Procedimiento para medir la posición de una superficie de un vehículo.
Procedimiento para medir la posición (P) de una superficie (4-8) de un vehículo (2) sobre una calzada (3),
con los pasos:
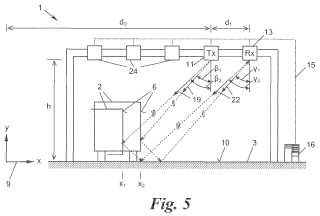
a) emisión de un primer rayo de radar (12) desde una posición de emisión (S) por encima del plano (10) de la calzada (3) en una primera dirección de emisión principal (19) inclinada oblicuamente hacia abajo, recepción de un primer rayo de radar (14) reflejado en una posición de recepción (Ei) por encima del plano (10) de la calzada (3) en una primera dirección de recepción principal (22) inclinada oblicuamente hacia abajo y transformación del primer rayo de radar (14) reflejado en una primera señal de recepción (Ri), estando distanciadas entre ellas la posición de emisión (S) y la posición de recepción (Ei) y estando situadas en un plano común (18) la primera dirección de emisión principal (19) y la primera dirección de recepción principal (22);
b) emisión de un segundo rayo de radar (12) desde la posición de emisión (S) en una segunda dirección de emisión principal (19) diferente a la primera e inclinada oblicuamente hacia abajo, recepción de un segundo rayo de radar (14) reflejado en la posición de recepción (Ei) en una segunda dirección de recepción principal (22) diferente a la primera e inclinada oblicuamente hacia abajo y transformación del segundo rayo de radar (14) reflejado en una segunda señal de recepción (Ri), estando situadas en el plano (18) mencionado la segunda dirección de emisión principal (19) y la segunda dirección de recepción principal (22);
c) selección de la señal de recepción (Ri) con la mayor intensidad de señal (RSSIi); y
d) determinación de la posición (P) mencionada a partir de las posiciones de emisión y de recepción (S, Ei) y las direcciones de emisión principales y de recepción principales (19, 22) de la señal de recepción (Ri) con la mayor intensidad de señal (RSSIi);
realizándose los pasos a) y b) o bien sucesivamente o bien simultáneamente.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13167405.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: NAGY, OLIVER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
- G07B15/06 G […] › G07 DISPOSITIVOS DE CONTROL. › G07B APARATOS DE ENTREGA DE TIQUES; TAXIMETROS; DISPOSICIONES O APARATOS PARA COBRAR EN UN PUNTO DE CONTROL EL PRECIO DE LOS BILLETES O LOS DERECHOS DE ENTRADA O DE PEAJE; APARATOS PARA FRANQUEAR. › G07B 15/00 Dispositivos o aparatos para cobrar el precio de los billetes, el peaje o las entradas en uno o más puntos de control (monedas o papeles de valor, p. ej. billetes G07D; aparatos para la venta o el alquiler de artículos o de servicios accionados por monedas, tarjetas de crédito, billetes o similares G07F 7/00, G07F 17/00). › Disposiciones para tarificación vial o peaje urbano de vehículos o usuarios de vehículos, p. ej. sistema automático de peaje.
- G08G1/015 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › con disposiciones para distinguir dos o más tipos de vehículos, p. ej. distinción entre automóviles y ciclos.
PDF original: ES-2541427_T3.pdf
Fragmento de la descripción:
Procedimiento para medir la posición de una superficie de un vehículo La presente invención se refiere a procedimientos para medir la posición de una superficie de un vehículo sobre una calzada.
La medición de posición de vehículos es importante para muchas tareas en el control, la vigilancia y la tarifación de tráfico, por ejemplo para la determinación del carril usado por un vehículo en un control electrónico de tráfico o un puesto de peaje o para la detección de la posición longitudinal de un vehículo a lo largo de la calzada para poder asignar el vehículo de forma unívoca a la imagen de una cámara de vigilancia de tráfico. La medición de la posición de una superficie del vehículo, por ejemplo de sus superficies de recubrimiento y laterales es de importancia para la determinación de tamaño y por tanto para la clasificación del vehículo, por ejemplo si se trata de un turismo o de un camión, para poder controlar e imponer por ejemplo limitaciones de circulación o tasas de peaje dependientes de la clase de vehículo.
Para la medición de posición se están empleando en la actualidad preponderantemente sistemas ópticos tales como escáneres láser o videocámaras. Estos dependen de buenas condiciones de visibilidad y por tanto dependen fuertemente de las condiciones meteorológicas; fallan frecuentemente en caso de lluvia, nieve o neblina. Además, la óptica de escáneres láser y videocámaras requiere una frecuente limpieza para mantenerse lista para el uso y al presentar piezas movidas mecánicamente tienen una vida útil limitada y un rango de temperatura de funcionamiento limitado.
En áreas parciales como las instalaciones de monitoreo de flujo de tráfico se usan en la actualidad también sistemas de radar que desde un punto elevado, por ejemplo un mástil de antena junto a una autovía, detectan mediante un radar Doppler vehículos movidos permitiendo el seguimiento de los movimientos de estos en una imagen de radar. La precisión de medición de posición de este tipo de sistemas de radar es limitada y la evaluación de Doppler de las velocidades de vehículos requiere un elevado grado de cálculo para crear la imagen de flujo de tráfico.
