector , comprendiendo el aparato de ensamble :
un conjunto de estructura de soporte , tal como una estructura de bastidor, que está provisto de una porción de acoplamiento para acoplar el conjunto de estructura de soporte al dispositivo de posicionamiento , tal como un robot industrial, y
una pluralidad de miembros de fijación capaces de fijar una pieza de trabajo ,
en el que cada miembro de fijación está conectado con el conjunto de estructura de soporte a través de un…
(01/05/2019) Un dispositivo para recolectar setas de una cama de cultivo de setas, que comprende:
un brazo robótico configurado para desplegar de manera intercambiable uno de una pluralidad de diferentes elementos de agarre por succión , comprendiendo cada uno de los elementos de agarre por succión una copa de succión que tiene un perfil de tamaño y forma apropiado para agarrar un sombrero de una seta , teniendo el sombrero un perfil de tamaño y forma dentro de un intervalo predeterminado, estando configurado el brazo robótico para colocar el elemento de agarre por succión sobre una seta que va a recolectarse,
una fuente de vacío en comunicación de fluido con el elemento de agarre por succión para suministrar presión de aire negativa al elemento de agarre por succión para retener un sombrero de…
Conjunto de dispositivos de agarre y procedimiento para agarrar un componente de neumático.
(01/05/2019) Conjunto de dispositivos de agarre para agarrar un componente de neumático, en particular un componente de neumático para formar una capa maciza o una capa de amortiguación, en el que el conjunto de dispositivos de agarre está provisto de dispositivo de agarre que comprende un elemento de agarre con una cara de agarre que está dispuesta para enganchar y retener el componente del neumático por medio de succión, en el que la cara de agarre comprende una pluralidad de secciones , en el que el dispositivo de agarre para cada sección comprende un canal de vacío que desemboca en la sección respectiva de la cara de agarre para retener el componente de neumático en la sección respectiva y una válvula que se coloca entre…
Dispositivo de agarre por succión múltiple.
(30/01/2019) Dispositivo de agarre por succión múltiple con una placa de dispositivo de agarre y al menos dos dispositivos de agarre por succión , comprendiendo los dispositivos de agarre por succión en cada caso una carcasa y pudiendo moverse por medio de un cilindro neumático uno respecto a otro y respecto a la placa de dispositivo de agarre , estando prevista en la placa de dispositivo de agarre para cada dispositivo de agarre por succión (5a, 5b, 5c) al menos una barra de guiado , a través de la cual se guía el respectivo dispositivo de agarre por succión (5a, 5b, 5c), presentando cada dispositivo de agarre por succión , en un lado de succión (A) previsto para la recepción de un producto , múltiples…
Ensamblaje de cápsula de vacío.
(28/11/2018). Solicitante/s: KOREA PNEUMATIC SYSTEM CO., LTD. Inventor/es: CHO,HO-YOUNG.
Ensamblaje de cápsula de vacío que comprende:
un cuerpo en forma de tubo que tiene en este un primer pasaje de escape que se extiende en una dirección vertical;
una cápsula de vacío con un elemento de fijación en forma de anillo coaxialmente acoplado a un extremo inferior del cuerpo y con un saliente externo en una superficie lateral del mismo y una ventosa de succión flexible que tiene en un extremo superior del mismo, una brida interna instalada en la brida externa , donde el espacio interno (S) de la ventosa de succión está en conexión con el primer pasaje de escape ; y
un soporte siendo móvil en una dirección vertical y con un elemento anular dispuesto de tal manera que para entrar en contacto con una superficie superior de la brida interna de la ventosa de succión y un elemento elástico soportado contra el cuerpo a un extremo para elásticamente forzar el elemento anular a comprimirse y fijar la ventosa de succión.
PDF original: ES-2691719_T3.pdf
Dispositivo de elevación de tubo de vacío y manguera de elevación y método para el control de un dispositivo de elevación de tubo de vacío.
