DISPOSITIVO CONDUCTOR DE CONTROL NUMÉRICO CON DISPOSITIVO PARA DETECTAR ANOMALÍAS OPERATIVAS CON EL PROPÓSITO DE DETECTAR COLISIONES ACCIDENTALES Y MÉTODO PARA DETECTAR ANOMALÍAS OPERATIVAS PARA ESTE DISPOSITIVO.
Un dispositivo conductor controlado numéricamente que comprende un dispositivo para detectar anomalías operativas con la intención de detectar colisiones accidentales,
comprendiendo:
- al menos un motor (14) capaz de desplazar una carga (18) a lo largo de al menos un recorrido por medio de un conjunto de elementos de transmisión (T),
- unos primeros medios para medir la posición (15) dispuestos aguas arriba de al menos uno de los elementos de dicho conjunto para la transmisión del motor (14) y diseñados para proporcionar un primer valor de posición (xM),
- unos segundos medios para medir la posición (16) dispuestos aguas debajo de este elemento del conjunto para la transmisión de dicha carga (18) y diseñados para proporcionar un segundo valor de posición (xR) correspondiente a la posición de la carga en dicho recorrido,
- medios de cálculo (20) para establecer a intervalos predeterminados (h) señales de error (t) correspondientes a la diferencia entre el primer y el segundo valores de posición, y
- medios de análisis para analizar estas señales de error de manera que se detecten colisiones accidentales, en el que los medios de análisis comprenden medios de discriminación ajustados de manera que analicen dichas señales de error (d) obtenidas en dichos intervalos predeterminados como una función del camino (xR) recorrido en un marco de referencia espacial (d, xR) discriminando entre los errores debidos a colisione accidentales y a aquellos debidos a al menos otra causa.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05006084.
G05B19/4061FISICA. › G05CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Prevención de las colisiones o de las zonas prohibidas.
G05B19/4062G05B 19/00 […] › Monitorización del bucle de realimentación, p. ej. sobrecarga del servomotor, pérdida de realimentación o de referencia.
Clasificación PCT:
G05B19/4061G05B 19/00 […] › Prevención de las colisiones o de las zonas prohibidas.
G05B19/4062G05B 19/00 […] › Monitorización del bucle de realimentación, p. ej. sobrecarga del servomotor, pérdida de realimentación o de referencia.
Clasificación antigua:
G05B19/4061G05B 19/00 […] › Prevención de las colisiones o de las zonas prohibidas.
G05B19/4062G05B 19/00 […] › Monitorización del bucle de realimentación, p. ej. sobrecarga del servomotor, pérdida de realimentación o de referencia.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Dispositivo conductor de control numérico con dispositivo para detectar anomalías operativas con el propósito de detectar colisiones accidentales y método para detectar anomalías operativas para este dispositivo La invención presente trata de un dispositivo conductor de control numérico que comprende un dispositivo para detectar anomalías operativas con el propósito de detectar colisiones accidentales, que comprende: - al menos un motor capaz de conducir una carga a lo largo de al menos un recorrido por medio de un conjunto de elementos de transmisión, - unos primeros medios para medir la posición dispuestos aguas arriba de al menos uno de los elementos de dicho conjunto de transmisión al motor y cuyo propósito es proporcionar un primer valor de la posición, - unos segundos medios para medir la posición dispuestos aguas debajo de este elemento del conjunto de la transmisión a dicha carga y cuyo propósito es proporcionar un segundo valor de posición correspondiente a la posición de la carga en dicho recorrido, - medios de cálculo para establecer a intervalos predeterminados señales de error que corresponden a las diferencias entre el primer y el segundo valor de posición, y - medios de análisis para analizar estas señales de error de manera que se detecten colisiones accidentales. Dichos dispositivos ya han sido utilizados en el campo de las máquinas herramienta como se describe en los documentos DE 34 26 863 AL o DE-A-199 60 834. Se utilizan dispositivos conductores comparables en otras muchas aplicaciones, como por ejemplo robots, máquinas impresoras, equipos para