Aparato de tratamiento de suelos dotado de movilidad automática y rueda para tal aparato.
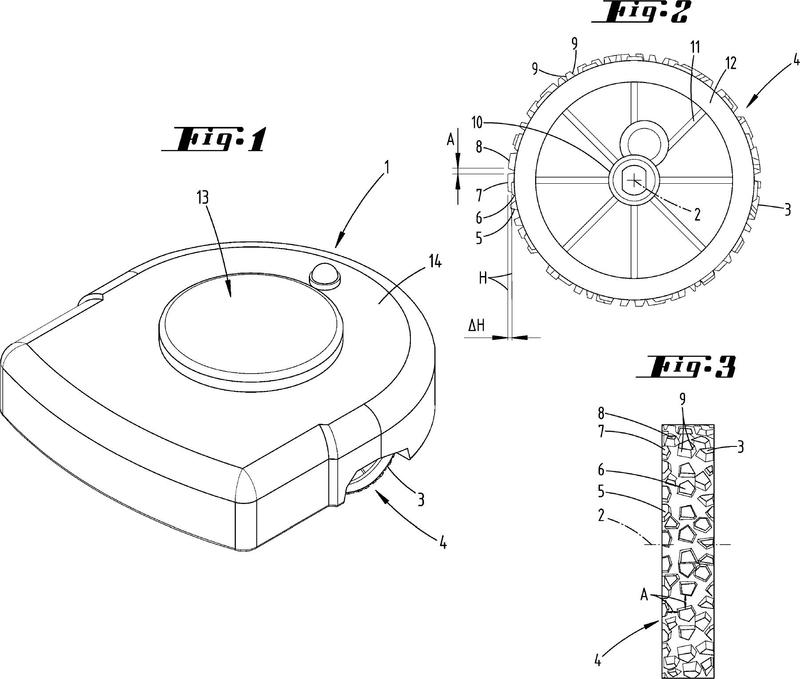
Rueda (4) para un aparato de tratamiento de suelos (1) dotado de movilidad automática,
siendo rotativa la rueda (4) alrededor de un eje de giro (2) y presentando una superficie circunferencial (3) que tiene una multiplicidad de bloques perfilados (5, 6, 7, 8) orientado radialmente hacia fuera, referido al eje de giro (2), y formados uno tras otro en dirección circunferencial, caracterizada por que los bloques perfilados (5, 6, 7, 8) forman un perfil de la superficie circunferencial (3) completamente heterogéneo en la dirección circunferencial, con lo que la estructura del perfil no se repite en dirección circunferencial.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E18186778.
Solicitante: VORWERK & CO. INTERHOLDING GMBH.
Nacionalidad solicitante: Alemania.
Dirección: MÜHLENWEG 17-37 42275 WUPPERTAL ALEMANIA.
Inventor/es: BLUM, MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47L9/00 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores.
PDF original: ES-2774957_T3.pdf
Fragmento de la descripción:
Aparato de tratamiento de suelos dotado de movilidad automática y rueda para tal aparato.
Campo de la técnica
La invención concierne a una rueda para un aparato de tratamiento de suelos dotado de movilidad automática, siendo rotativa la rueda alrededor de un eje de giro y presentando una superficie circunferencial que tiene una multiplicidad de bloques perfilados que miran radialmente hacia fuera, referido al eje de giro, y que están formados uno tras otro en dirección circunferencial.
La invención concierne también a un aparato de tratamiento de suelos dotado de movilidad automática con al menos una rueda de la clase antes citada.
Estado de la técnica
En el estado de la técnica se conocen aparatos de tratamiento de suelos dotados de movilidad automática, por ejemplo, como robots de limpieza autónomos que pueden realizar una tarea de aspiración y/o fregado. Los aparatos de tratamiento de suelos conocidos disponen en su mayoría de al menos dos ruedas motrices que ruedan con su superficie circunferencial sobre la superficie que se debe tratar.
Como es conocido por los vehículos automóviles, los aparatos de tratamiento de suelos se equipan también con ruedas perfiladas que permiten una mejor transmisión de fuerza a la superficie que se debe tratar. Esto se prefiere, por ejemplo, cuando el aparato de tratamiento de suelos debe pasar por encima de un obstáculo, tal como, por ejemplo, un canto de una alfombra o un umbral de una puerta.
Los documentos EP 2702915 A2, DE 102008009617 A1 y US 6633150 A1 divulgan, por ejemplo, robots móviles con ruedas perfiladas, presentando las ruedas unos bloques perfilados dispuestos regularmente uno tras otro en dirección circunferencial.