(14/11/2018) Dispositivo de elevación de tubo de vacío que comprende una manguera de elevación, manguera de elevación que tiene un primer extremo (15a) para la unión de la manguera de elevación y un segundo extremo (15b) para su conexión a medios dispuestos para acoplar la manguera de elevación a una carga , una fuente de vacío ajustable conectada a la manguera de elevación, al menos una primera válvula conectada a la manguera de elevación, y una unidad de control, dispuesta para ajustar la presión en el interior de la manguera de elevación por medio de señales de entrada con el fin de lograr un movimiento de desplazamiento de extensión o contracción de la manguera de elevación para el desplazamiento de una carga , caracterizado porque el dispositivo comprende una disposición (26; 31a; 31b; 34; 36; 38; 39) dispuesta…
Dispositivo de vacío de auto-liberación.
(21/03/2018) Un dispositivo de vacío de liberación automática para un sistema de manipulación de materiales, comprendiendo el dispositivo de vacío de liberación automática:
un cuerpo de una pieza adaptado para su conexión a un suministro aire a presión, incluyendo el cuerpo de una pieza, un paso de vacío y un elemento de ventilación;
un dispositivo de generación de vacío, alojado en el cuerpo de una pieza;
un elemento de émbolo, dispuesto en el cuerpo de una pieza y que es móvil entre una posición de precintado cerrando el paso de vacío y una posición de ventilación; y
cuando el elemento de émbolo está en la posición de precintado y cuando el suministro de aire a presión se activa para proporcionar…
Dispositivo de vacío de liberación automática.
(06/09/2017) Dispositivo de vacío de liberación automática para un sistema de manipulación de materiales, comprendiendo dicho dispositivo de vacío de liberación automática:
un cuerpo de dispositivo de vacío unitario adaptado para su conexión a un suministro de aire a presión, teniendo dicho cuerpo de dispositivo de vacío un paso de vacío y una boquilla Venturi , siendo activable dicho suministro de aire a presión para suministrar aire a presión en dicha boquilla Venturi para generar al menos un vacío parcial en dicho paso de vacío a través de un flujo de aire a presión a través de dicha boquilla Venturi;
un elemento de precintado móvil en dicho paso del cuerpo de dispositivo de vacío unitario y móvil entre una posición de precintado, en la que dicho elemento de precintado móvil permite un vacío, y una posición…
Dispositivo de prensión de al menos un producto deformable.
(16/08/2017) Dispositivo de prensión de al menos un producto alimenticio deformable , de manera ventajosa un alimento relleno que comprende una envoltura exterior que rodea un relleno interior , comprendiendo el dispositivo de prensión :
- una cámara ,
- un sistema de despresurización de la cámara , y
- una conexión fluídica que conecta el sistema de despresurización a la cámara ,
caracterizado porque el dispositivo de prensión comprende además:
- al menos una placa perforada que define una superficie de recepción del producto alimenticio deformable , presentando la placa perforada al menos una perforación que desemboca en la superficie de recepción y en la cámara…
Conjunto de módulos generadores de vacío por efecto Venturi y módulo de este conjunto.
(26/07/2017) Conjunto de al menos dos módulos generadores de vacío, incluyendo cada módulo un cuerpo en el que están alojados:
- unos medios neumáticos de generación del vacío y sus canales de conexión a un orificio de admisión de un gas a presión, a un orificio de escape de gas y a un orificio de aspiración , desembocando cada orificio al exterior a través de las partes (1b, 1c) de la superficie del cuerpo y
- unos medios electrónicos de guiado y control del funcionamiento de los medios neumáticos y sus conexiones eléctricas con una fuente de alimentación eléctrica y unos órganos externos de mando según un programa definido, que incluye dos conectores, uno de entrada y el otro de salida, también implantados en la superficie del cuerpo ,
caracterizado por que:
- el primer…
Procedimiento e instalación de prensión automática de un objeto.