producción textil, máquinas de moldeado por inyección, estampación y alisado, grúas, antenas de seguimiento de satélite, telescopios, etc. En el dispositivo conductor como el representado en la Figura 1, la posición del motor 14 se mide por medio de un transductor 15 de manera que se controle las comunicaciones de fase en las posiciones correctas del rotor del motor. El par del motor se transmite a la carga 18 que representa por ejemplo a la mesa de trabajo o también a un husillo provisto de una herramienta por medio de una transmisión de poleas 11 y 13 y de una correa 12 seguida de un tornillo con tuerca 17. La posición de la carga 18 se mide por medio de una regla lineal 16. El final de carrera se detecta mediante un topo mecánico 19 de manera que se proteja el mecanismo en caso de un defecto con el programa del servo conductor. Este tope 19 puede servir en una fase de preparación de la máquina como referencia absoluta para la inicialización del husillo. Tal inicialización es necesaria en el caso en el que las reglas lineales no proporcionan esta referencia. Generalmente, los contactores de final de carrera son utilizados en ese caso para la inicialización. Si estos contactores son eliminados por razones de reducción de costes o similares, entonces un dispositivo de detección de colisiones efectivo y fiable como el propuesto por las invenciones hace necesario al objeto de utilizar el tope 19 como una referencia, sin que haya riesgo de dañar los mecanismos del dispositivo debido a fuerzas de impacto excesivas. Cuando se utiliza una máquina herramienta, un robot u otros ítems de equipo con una articulación conducida por un servo motor, un elemento en movimiento puede colisionar con otro miembro de la máquina, con una pieza que va a ser mecanizada o con un componente del entorno. En este caso, el problema que se debe resolver consiste en prevenir y / o detectar la colisión. La medida preventiva que está más extendida dentro de esta técnica, es la limitación del recorrido del husillo en cuestión por medio de contactores de final de carrera que forman una limitación lógica cableada, a través de la definición previa de los límites del dominio alcanzable del conjunto de posiciones que constituyen una limitación de programa, o también con la ayuda de topes mecánicos que forman una limitación física. Dentro de este contexto de la prevención de colisiones, del documento de patente US 5,347,459 ha propuesto también que el espacio de trabajo sea modelado de manera que se identifiquen previamente las interferencias entre los cuerpos en movimiento relativo. La desventaja de este procedimiento de modelado es la necesidad de asegurar la cinemática de todos los objetos en el área de trabajo, no estando disponible esta información por ejemplo en relación con una máquina herramienta para la realización de cortes que puede resultar atascada entre la pieza y la herramienta. Al objeto de superar esta falta de conocimiento en relación a la posición de cuerpos dentro del espacio de trabajo, se ha recurrido por ejemplo a sistemas de visión, conduciendo en todos los casos a soluciones complejas y caras. La patente de los Estados Unidos US 4,820,895 propone un sensor de contacto eléctrico en el caso de una máquina de electro erosión. Tal dispositivo puede, de acuerdo con la patente DE 40 08 661 A, servir para la alineación de una herramienta tridimensional en una pieza semi - terminada, haciéndolo gracias a su capacidad para detectar las 2 E05006084 15-11-2011 colisiones de la herramienta y la pieza de manera precisa y sin gasto. Sin embargo, el uso de un sensor de contacto eléctrico requiere la presencia de objetos conductores de la electricidad. La patente US 5,119,006 ha propuesto que sean monitorizados un cierto número de criterios, como por ejemplo el valor absoluto de la corriente / par del motor del servo. Los procedimientos descritos en esta patente se restringen a mecanismos conductores con una transmisión muy rígida o muy precisa, lo que requiere soluciones mecánicas que son necesariamente caras en el caso de ciertas aplicaciones industriales para las que la introducción de un segundo sensor de posición lineal hacen posible implementar