CIP-2021 : B25J 9/12 : eléctricos.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/12[2] › eléctricos.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/12 · · eléctricos.
CIP2021: Invenciones publicadas en esta sección.
Aparatos y procedimientos para el accionamiento remoto de puntos de control.
(24/06/2020) Aparato para el accionamiento remoto de un punto de control , que comprende:
un elemento alargado que tiene un primer extremo y un segundo extremo,
un elemento de apoyo que tiene una parte móvil , la parte móvil está acoplada de manera ajustable con el elemento alargado a lo largo de cualquier parte de la longitud del elemento alargado de manera que el primer extremo y el segundo extremo del elemento alargado están libres del contacto con el aparato para el accionamiento remoto de un punto de control durante una función de accionamiento;
un mecanismo de impulso en comunicación con la parte móvil , el mecanismo de impulso está configurado para proporcionar par a la parte móvil y al elemento alargado en respuesta a una fuerza motriz, en el que el mecanismo de impulso está desplazado de la parte móvil …
Método de control de una máquina con actuación redundante paralela, dispositivo de control asociado y máquina.
(01/02/2017) Un método para controlar una máquina que comprende:
- un marco ,
- un elemento móvil accionado en relación con dicho marco a lo largo de un cierto número de grados de libertad por una pluralidad de transmisiones mecánicas , cuyo número es estrictamente mayor que el número de grados de libertad de dicho elemento móvil, estando dichas transmisiones mecánicas paralelas entre sí y accionadas cada una por al menos un accionador que comprende:
* un cuerpo fijado a dicho marco,
* un miembro para accionar una transmisión mecánica ,
* un sensor de posición diseñado para producir una señal, llamada señal de posición medida, que…
SISTEMA DE INSPECCIÓN AUTÓNOMO, MÓVIL E INTELIGENTE DE REDES ELÉCTRICAS DE ALTA TENSIÓN Y CONDUCTOS DE LARGA DISTANCIA.
(04/03/2016) 1. Sistema de inspección de redes eléctricas de alta tensión y conductos de larga distancia, caracterizado por:
- Ser un robot inteligente, capaz de interpretar lo que está viendo y obtener conclusiones de forma inmediata gracias a la utilización de cámaras, dos de ellas en la parte superior y una en la parte lateral de la invención (Figura 1d).
- Autónomo, dado que no requiere mantenimiento alguno para carga de baterías ni operarios que lo manejen, utilizando la energía necesaria para su funcionamiento de la propia línea de alta velocidad.
2. Sistema de inspección de redes eléctricas de alta tensión y conductos de larga distancia…
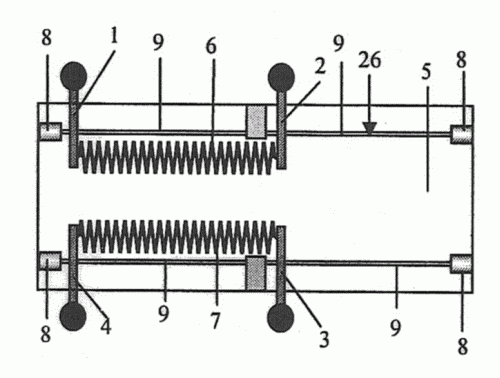
ROBOT CUADRUPEDO PARA PROCESOS TECNOLOGICOS.
(01/03/2007). Ver ilustración. Solicitante/s: CONSEJO SUP. INVESTIG. CIENTIFICAS. Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, FERNANDEZ SAAVEDRA,ROEMI EMILIA.
Robot cuadrúpedo para procesos tecnológicos que contiene dos elementos elásticos y , con uno de los extremos del primer elemento elástico conectado a la pata , y el otro extremo conectado a la pata , y con un extremo del segundo elemento elástico conectado a la pata y el otro extremo conectado a la pata . Tanto la rigidez como la longitud de los elementos elásticos y es la misma, y la longitud se elige de tal manera que cada uno de los elementos elásticos y esté en estado de equilibrio sin deformación cuando una de las patas a la que está conectado el correspondiente elemento elástico está en una posición extrema y la otra pata está en la posición media de la distancia entre sus posiciones extremas.