(01/03/2017) Procedimiento de prensión automática, por un sistema poli articulado sometido a un sistema de visión , de un objeto situado en una zona capaz de recibir por lo menos un objeto , dicho sistema poli articulado comprendiendo por lo menos dos órganos de prensión de tipos diferentes, cada uno capaz de coger un objeto mediante por lo menos una zona de toma específica de dicho objeto caracterizado por que comprende por lo menos las etapas que consisten en:
- capturar una imagen de la zona de recepción por medio del sistema de visión ;
- tratar la información resultante de la imagen e identificar todas las zonas específicas…
HERRAMIENTA, SISTEMA Y PROCEDIMIENTO AUTOMATIZADO DE TOMA DE MUESTRAS.
(09/02/2017). Solicitante/s: VERA CAMPOS, Claudio. Inventor/es: VERA CAMPOS,Claudio, BERBAKOW CASALI,Ottavio, ANINAT DE LA MAZA,Rodrigo, JANS VASQUEZ,Carlos Fernando.
Un herramienta o aparato de muestreo automatizada para concentrados de mineral que comprende al menos un plato maestro de cambio automático; al menos un plato esclavo de cambio automático; al menos una placa de montaje conjunto tubular de muestreo; un conjunto tubular, soldado o adosado mecánicamente al plato esclavo; al menos un cabezal de muestreo desmontable, con freno para émbolo; y al menos un émbolo reforzado con ajuste deslizante más un dispositivo de amortiguación ubicado en el interior del cuerpo tubular. La invención comprende además el sistema y el procedimiento asociado.
Pesos de equilibrado con incrustación ferromagnética.
(11/01/2017). Solicitante/s: WEGMANN automotive GmbH & Co. KG. Inventor/es: VOGLER,MARKUS.
Peso de equilibrado que tiene un cuerpo de material no ferromagnético y una incrustación ferromagnética para sujetar el peso de equilibrado mediante fuerza magnética, el cuerpo está proporcionando una parte principal de la masa del peso de equilibrado y la incrustación ferromagnética está proporcionando una parte menor de la masa del peso de equilibrado, caracterizado porque, la incrustación ferromagnética es una varilla de forma cilíndrica.
PDF original: ES-2621756_T3.pdf
Dispositivo y procedimiento para fabricar componentes reforzados con fibras.
(16/11/2016). Solicitante/s: Broetje-Automation GmbH. Inventor/es: REINHOLD,RAPHAEL, JÜRGENS,STEFAN.
Dispositivo para uso en la fabricación de componentes reforzados con fibras, que comprende un bastidor de base posicionable , estando previsto en el bastidor de base un equipo de retención controlable para apresar y retener al menos una capa de fibras de refuerzo , estando previsto en el bastidor de base un equipo de drapeado con el cual se puede drapear la capa de fibras de refuerzo contra un macho de moldeo mediante la aplicación de un vacío y comprendiendo el equipo de drapeado una capa de drapeado extensible , caracterizado por que la capa de drapeado puede ser trasladada entre una posición de reposo y una posición de trabajo dispuesta en el lado inferior del bastidor de base.
PDF original: ES-2662925_T3.pdf
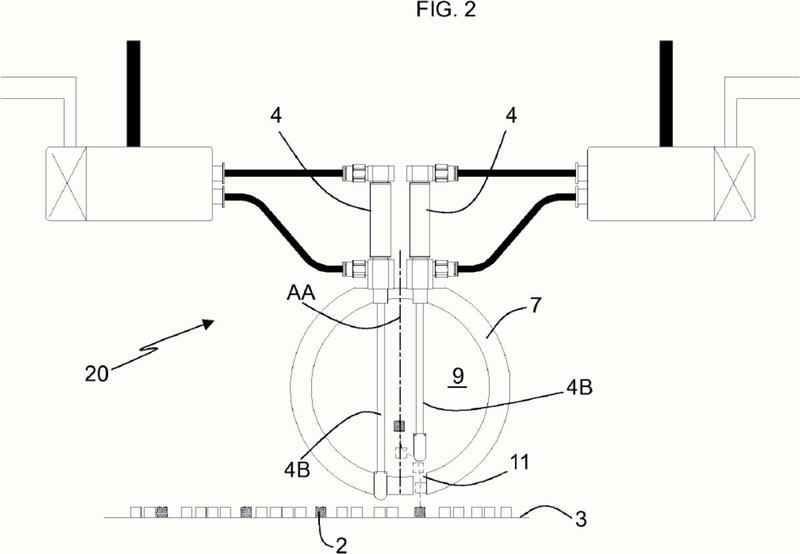
Método y sistema para expeler productos alimenticios en aparatos de control y selección.