procedimientos de programa para compensar los errores relacionados en particular con la flexibilidad o con los defectos homocinéticos. Esta compensación puede dar lugar a demandas de soporte en el bucle de retorno de velocidad del motor, así como a errores de seguimiento de gran velocidad y así a grandes variaciones en la corriente del motor. Más aún, si la inercia del motor domina a la inercia de la carga, en referencia al lateral del motor, entonces el efecto de las fuerzas de una colisión en al corriente del motor no se pueden distinguir de las fuerzas que deben ser provistas para una aceleración normal, o respectivamente una deceleración. Así, las señales sin procesar, como se propone en la patente US 5,119,006 no contendrán más la información relevante que hace posible identificar una colisión con sensibilidad suficiente para evitar el gasto de material. Para una mejor utilización para la detección de una colisión de las señales de par del motor, las señales de velocidad y de corriente de motor respectivamente, la patente US 5,304,906 propone la construcción de un observador de anomalías de par basado en los parámetros del mecanismo conductor y en parámetros de filtrado cuyo propósito es reducir la influencia del ruido de medida a alta frecuencia. Sin embargo, el método propuesto en esta patente US 5,304,906 se limita a un modelo rígido para la transmisión del mecanismo conductor. E procedimiento es de esta manera insuficiente para mecanismos conductores para los que la flexibilidad de la transmisión y los defectos homocinéticos asumen un significado considerable. Sin embargo, el conocimiento de los parámetros tales como la inercia y el par constante del motor son compatibles con las numerosas aplicaciones como por ejemplo máquinas herramienta en donde la masa que va a ser conducida puede fácilmente variar en un factor de 5 durante el uso normal de la instalación. La Solicitud de Patente DE 199 60 834 A1 propone que una posición lineal sea medida en la parte conducida del husillo y que esta medida sea comparada con una medida indirecta tomada dentro de la cadena de transmisión, de manera que se forme una señal de error. Un incremento abrupto en dicha señal indica que una colisión o un incidente anormal han ocurrido. Sin embargo, nada sugiere en al misma otra cosa que comparar el incremento temporal en la señal de error como un límite fijado previamente. El problema de esta señal de error en relación con la posición entre el motor y la parte conducida es que está contaminada por errores homocinéticos, que son característicos de la operación normal y que conduce de nuevo al límite de disparo que ha sido fijado en un valor excesivo. Por otro lado, la solución propuesta no es adecuada cuando es necesario acelerar violentamente grandes inercias. Tal es el caso para los husillos de X e Y de máquinas de electro - erosión, que sirven para mover el conjunto de la pieza que va a ser mecanizada y la bandeja llena de líquido dieléctrico, llegando posiblemente las masas conducidas a alcanzar una tonelada. Un objeto... [Seguir leyendo]
Reivindicaciones:
1.- Un dispositivo conductor controlado numéricamente que comprende un dispositivo para detectar anomalías operativas con la intención de detectar colisiones accidentales, comprendiendo: - al menos un motor (14) capaz de desplazar una carga (18) a lo largo de al menos un recorrido por medio de un conjunto de elementos de transmisión (T), - unos primeros medios para medir la posición (15) dispuestos aguas arriba de al menos uno de los elementos de dicho conjunto para la transmisión del motor (14) y diseñados para proporcionar un primer valor de posición (xM), - unos segundos medios para medir la posición (16) dispuestos aguas debajo de este elemento del conjunto para la transmisión de dicha carga (18) y diseñados para proporcionar un segundo valor de posición (xR) correspondiente a la posición de la carga en dicho recorrido, - medios de cálculo (20) para establecer a intervalos predeterminados (h) señales de error (t) correspondientes a la diferencia entre el primer y el segundo valores de posición, y - medios de análisis para analizar estas señales de error de manera que se detecten colisiones accidentales, en el que los medios de análisis comprenden medios de discriminación ajustados de manera que analicen dichas señales de error (d) obtenidas en dichos intervalos predeterminados como una función del camino (xR) recorrido en un marco de referencia espacial (d, xR) discriminando entre los errores debidos a colisione accidentales y a aquellos debidos a al menos otra causa. 