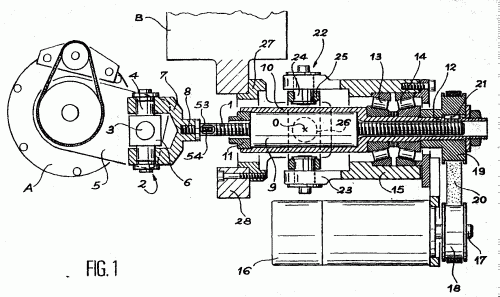
ELEMENTO DE UNION DE UN GATO DE TUERCA Y TORNILLO Y SU APLICACION EN UN BRAZO DE ROBOT.
(01/07/2004). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE COMPAGNIE GENERALE DES MATIERES NUCLEAIRES. Inventor/es: JOUAN DE KERVENOAEL, TANGUY.
Elemento de unión entre una primera pieza (A) y una segunda pieza (B), que comprende un gato de tuerca y de tornillo acoplado a través de la tuerca , un cuerpo de gato en el que se sostiene la tuerca mediante unos cojinetes con libertad de girar, un motor capacitado para producir rotaciones entre el tornillo y la tuerca y unos primeros y segundos medios de empalme entre la primera pieza y el tornillo y entre la segunda pieza y la tuerca, caracterizado porque los primeros y segundos medios de empalme consisten en dos cardanes, admitiendo los cardanes cada uno dos ejes de rotación perpendiculares al tornillo y a la tuerca, y los ejes de rotación de uno de los cardanes convergen hacia el centro de la tuerca.
ROBOT ACOPLADO MAGNETICAMENTE DE DOS EJES.
(16/10/1996). Solicitante/s: APPLIED MATERIALS, INC.. Inventor/es: LOWRANCE, ROBERT B.
UN ROBOT QUE TIENE UN PAR DE ACOPLAMIENTOS MAGNETICOS QUE ACOPLA CADA UNO UN MOTOR EN UNA PRIMERA CAMARA CILINDRICA A UN ANILLO CILINDRICO ASOCIADO SEPARADO CERCA DE LA PARED CILINDRICA DE DICHA PRIMERA CAMARA . EL ROBOT INCLUYE UN MECANISMO PARA CONVERTIR LA ROTACION DE CADA UNO DE ESTOS ANILLOS EN MOVIMIENTOS SEPARADOS DEL ROBOT. EN LA VERSION PREFERIDA, ESTOS MOVIMIENTOS SEPARADOS SON RADIALES Y ROTACIONALES. TAL CONSTRUCCION PERMITE REDUCIR LA CANTIDAD DE PRODUCCION DE PARTICULAS POR TAL ROBOT.
(16/06/1995) ACTUADORES DE MATERIAL RIGIDO DE ACTUACION ELECTRICA DAN ARTICULACION A CORTADORES DE RAMAS ROBOTICOS. ACTUADORES PIEZOELECTRICOS POR EJ., PUEDEN SER USADOS EN VARIAS REALIZACIONES DE UNIONES ROBOTICAS PARA GIRAR UNA CONEXION ESFERICA O CILINDRICA O PARA TRANSLADAR UNA VARILLA. UNOS PARES OPUESTOS DE ACTUADORES ENGANCHAN EN UN MOVIMIENTO LENTO Y MANTIENEN SIEMPRE UN AGARRE TIPO PRENSA EN EL CORTADOR DE RAMAS ROBOTICO . LAS SUPERFICIES DE TRACCION DE LOS ACTUADORES CONECTAN CON EL ROBOT CON UNA CLARIDAD CERO. AL REVES DEL USO DE LOS COGINETES CONVENCIONALES LA CLARIDAD CERO Y EL CONTACTO DE TODA LA ZONA DOTA DE UNA RIGIDEZ MECANICA MUY…
MECANISMO DE LIBERACION UMBILICAL.
