Máquina herramienta con un dispositivo para la supervisión de la colisión.
Máquina herramienta de control numérico para la mecanización de una pieza de trabajo con
- al menos un eje de avance (X,
111; Y, 112; Z, 121), y
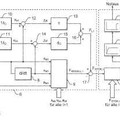
- un dispositivo (200) para la supervisión de la colisión en la máquina herramienta (100); en la que el dispositivo (200) para la supervisión de la colisión comprende:
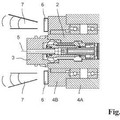
- un sensor de colisión (210) instalado en una parte de la máquina (130) de la máquina herramienta, que está configurado como sensor de aceleración,
- un medio de reconocimiento de la colisión (220; 290) para el reconocimiento de una colisión de partes de la máquina (130, 140, 152, 150) de la máquina herramienta (100), cuando un valor de medición detectado por el sensor de colisión (210) excede un valor límite de colisión máximo prefijado, y
- un medio de emisión de señales (230) para la emisión de una señal de detención para la detención del al menos un husillo de trabajo (140) y del al menos un eje de avance (X, 111; Y, 112; Z, 121) de la máquina herramienta, cuando el medio de reconocimiento de la colisión (220) reconoce una colisión, y una instalación (240; 170; 190) para la fijación del valor límite de colisión en la máquina herramienta (100), en la que la máquina herramienta comprende, además, una instalación de supervisión de la vibración (270) para la supervisión de una vibración en el al menos un husillo de trabajo (140) sobre la base del valor de medición detectado por el sensor de colisión (210) configurado como sensor de aceleración en función del tiempo, en la que la instalación de supervisión de la vibración (270) está instalada para realizar sobre la base del valor de medición detectado por el sensor de colisión (210) configurado como sensor de aceleración en función del tiempo una verificación de los cojinetes de los husillos durante el funcionamiento de los husillos de trabajo (140) sin herramienta alojada, en la que la instalación (240; 170; 190) para la fijación del valor límite de colisión en la máquina herramienta (100) comprende un medio de ajuste (240) para el ajuste de varios valores límites de la colisión ajustables a través de un operario de la máquina herramienta (100), en la que la instalación (240; 170; 190) para la fijación del valor límite de colisión está instalada, además, de tal manera que los valores límites de la colisión ajustables se pueden ajustar en una zona inferior al valor límite de la colisión máximo prefijado, de manera que el dispositivo (200) para la supervisión de la colisión está instalado para provocar una parada de la máquina herramienta, incluyendo la parada de todos los ejes axiales de los ejes de avance y de los husillos de trabajo de la máquina herramienta, cuando el valor de medición detectado por el sensor de colisión excede el valor límite máximo de colisión, y para provocar otra reacción cuando el valor de medición detectado por el sensor de colisión excede el valor límite de colisión ajustable, de manera que el medio de ajuste (240) está instalado de tal manera que se puede ajustar por el operario de la máquina herramienta qué reacción debe activarse en la máquina herramienta para el caso de que el valor de medición detectado por el sensor de colisión exceda un valor límite de colisión ajustable respectivo, de tal manera que para cada zona entre dos valores límites de colisión se pueden ajustar diferentes reacciones, de manera que las reacciones ajustables a través del operario comprenden una alarma al operario a través de una representación óptica y/o a través de una señal de alarma óptica, una detención del avance con detención de los accionamientos de los ejes de avance durante la continuación de la marcha de los accionamientos de los husillos de trabajo, una detención del avance con detección retardada de los accionamientos de los husillos de trabajo, un cambio automático de la herramienta y una parada rápida de los ejes y de los husillos de trabajo de la máquina herramienta empleando instalaciones de frenado adicionales, de manera que el dispositivo para la supervisión de la colisión comprende, además, unos medios de memoria (250) de datos de valores límites de colisión para el almacenamiento de datos de valores límites de colisión, que indican para una pluralidad de herramientas unos valores límites de colisión en función de la herramienta, de manera que la instalación (240; 170; 190) para la fijación del valor límite de colisión está instalada, además, para ajustar de manera automática en el caso de un cambio de herramienta en la máquina herramienta (100) los valores límites de la colisión ajustables sobre la base de de los valores límites de la colisión a ajustar indicados en los datos de los valores límites para la herramienta incorporada, y de manera que la instalación de supervisión de la vibración (270) está instalada, además, para realizar de manera automát8ica una verificación de los cojinetes después de la puesta en marcha de la máquina herramienta después de una parada del al menos un husillo de trabajo (140) y del al menos un eje de avance (X, 111; Y, 112; Z, 121) de la máquina herramienta (100) cuando el medio de reconocimiento de la colisión (220) ha reconocido una colisión.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11181729.