2.- El dispositivo como el reivindicado en la reivindicación 1, en el que dicho conjunto de transmisión (T) posee una flexibilidad de transmisión que se utiliza en virtud de dichas señales de error (d) como indicador de fuerza en relación con el movimiento de la carga (18). 3.- Un dispositivo como el reivindicado en las reivindicaciones 1 ó 2,en el que los medios de discriminación comprenden al menos una restricción del dominio relevante de los datos relacionados con las señales de error a lo largo de un movimiento limitado de la carga por el recorrido que forman al menos una ventana espacial (Lx, xS) representando un camino recorrido por la carga diseñado de manera que discrimine entre los errores debidos a una colisión accidental y aquellos debidos a al menos otra causa. 4.- El dispositivo como el reivindicado en cualquiera de las reivindicaciones 1 a 3, en el que los medios de discriminación consisten en medios espaciales de filtrado adaptados para desechar los errores homocinéticos y / o los errores debidos a variaciones térmicas. 5.- El dispositivo como el reivindicado en la reivindicación 4, en el que los medios de filtrado comprenden dos series circulares de datos (44, 45) relacionadas por una parte con los movimientos (xR) de la carga a lo largo de dicho recorrido y por otro lado a las señales de error (d) correspondientes a estos movimientos y al menos una ventana rectangular espacial (D) que comprende los datos más recientes relacionados con dichos movimientos (xR) y a dichas señales de error (d) extraídas de las dos series circulares. 6.- El dispositivo como el reivindicado en la reivindicación 5, en el que los medios de filtrado están diseñados de manera que: - registrar de acuerdo con un período de muestreo predeterminado (h) muestras de pares de variables relacionadas con los movimientos (xR) de la carga y con las señales de error (d) asociadas con estos movimientos en las dos series circulares que tienen un tamaño (m) de manera que formen pares de datos introducidos xR(k), d(k), denotando el índice 1 del coeficiente k la última muestra registrada; - extraer un subconjunto de las muestras sucesivas más recientes. 13 E05006084 15-11-2011 Para el cual el dominio de las posiciones recorridas por la carga (18) a lo largo de dicho camino es menor que o igual al primer límite fijo y predeterminado (Lx) correspondiente al ancho espacial de dicha ventana rectangular de manera que Este subconjunto de muestras sucesivas (D) formen una ventana rectangular espacial en la que se encuentran como abscisas los movimientos (xR) de la carga y como ordenadas las señales de error (d), siendo el valor del primer límite (Lx) predeterminado de manear que sea una fracción de un período del error o errores que deben ser desechados; - detectar una colisión que está definida por la superación de un segundo límite predeterminado (Ld,rel) del rango dinámico de la señal de error (d) a lo largo del subconjunto (D) elegido en la ventana rectangular de acuerdo con la operación donde max d(k), y min d(k) son los valores máximo y mínimo respectivamente de d en el subconjunto D. 7.- El dispositivo como el reivindicado en la reivindicación 6, en el que dicho segundo límite Ld,rel está fijado a m % del valor máximo de dmax determinado para situaciones de movimientos de la carga sin colisión, estando ventajosamente m entre 120 y 250, y muy favorablemente entre 140 y 200, y preferiblemente siendo igual a 150. 8.- El dispositivo como el reivindicado en la reivindicación 6 ó 7, en el que los medios de filtrado comprende medios de interpolación diseñados de manera que obtengan por interpolación de dichos primer límite (Lx) de la ventana rectangular espacial un valor de interpolación de la señal de error (d), estando este primer límite (Lx) y dicho valor de interpolación almacenados como las muestras más antiguas de la ventana rectangular espacial. 