(26/10/2016). Ver ilustración. Solicitante/s: Raytec Vision S.p.A. Inventor/es: PEZZOLI,RAFFAELE.
Sistema de vacío para expeler productos alimenticios , moviéndose dichos productos alimenticios sobre por lo menos un medio transportador y siendo ejecutado dicho sistema de recolección por medio de succión por vacío de por lo menos un conducto de succión , el cual intercepta transversalmente el medio transportador y lleva una pluralidad de orificios dirigidos hacia el medio transportador , y cilindros para controlar la apertura o cierre de los orificios , caracterizado por que el cilindro actúa como válvula obturadora, dado que los vástagos (4B) de los cilindros están adaptados para interferir directamente, es decir, cerrar o abrir, el correspondiente orificio de pasaje sobre el conducto de succión.
PDF original: ES-2611490_T3.pdf
(10/08/2016) Un aparato de mecanización que incorpora un robot articulado que incorpora un instrumento de captura para capturar una pieza de trabajo dispuesta en un extremo (100A) del brazo del mismo y que está adaptado para sacar la pieza de trabajo de los moldes y una unidad de mecanización equipada en una porción fija situada dentro de una zona alcanzable del brazo del robot articulado, en el que la unidad de mecanización incorpora una herramienta de trabajo que presenta una porción (21A, 21B, 223A, 223B, 125A, 125B) de perfilado en la que una porción (40T) blanco de mecanización de la pieza de trabajo capturada por el instrumento de captura del robot articulado está adaptada para ser presionada de acuerdo con el control de actitud del robot articulado, y un mecanismo flotante que está…
DISPOSITIVO CON ESLINGA PARA MANIPULAR TAPAS URBANAS DE ACERO MAGNETIZABLES.
(23/02/2016). Solicitante/s: ALCACER MARTINEZ, Ricardo. Inventor/es: ALCACER MARTINEZ,Ricardo.
1. Dispositivo articulado para manipular objetos pesados de acero magnetizable, especialmente tapas urbanas. Contiene unas asas, un pomo, unos amortiguadores de goma tipo Silentblock, unos imanes de neomidio en recipiente, unas eslingas con mosquetones y manijas caracterizado porque presenta:
- varias asas atornilladas entre sí en uno de sus extremos mediante un pomo .
- varios amortiguadores de goma tipo Silentblock atornillados a unas palancas giratorias y a unos imanes de neomidio en recipiente .
- varias eslingas , con mosquetones y con manijas.
PDF original: ES-1151259_U.pdf
Balanceo de pesos con inserto ferromagnético.
(17/02/2016). Ver ilustración. Solicitante/s: WEGMANN automotive GmbH & Co. KG. Inventor/es: VOGLER,MARKUS.
Peso de equilibrado que tiene un cuerpo de material no ferromagnético y un inserto ferromagnético para sujetar el peso de equilibrado mediante fuerza magnética, caracterizado porque el inserto ferromagnético proporciona al menos una superficie de contacto en al menos un lado del cuerpo del peso de equilibrado y el inserto ferromagnético es una varilla con forma cilíndrica.
PDF original: ES-2629382_T3.pdf
Dispositivo de puesta en referencia de la placa móvil con respecto a la placa fija de una mano de agarre de un robot.
(27/01/2016) Mano de agarre de robot que comprende una placa móvil con respecto a una placa fija y que comprende un dispositivo de puesta en referencia de la placa móvil con respecto a la placa fija , comprendiendo este dispositivo dos pestillos móviles en traslación en una dirección Z perpendicular a las dos placas entre una primera posición desbloqueada en la cual una de las placas es libre con respecto a la otra placa y una segunda posición bloqueada en la cual una parte (22a, 23a) de cada pestillo está introducida sensiblemente sin holgura en un vaciado de una placa y bloquea el desplazamiento de esta placa,…
DISPOSITIVO PARA SUJECIÓN Y MANIPULACIÓN DE ARTÍCULOS FERROMAGNÉTICOS.