No obstante, aunque las ruedas perfiladas ya ofrecen ventajas frente a ruedas no perfiladas, es posible que el aparato de tratamiento de suelos tenga que abordar varias veces un obstáculo a superar para poder finalmente vencerlo.
Sumario de la invención
Partiendo del estado de la técnica antes citado, el problema de la invención consiste en crear un aparato de tratamiento de suelos dotado de movilidad automática o una rueda para este aparato de tratamiento de suelos, en los que se han encontrado una configuración favorable especialmente en lo que respecta a una superación de obstáculos.
Para resolver el problema se propone que los bloques perfilados de la rueda formen un perfil de la superficie circunferencial completamente heterogéneo en la dirección circunferencial de modo que no se repita la estructura del perfil en dirección circunferencial. En particular, puede estar previsto que la rueda presente bloques perfilados con formas diferentes entre ellas, alturas diferentes entre ellas, distancias diferentes ellas, orientaciones espaciales diferentes entre ellas, durezas diferentes entre ellas u otras características, como cantos inclinados del perfil o un perfil que se repite en segmentos contiguos.
Según la invención, la rueda del aparato de tratamiento de suelos presenta una superficie circunferencial, es decir, una superficie de rodadura, con un perfil de configuración irregular. Se consigue así que, al chocar la superficie circunferencial con un obstáculo, por ejemplo, un umbral de puerta, incluso al patinar eventualmente una rueda motriz, se ofrezcan muchos bloques perfilados de configuraciones diferentes de modo que exista en conjunto, frente a perfiles homogéneos, una elevada probabilidad de elegir un bloque perfilado que se pueda apoyar en el obstáculo y haga posible una transmisión de fuerza suficiente al obstáculo. Por tanto, se mejoran en conjunto las propiedades de traslación del aparato de tratamiento de suelos, especialmente la tracción sobre superficies diferentes, como, por ejemplo, alfombras o suelos duros diferentes, y también las propiedades de trepamiento. Además, gracias al perfil heterogéneo se minimiza la imagen de la huella del aparato de tratamiento de suelos al pasar por encima de superficies húmedas o ensuciadas, así como sobre suelos de moqueta. Gracias a que se evita un patinamiento de las ruedas o una detención del aparato de tratamiento de suelos, se pueden superar más rápidamente los obstáculos, lo que ahorra tiempo de tratamiento durante el empleo del aparato de tratamiento de suelos. Se puede conseguir así a su vez una zona de limpieza agrandada por carga completa de un acumulador eléctrico.
En particular, se propone que los bloques perfilados presenten formas diferentes entre ellos. Los bloques perfilados pueden derivarse de diferentes formas en corte transversal, por ejemplo, redondas, rectangulares, cuadradas, triangulares y similares. Asimismo, los bloques perfilados pueden presentar también superficies de forma libre que presenten cantos rectos y/o cantos curvos.
Asimismo, los bloques perfilados pueden estar conformados como poligonales, referido a un corte transversal situado en la dirección circunferencial. Cuanto mayor sea el número de lados de la superficie poligonal en sección transversal tanto mayor será la probabilidad de que uno de los lados se coloque de modo que la rueda pueda apoyarse en un obstáculo que se debe vencer.
Además, como alternativa o adicionalmente, puede estar previsto que los bloques perfilados presenten alturas diferentes entre ellos, referido a una dirección radial de la rueda. En particular, es recomendable que varios o todos los bloques perfilados presenten una diferencia de altura de más de 0, 5 mm con respecto a otros bloques perfilados. Por tanto, los lados frontales de los bloques perfilados que forman la superficie circunferencial de la rueda sobresalen de todo el perfil en grado diferente, con lo que algunos de los bloques perfilados se proyectan más allá de los otros. Es posible así que varios bloques perfilados puedan aplicarse al mismo tiempo a un canto del obstáculo de modo que resulte en conjunto a una mayor fuerza de adherencia. Por otra parte, eventualmente además de espacios intermedios entre los bloques perfilados, se producen zonas en las que puede encajar al menos parcialmente un obstáculo, con lo que puede optimizarse la transmisión de fuerza del aparato de tratamiento de suelos a la superficie. En la práctica, se ha manifestado como ventajosa una diferencia de altura de al menos 0, 5 mm, pudiendo ser ventajosas también diferencias de altura de 1, 0 mm, 1, 5 mm, 2 mm o más.