9.- El dispositivo como el reivindicado en la reivindicación 4, en el que los medios de filtrado comprenden al menos un filtro lineal invariante espacial que comprende una ventana espacial exponencial. 10.- El dispositivo como el reivindicado en la reivindicación 9, en el que la constante o constantes espaciales (kS) del filtro o filtros lineales invariantes espaciales está o están fijados de acuerdo con los defectos homocinéticos que uno decide tolerar. 11.- El dispositivo como el reivindicado en la reivindicación 10, en el que los medios de filtrado están diseñados para - registrar de acuerdo con un período de muestreo predeterminado una muestra de un par de variables xR(k), d(k) relacionados respectivamente con el movimiento de la carga y con la señal de error asociada, - calcular en cada período de muestreo una señal (k) de acuerdo con la ecuación donde (k-1) es la memoria de la entrada de las señal de error y donde 14 E05006084 15-11-2011 - calcular una señal de salida y (k) de acuerdo con la ecuación y(k) = - (k) + d (k) - detectar una colisión que está definida por la superación de un límite predeterminado Ld,rel,Isi de acuerdo con la operación |y (k)| > Ld,rel,Isi. 12.- Un método para detectar anomalías de operación diseñado para detectar colisiones adicionales en dispositivos conductores controlados numéricamente que comprende: - al menos un motor (14) capaz de mover una carga (18) a lo largo de al menos un recorrido por medio de un conjunto de elementos de transmisión (T), - unos primeros medios para medir la posición (15) dispuesto aguas arriba de al menos uno de lso elementos de dicho conjunto para transmisión al motor (14) y diseñado para proporcionar un primer valor de posición (xX), - segundos medios para medir la posición (16) dispuestos aguas debajo de este elemento del conjunto para la transmisión a dicha carga (18) y diseñado para proporcionar un segundo valor de posición (xR) correspondiente a la posición de la carga en dicho recorrido, - medios de cálculo (20) para establecer a intervalos predeterminados señales de error (d) correspondientes a la diferencia entre el primer y el segundo valor de posición, y - medios de análisis para analizar estas señales de error de manera que se detecten colisiones accidentales, en el que los medios de discriminación se emplean de manera que analicen dichas señales de error (d) obtenidas en dichos intervalos predeterminados como una función del camino (xR) recorrido en un marco de referencia espacial (d, xR) para discriminar entre los errores debidos a colisiones accidentales y aquellos debidos a al menos otra causa. 13.- El método como el reivindicado en la reivindicación 12, en el que se hace uso como indicador de fuerza en relación con el movimiento de la carga 18 de la flexibilidad de transmisión de dicho conjunto de transmisión (T) en virtud de dichas señales de error d. 14.- El método como el reivindicado en las reivindicaciones 12 ó 13, en el que las señales de error d se analizan por medio de la discriminación realizando al menos una restricción del dominio relevante de los datos relativos a las señales de error durante un movimiento limitado de la carga a lo largo del recorrido que forman al menos una ventana espacial (Lx, xS) realizando un camino recorrido por la carga diseñado de tal manera que se discrimine entre los errores debidos a una colisión accidental y aquellos debidos a al menos otra causa. 15.- El método como el reivindicado en cualquiera de las reivindicaciones 12 a 14, en el que se hace uso de medios de discriminación que comprende medios espaciales para filtrar adaptados para descartar los errores homocinéticos y / o los errores debidos a variaciones térmicas. 16.- El método como el reivindicado en la reivindicación 15, en el que se realiza un filtrado por los medios de filtrado que comprenden dos series circulares de datos (44, 45) relacionados por un lado con los movimientos (xR) de la carga a lo largo de dicho camino y por otro lado con las señales de error (d) correspondientes a estos movimientos y al menos una ventana espacial rectangular (D) que comprende los datos más recientes relacionados condichos movimientos (xR) y condichas señales de error (d) extraídos de dichas series circulares. 