Solicitante: DECKEL MAHO PFRONTEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DECKEL-MAHO-STRASSE 1 87459 PFRONTEN ALEMANIA.
Inventor/es: KETTEMER,ROLF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B19/4061 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Prevención de las colisiones o de las zonas prohibidas.
PDF original: ES-2717630_T3.pdf
Patentes similares o relacionadas:
Método para mecanización con arranque de material de las superficies planas de una pieza a labrar, del 3 de Julio de 2019, de OPEN MIND Technologies AG: Método para mecanizar con arranque de material de las superficies de una pieza a labrar por medio de un útil , en especial una fresa, que se mueve respecto […]
Procedimiento para ajustar varias zonas parciales de una zona de protección deseada, del 15 de Marzo de 2017, de SICK AG: Procedimiento para ajustar varias zonas parciales de una zona de protección deseada , en el que a) se detectan las posiciones de una pluralidad de […]
 Aparato y método para la generación de un camino libre de colisiones de una máquina rectificadora, del 8 de Noviembre de 2013, de WALTER MASCHINENBAU GMBH: Dispositivo de control de la máquina para una máquina rectificadora con un cabezal de rectificado y conun soporte de pieza de trabajo , […]
Aparato y método para la generación de un camino libre de colisiones de una máquina rectificadora, del 8 de Noviembre de 2013, de WALTER MASCHINENBAU GMBH: Dispositivo de control de la máquina para una máquina rectificadora con un cabezal de rectificado y conun soporte de pieza de trabajo , […]
 Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia, del 17 de Junio de 2013, de KUKA Laboratories GmbH: Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar […]
Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia, del 17 de Junio de 2013, de KUKA Laboratories GmbH: Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar […]
 Procedimiento para la detección de colisión, del 30 de Abril de 2013, de DURR SYSTEMS GMBH: Procedimiento de monitorización para un sistema de accionamiento de un robot, en particular de un robot depintura, con un motor y una parte móvil accionada […]
Procedimiento para la detección de colisión, del 30 de Abril de 2013, de DURR SYSTEMS GMBH: Procedimiento de monitorización para un sistema de accionamiento de un robot, en particular de un robot depintura, con un motor y una parte móvil accionada […]
 Dispositivo y método para proteger un husillo de trabajo, del 1 de Marzo de 2013, de OTT-JAKOB SPANNTECHNIK GMBH: Dispositivo para proteger un husillo de trabajo que puede girar alojado en un cabezal (4A, 4B) de unamáquina mecanizadora y/o para proteger […]
Dispositivo y método para proteger un husillo de trabajo, del 1 de Marzo de 2013, de OTT-JAKOB SPANNTECHNIK GMBH: Dispositivo para proteger un husillo de trabajo que puede girar alojado en un cabezal (4A, 4B) de unamáquina mecanizadora y/o para proteger […]
Procedimiento de ajuste de una instalación domótica y herramienta para la aplicación de un tal procedimiento, del 23 de Marzo de 2012, de SOMFY SAS: Procedimiento de ajuste de un accionador y un elemento móvil de una instalación domótica , que comprende: - una etapa de utilización de una herramienta […]
DISPOSITIVO CONDUCTOR DE CONTROL NUMÉRICO CON DISPOSITIVO PARA DETECTAR ANOMALÍAS OPERATIVAS CON EL PROPÓSITO DE DETECTAR COLISIONES ACCIDENTALES Y MÉTODO PARA DETECTAR ANOMALÍAS OPERATIVAS PARA ESTE DISPOSITIVO, del 9 de Enero de 2012, de Agie Charmilles SA: Un dispositivo conductor controlado numéricamente que comprende un dispositivo para detectar anomalías operativas con la intención de detectar colisiones […]