Se propone que los bloques perfilados presenten distancias diferentes entre ellos. Por tanto, los bloques perfilados contiguos presentan distancias diferentes, con lo que un primer bloque perfilado puede presentar con respecto a un segundo bloque perfilado una distancia distinta de la presentada con respecto a un tercer bloque perfilado. Los bloques perfilados pueden estar distanciados uno de otro, por ejemplo, en menos de 1 mm. Sin embargo, son posibles también distancias de varios milímetros. Por tanto, se pueden obtener también zonas parciales sobre la superficie circunferencial de la rueda que no presenten bloques perfilados, con lo que los bloques perfilados adyacentes pueden contactar con el obstáculo desde direcciones espaciales diferentes. Por consiguiente, se tiene que, por ejemplo, una superficie lateral de un bloque perfilado ataca al obstáculo. Así, aun cuando el bloque perfilado no contacte el obstáculo con un lado frontal, se impide, a pesar de ello, que la rueda resbale hacia fuera del obstáculo.
En particular, se propone que los bloques perfilados presenten orientaciones espaciales diferentes entre ellos, referido a la superficie circunferencial. Por tanto, según la orientación y la configuración de un obstáculo a superar, existe una alta probabilidad de que uno o varios bloques perfilados de la rueda proporcionen al obstáculo una superficie de contacto cargable y sea así posible una superación del obstáculo.
Asimismo, se propone que los bloques perfilados estén formados por materiales duros diferentes entre ellos. En particular, los bloques perfilados pueden consistir en un plástico elástico, especialmente un plástico flexible a manera de goma, tal como EPDM (caucho de etileno-propileno-dieno (monómero) ) . Debido a la elasticidad del material se deforma la superficie circunferencial de la rueda al apoyarse sobre la superficie o al aplicarse a un obstáculo, con lo que aumenta una resistencia de rozamiento entre la rueda y la superficie transitada o el obstáculo. Por tanto, la fuerza de accionamiento del aparato de tratamiento de suelos puede transmitirse de manera óptima a la superficie o al obstáculo que se debe superar. Eventualmente, la superficie circunferencial de la rueda puede adaptarse,...
Patentes similares o relacionadas:
Aspiradora y sistema y métodos de aspiración de uso en un ambiente de suelo elevado, del 3 de Junio de 2020, de Martins Maintenance, Inc: Una aspiradora para un sistema de suelo técnico que comprende una pluralidad de paneles elevados soportados por postes que se colocan en un […]
Robot que sigue la pared, del 26 de Febrero de 2020, de IROBOT CORPORATION: Un método para controlar un robot de limpieza que tiene un paño de limpieza , que comprende: ejecutar un comportamiento de seguimiento de pared manteniendo […]
Aparato de desplazamiento automático, en particular aparato colector de polvo del suelo de desplazamiento automático, del 25 de Diciembre de 2019, de VORWERK & CO. INTERHOLDING GMBH: Aparato de desplazamiento automático, en particular aparato colector de polvo del suelo de desplazamiento automático, con ruedas de desplazamiento de accionamiento […]
Aparato de limpieza dotado de movilidad automática, del 11 de Septiembre de 2019, de VORWERK & CO. INTERHOLDING GMBH: Aparato de limpieza dotado de movilidad automática que comprende un dispositivo de limpieza de superficies para limpiar una superficie a limpiar, […]
 Aspiradora, del 28 de Agosto de 2019, de DIVERSEY, INC: Una aspiradora que comprende:
un recipiente que delimita un volumen de recogida interno ;
una unidad de succión provista de un motor y un impulsor […]
Aspiradora, del 28 de Agosto de 2019, de DIVERSEY, INC: Una aspiradora que comprende:
un recipiente que delimita un volumen de recogida interno ;
una unidad de succión provista de un motor y un impulsor […]
 Colector de polvo que comprende una unidad de mango y destinado para una aspiradora, del 31 de Julio de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un colector de polvo para una aspiradora, comprendiendo el colector de polvo :
un conjunto de separación centrífuga configurado para separar […]
Colector de polvo que comprende una unidad de mango y destinado para una aspiradora, del 31 de Julio de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un colector de polvo para una aspiradora, comprendiendo el colector de polvo :
un conjunto de separación centrífuga configurado para separar […]
Procedimiento de control de un robot móvil, del 17 de Julio de 2019, de DYSON TECHNOLOGY LIMITED: Un procedimiento para controlar un robot móvil , comprendiendo el procedimiento: monitorizar un primer sistema del robot móvil para […]
ASPIRADOR DE POLVO CON CANALES DE CIRCULACIÓN DE AIRE DE ESCAPE, del 16 de Febrero de 2012, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Aspirador de polvo con una carcasa y un orificio de escale para una corriente de aire de salida, que está conectado según la técnica de […]