17.- El método como el reivindicado en la reivindicación 16, que consiste en: - registrar de acuerdo con período de muestreo predeterminado (h) ejemplos de pares de variables relacionadas con los movimientos (xR) de la carga y de las señales de error (d) asociadas con estos movimientos en las dos series E05006084 15-11-2011 circulares que tienen un tamaño n de manera que formen pares de datos adquiridos (xR(k), d (k)), denotando el índice 1 del coeficiente k la última muestra registrada; - extraer un subconjunto de las muestras sucesivas más recientes para el cual el dominio de las posiciones recorridas por la carga (18) a lo largo de dicho camino menor o igual que un primer límite fijo y predeterminado (Lx) correspondiente a al anchura espacial de dicha ventana rectangular de manera que Este subconjunto de muestras sucesivas (D) formen una ventana rectangular espacial en la que se encuentran como abscisas los movimientos (xR) de la carga y como ordenadas las señales de error (d), siendo el valor de dicho primer límite (Lx) predeterminado de manera que sea una fracción de un período del error o de los errores que van a ser descartados; - detectar una colisión que está definida por la superación de un segundo límite predeterminado (Ld,rel) del rango dinámico de la señal de error (d) a lo largo de un subconjunto (D) elegido en la ventana rectangular de acuerdo con la operación en la que maxRED d (k), y minRED d (k) respectivamente son el valor máximo y mínimo respectivamente de d en el subconjunto D. 18.- El método como el reivindicado en la reivindicación 17, en el que dicho segundo límite Ld,rel está fijado a m % del valor máximo de dmax determinado para situaciones de movimientos de la carga sin colisión, estando ventajosamente m entre 120 y 250, muy favorablemente entre 140 y 200, y preferiblemente siendo igual a 150. 19.- El método como el reivindicado en las reivindicaciones 17 ó 18, en el que los medios de interpolación se emplean de manera que se calcule para dicho primer límite (Lx) de la ventana espacial rectangular un valor de interpolación de la señal de error (d), siendo dicho primer límite (Lx) y dicho valor de interpolación almacenados como las muestras más antiguas y que están más alejadas en la ventana espacial rectangular. 20.- El método como el reivindicado en la reivindicación 15, en el que se realiza un filtrado por medio de un filtro que comprende al menos un filtro lineal invariante espacial que comprende una ventana espacial exponencial. 21.- El método como el reivindicado en la reivindicación 20, en el que la constante o constantes de espacio (xS) del filtro o filtros lineales invariantes espaciales está o están fijados de acuerdo con los defectos homocinéticos que uno decido tolerar. 22.- El método como el reivindicado en al reivindicación 21, en el que se combinan dos o más filtros pasa alto, pasa - bajo, filtra banda o pasa banda, para cada uno de los cuales se elige un valor diferente de la constante espacial de manera que se extraiga precisamente los componentes homocinéticos tolerables de la señal de error (d). 23.- El método como el reivindicado en la reivindicación 21, que consiste en: 16 E05006084 15-11-2011 - registrar de acuerdo con período de muestreo predeterminado una muestra de un par de variables (xR (k), d (k)) relacionadas respectivamente con el movimiento de la carga y con la señal de error asociada, - calcular para cada período de muestreo una señal (k) de acuerdo con la ecuación en la que el (k-1) es la memoria de la entrada de la señal de error y donde - calcular la señal de salida y (k) de acuerdo con la ecuación y (k) = - (k) + d(k) y - detectar una colisión que está definida por sobrepasar un límite predeterminado Ld,rel,Isi de acuerdo con la operación |y (k)| > Ld,rel,Isi. 17 E05006084 15-11-2011 18 E05006084 15-11-2011 19 E05006084 15-11-2011 E05006084 15-11-2011 21 E05006084 15-11-2011 51 58 Detección de una colisión considerando una ventana rectangular Gestionar la entrada de d considerando un cierto movimiento L R definiendo D Colisión si a lo largo de este movimiento L R dmax L d, rel Fig. 5 Fin 22 x R (k), d(k) Determinar el punto de inserci ón del nuevo punto en la serie circular Borrar el punto mas antiguo si hay superposición Introducir el nuevo punto en la serie circular Actualizar la longitud del recorrido durante la entrada almacenada Actualizar el comienzo de la entrada; gestionar la longitud máxima de la entrada Determinar d max(la variación en d dentro de la entrada relevante) ?dmax E05006084 15-11-2011 52 53 54 56 57 23 E05006084 15-11-2011 24 E05006084 15-11-2011 E05006084 15-11-2011