(16/05/1995) UN MOTOR LINEAL QUE SE PUEDE MOVER A LO LARGO DE UN ESTATOR SUSTANCIALMENTE PLANO (P). HAY ACOPLADAS UNAS FUENTES ACCIONADORAS ELECTRICAS, MECANICAS Y NEUMATICAS AL MOTOR LINEAL A TRAVES DE UN CORDON UMBILICAL (C). UN MIEMBRO DE PROTECCION CONTRA LOS TIRONES , NORMALMENTE ENLAZADO AL MOTOR LINEAL, ES ARRASTRADO POR EL MOTOR LINEAL A LA POSICION DESEADA A LO LARGO DE LA PLACA. EL MIEMBRO DE PROTECCION CONTRA LOS TIRONES SE DESACOPLA ENTONCES DEL MOTOR LINEAL Y ES MAGNETICAMENTE ATRAIDO (O POR VACIO) Y TEMPORALMENTE "FIJADO" A LA PLACA. UNA PORCION DEL CORDON UMBILICAL QUEDA SUJETA AL MIEMBRO DE PROTECCION CONTRA LOS TIRONES EN UN PUNTO INTERMEDIO…
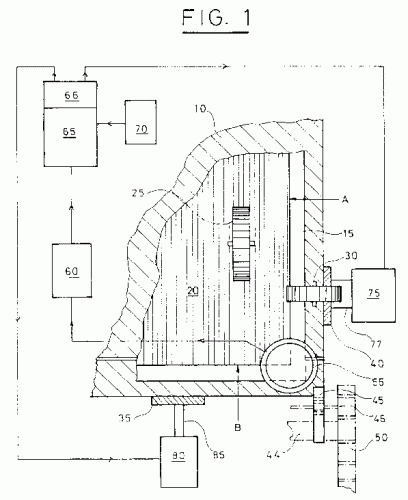
DISPOSITIVO PARA EL POSICIONADO DE ELEMENTO EN PLACA DURANTE LA TRANSFERENCIA EN UNA MAQUINA MANIPULADORA.
(16/06/1990). Ver ilustración. Solicitante/s: BOBST S.A.. Inventor/es: POLIC, GEORGES.
DISPOSITIVO PARA EL POSICIONADO DE ELEMENTO EN PLACA DURANTE LA TRANSFERENCIA EN UNA MAQUINA MANIPULADORA QUE COMPRENDE UNA CAMARA DISPUESTA POR ENCIMA DE UNA MESA DE MARGEN CON EL FIN DE PODER LEER SIMULTANEAMENTE LOS BORDES ANTERIOR Y LATERAL DE UN ELEMENTO EN PLACA Y LA PARTE IMPRESA DEL MISMO. LAS INFORMACIONES RECIBIDAS POR LA CAMARA SE TRANSMITEN A UN ACONDICIONADOR DE SEÑALES Y A CONTINUACION A UNA UNIDAD DE CALCULO QUE POSEE UNA INTERFASE EN LA QUE SE GENERAN EN FUNCION DE LOS PARAMETROS REGISTRADOS EN UNA MEMORIA , CONSIGNAS DE ACCIONAMIENTO PARA LOS MOTORES (75 RESPECTIVAMENTE 80) QUE ACCIONAN EL TOPE LATERAL Y EL TOPE FRONTAL.
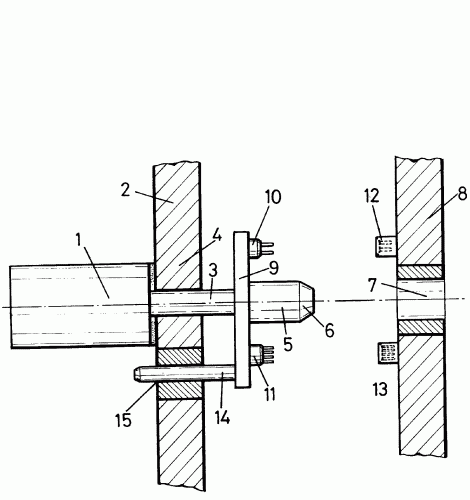
DISPOSITIVO CENTRADOR-CONECTOR PARA CARROS ROBOTIZADOS.