(21/09/2015) 1. Dispositivo para sujeción y manipulación de artículos ferromagnéticos, caracterizado porque comprende una carcasa tubular , abierta por ambas bases, un capuchón de cierre de una de las bases de la carcasa; una barra cilíndrica que se aloja en la carcasa tubular y es de mayor longitud que la carcasa, sobresaliendo por un lado de la misma en una porción en la que va fijado el capuchón , mientras que en el extremo opuesto lleva fijado un imán , siendo dicha barra desplazable de manera axial dentro de la carcasa tubular entre posiciones de extracción y retracción del imán ; cuyos capuchón y carcasa tubular están relacionadas por un elemento de tracción…
Efector terminal giratorio, comprimible y expandible, para un robot industrial.
(12/08/2015) Un efector terminal para un brazo de un robot industrial que comprende:
(a) una pluralidad de tubos de succión acoplados en comunicación fluida con un múltiple de vacío;
(b) medios para variar el espaciamiento entre la pluralidad de tubos de succión; caracterizado por que este comprende además
(c) medios para rotar el múltiple de vacío y los medios para variar el espaciamiento entre la pluralidad de tubos de succión con relación al brazo del robot industrial, los medios para rotar comprenden un accionador rotatorio neumáticamente operado que tiene una plataforma rotatoria unida a un miembro de cuerpo, el múltiple…
DISPOSITIVO PARA SUJECIÓN Y MANIPULACIÓN DE ARTÍCULOS FERROMAGNÉTICOS.
(18/12/2014) Dispositivo para sujeción y manipulación de artículos ferromagnéticos, que comprende una carcasa tubular abierta por ambas bases, un capuchón de cierre y una barra cilíndrica que se aloja con facultad de desplazamiento axial en la carcasa tubular y va fijada por un lado al capuchón mientras que por el extremo opuesto es portadora de un imán . La carcasa tubular y el capuchón van relacionados por un elemento de tracción elástica y por un conjunto de accionamiento.
Dispositivo de manipulación y procedimiento para elevar una pieza de trabajo en forma de placa.
(18/06/2014) Dispositivo de manipulación para elevar una pieza de trabajo en forma de placa, que se compone al menos por segmentos de madera, materiales derivados de la madera o plástico, que comprende:
al menos un elemento de succión , que está configurado para succionar y elevar la pieza de trabajo , al menos una fuente de presión negativa , que proporcionando una potencia de presión negativa genera una presión negativa en el elemento de succión para succionar la pieza de trabajo , y
al menos un manómetro para medir la presión negativa en el elemento de succión , y
un dinamómetro , que está dispuesto y configurado para medir una fuerza de elevación aplicada mediante el elemento de succión a la pieza de trabajo…
SISTEMA DE MANIPULACIÓN DE TEJIDOS POROSOS.
(30/05/2014). Ver ilustración. Solicitante/s: INDUSTRIAS DEL TAVIGO, S.L. Inventor/es: COMENDEIRO LINDIN,Jorge.
El sistema comprende un soporte con un marco , donde se sitúa la capa de tejido poroso que se pretende manipular para situarla sobre otra capa de tejido poroso (3') previamente situada en una estructura de soporte general y formar, mediante varias capas, una pieza de tejido. También incluye un elemento de trasporte relacionado con un generador de flujo de aire para conseguir tanto el trasvase de la capa de tejido poroso desde el soporte con el marco hacia ese elemento de trasporte , así como manipular y soltar esa capa de tejido para situarla sobre la capa de tejido poroso (3') situada sobre la estructura de soporte general , estando el generador capacitado de variar el sentido de giro del flujo de aire para producir una depresión o una presión dinámica durante el manipulado de la correspondiente capa de tejido poroso.
{kind=link}
{kind=link}
{kind=link}