Patentes similares o relacionadas:
Robot con articulaciones de rigidez variable y procedimiento de cálculo de dicha rigidez optimizada, del 22 de Noviembre de 2017, de Softbank Robotics Europe: Robot dotado de capacidades de desplazamiento en al menos una cadena articulada que comprende, al menos, un sensor de contacto del extremo de […]
Procedimiento para la detección de colisión, del 30 de Abril de 2013, de DURR SYSTEMS GMBH: Procedimiento de monitorización para un sistema de accionamiento de un robot, en particular de un robot depintura, con un motor y una parte móvil accionada […]
PROCEDIMIENTO Y SISTEMA PARA LA DETERMINACION DEL MOVIMIENTO DE UN MOTOR EN UN SISTEMA ELEVALUNAS ELECTRICO DE VEHICULO., del 16 de Noviembre de 2006, de MERITOR LIGHT VEHICLE SYSTEMS, INC.: Procedimiento para la detección de un cambio de posición de un motor de accionamiento eléctrico en un sistema elevalunas eléctrico de vehículo , […]
PROCEDIMIENTO PARA LA COLOCACION DE UNA SUPERFICIE DE CIERRE QUE ES ACCIONADA POR UNA FUERZA EXTERNA., del 1 de Septiembre de 2005, de ROBERT BOSCH GMBH: Procedimiento para el alcance sin contacto de una posición de tope superior A fija, provista con una junta de obturación de un elevalunas eléctrico accionado […]
PROCEDIMIENTO PARA LA SUPERVISION DEL PROCESO DE CIERRE Y APERTURA EN UN SISTEMA CON AL MENOS UNA PIEZA ACCIONADA POR MOTOR ELECTRICO., del 1 de Julio de 1999, de TEMIC TELEFUNKEN MICROELECTRONIC GMBH: SE DESCRIBE UN PROCEDIMIENTO PARA LA SUPERVISION DEL PROCESO DE APERTURA Y CIERRE EN UN SISTEMA CON AL MENOS UNA PARTE MOVIL MEDIANTE MOTOR ELECTRICO. PARA ELLO SE HAN PREVISTO […]
METODO DE DETECCION DE ANOMALIAS DE UN CONVERTIDOR R/D, del 1 de Noviembre de 2007, de TAMAGAWA SEIKI KABUSHIKI KAISHA: Un método de detección de una anomalía para un convertidor R/D en un aparato transformador de coordenadas, que comprende proporcionar un transformador […]
Método para mecanización con arranque de material de las superficies planas de una pieza a labrar, del 3 de Julio de 2019, de OPEN MIND Technologies AG: Método para mecanizar con arranque de material de las superficies de una pieza a labrar por medio de un útil , en especial una fresa, que se mueve respecto […]
Máquina herramienta con un dispositivo para la supervisión de la colisión, del 13 de Marzo de 2019, de DECKEL MAHO PFRONTEN GMBH: Máquina herramienta de control numérico para la mecanización de una pieza de trabajo con
- al menos un eje de avance (X, 111; Y, 112; Z, […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Procedimiento para la detección de colisión, del 30 de Abril de 2013, de DURR SYSTEMS GMBH: Procedimiento de monitorización para un sistema de accionamiento de un robot, en particular de un robot depintura, con un motor y una parte móvil accionada […]
Procedimiento para la detección de colisión, del 30 de Abril de 2013, de DURR SYSTEMS GMBH: Procedimiento de monitorización para un sistema de accionamiento de un robot, en particular de un robot depintura, con un motor y una parte móvil accionada […]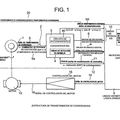 METODO DE DETECCION DE ANOMALIAS DE UN CONVERTIDOR R/D, del 1 de Noviembre de 2007, de TAMAGAWA SEIKI KABUSHIKI KAISHA: Un método de detección de una anomalía para un convertidor R/D en un aparato transformador de coordenadas, que comprende proporcionar un transformador […]
METODO DE DETECCION DE ANOMALIAS DE UN CONVERTIDOR R/D, del 1 de Noviembre de 2007, de TAMAGAWA SEIKI KABUSHIKI KAISHA: Un método de detección de una anomalía para un convertidor R/D en un aparato transformador de coordenadas, que comprende proporcionar un transformador […]