(01/03/1989). Ver ilustración. Solicitante/s: ARRASATE, S.COOP. LTDA.. Inventor/es: REMIREZ SALINAS, FELIX.
1. DISPOSITIVO CENTRADOR-CONECTOR PARA CARROS ROBOTIZADOS, ESENCIALMENTE CARACTERIZADO POR ESTAR CONSTITUIDO A PARTIR DE UN CILINDRO,PREFERENTEMENTE HIDRAULICO, DEBIDAMENTE SOLIDARIZADO AL CARRO ROBOTIZADO, EN CUALQUIER ZONA APROPIADA DEL MISMO, CUYO VASTAGO ATRAVIESA DICHO CARRO EMERGIENDO AL EXTERIOR DEL MISMO Y SE REMATA EN UNA CABEZA EXPANDIDA DOTADA DE UN FRENTE TRONCOCONICO Y CONVERGENTE, HABIENDOSE PREVISTO QUE EN LA PARED FRONTAL DE LA PRENSA Y EN POSICION DE ENFRENTAMIENTO A DICHA CABEZA, SE SITUE UN ORIFICIO, DIAMETRALMENTE COINCIDENTE CON ESTA ULTIMA Y COAXIAL CON ELLA EN SITUACION RELATIVA CORRECTA ENTRE CARRO Y PRENSA, TODO ELLO DE FORMA QUE LAS LIGERAS FALTAS DE PRECISION EN LA PARADA DEL CARRO CON RESPECTO A LA PRENSA SE AUTOCORRIGEN AL SER ACCIONADO EL CITADO CILINDRO E INCIDIR EL FRENTE TRONCOCONICO DE LA CABEZA DE SU VASTAGO SOBRE LA EMBOCADURA DEL ORIFICIO DE LA PRENSA.
APARATO ACTUADOR ELECTRICO ROBOTIZADO.
(16/10/1986). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
DISPOSITIVO ACTUADOR ELECTRICO ROBOTIZADO. CONSTA DE UN CARTER FIJO Y OTRO GIRATORIO, ACCIONADO POR UN MOTOR ELECTRICO QUE SE ALOJA DENTRO DE LOS MISMOS. UN TRANSFORMADOR DE COORDENADAS SE ALOJA EN UNA CAVIDAD REALIZADA EN EL ACTUADOR Y LA PARTE GIRATORIA DEL MISMO SE SUJETA EN EL CARTER GIRATORIO. COMO ELEMENTO DE DISIPACION DEL CALOR SE MONTA UN VENTILADOR EN EL ELEMENTO GIRATORIO DEL ACTUADOR Y SE DISPONE DE UN CIRCUITO CERRADO PARA EL PASO DEL AIRE ENTRE EL VENTILADOR Y UNA PLACA CONDUCTORA DEL CALOR QUE FORMA PARTE DEL CARTER FIJO. RODAMIENTOS DE BOLAS SOPORTAN UN EJE GIRATORIO QUE SE EXTIENDE A PARTIR DEL CARTER MOVIL, Y SE INCORPORA UN FRENO ELECTROMAGNETICO DE CONSTRUCCION LIGERA. ENTRE LA PARTE FIJA Y MOVIL SE INCLUYE UN ACOPLAMIENTO TIPO FUELLE PARA EL AISLAMIENTO ELASTICO DESTINADO A EVITAR LA DEFORMACION DE LOS ELEMENTOS PRODUCIDA POR LOS ESFUERZOS ENTRE LAS PARTES FIJA Y MOVIL.
{kind=link}
{kind=link}
{kind=link}
{kind=link}