La invención tiene el objetivo de proporcionar procedimientos novedosos para la medición de posición de superficies de vehículos, que sean menos propensos a fallar que los sistemas ópticos conocidos y que sean más sencillos, más económicos y más precisos que los sistemas de radar conocidos.
Este objetivo se consigue con un procedimiento del tipo mencionado al principio, con los pasos:
a) emisión de un primer rayo de radar desde una posición de emisión por encima del plano de la calzada en una primera dirección de emisión principal inclinada oblicuamente hacia abajo, recepción de un primer rayo de radar reflejado en una posición de recepción por encima del plano de la calzada en una primera dirección de recepción principal inclinada oblicuamente hacia abajo y transformación del primer rayo de radar reflejado en una primera señal de recepción, estando distanciadas entre ellas la posición de emisión y la posición de recepción y estando situadas en un plano común la primera dirección de emisión principal y la primera dirección de recepción principal; b) emisión de un segundo rayo de radar desde la posición de emisión en una segunda dirección de emisión principal inclinada oblicuamente hacia abajo, recepción de un segundo rayo de radar reflejado en la posición de recepción en una segunda dirección de recepción principal inclinada oblicuamente hacia abajo y transformación del segundo rayo de radar reflejado en una segunda señal de recepción, estando situadas en el plano mencionado la segunda dirección de emisión principal y la segunda dirección de recepción principal; c) selección de la señal de recepción con la mayor intensidad de señal; y d) determinación de la posición mencionada a partir de las posiciones de emisión y de recepción y las direcciones de emisión principales y de recepción principales de la señal de recepción con la mayor intensidad de señal;
realizándose los pasos a) y b) o bien sucesivamente o bien simultáneamente.
La invención está basada en el uso de un rayo de radar de dirección controlable y una evaluación de las señales de recepción del rayo de radar en diferentes posiciones angulares, indicando la señal de recepción más fuerte las direcciones de emisión y de recepción en las que se produce la reflexión en la superficie buscada; con cálculos geométricos sencillos sobre la base de las posiciones de emisión y de recepción conocidos y de las direcciones de emisión y de recepción (ángulos) con respecto a la calzada, determinados de esta manera, como plano de referencia y eventualmente como plano de reflexión secundario se pueden determinar por tanto puntos de medición individuales en el plano de medición formado por las direcciones de emisión y de recepción. Para ello, no se requieren mediciones de Doppler, de interferencia ni de tiempo de propagación; basta con evaluaciones sencillas de las intensidades de señal de las señales de recepción, lo que simplifica en fuerte medida la evaluación por cálculos del procedimiento de medición. Por lo tanto, incluso con una multiplicidad de emisores y receptores de radar que se disponen por ejemplo en la misma calzada para obtener varios puntos de medición distribuidos por la calzada, el procedimiento se puede realizar con un hardware económico.
En formas de realización sencillas de la invención, los rayos de radar pueden ser rayos de radar CW (Continuous Wave -onda continua) o rayos de radar FMCW (Frequency Modulated Continuous Wave -onda continua de frecuencia modulada) y el dispositivo de evaluación evalúa por ejemplo sólo las intensidades de señal de las señales de recepción. En rayos de radar CW o FMCW, el dispositivo de evaluación puede realizar por ejemplo mediciones de interferencia o FMCW para la medición de distancias.
En una forma de realización alternativa de la invención, los rayos de radar contienen impulsos de emisión y las señales de recepción contienen por consiguiente impulsos de recepción, considerándose para la selección mencionada sólo aquellas señales de recepción, cuyos impulsos de emisión se sitúen respectivamente dentro de un intervalo de tiempo determinado después de un impulso de emisión. Los intervalos de tiempo ("range gates") se pueden ajustar de tal forma que se oculten las reflexiones múltiples de los rayos de radar, por ejemplo en objetos del entorno que no interesan o entre la placa de fondo del vehículo y la calzada, a fin de aumentar la precisión de medición y la susceptibilidad a parásitos.
El dispositivo de medición se puede usar, según la posición angular de las direcciones de emisión y de recepción principales mencionadas, para medir diferentes superficies de un vehículo. Según una primera forma de realización, cada dirección de emisión principal y cada dirección de recepción principal correspondiente son paralelas unas respecto a otras para medir la posición de una superficie sustancialmente vertical; según una forma de realización alternativa, cada dirección de recepción principal y cada dirección de recepción principal están inclinadas en simetría especular respecto a la vertical, para medirla posición de una superficie sustancialmente horizontal. La primera forma de realización mide superficies verticales, por ejemplo las paredes laterales o frontales del vehículo, a través de una reflexión secundaria en la calzada sustancialmente horizontal ("efecto córner") . La segunda forma de realización mide directamente la reflexión primaria en una superficie horizontal, por ejemplo la superficie de recubrimiento o el capó del vehículo.
Preferentemente, para el procedimiento se usan no sólo dos, sino muchas direcciones de emisión principales y de recepción principales diferentes para obtener más de dos señales de recepción, entre los que se selecciona la señal de recepción con la mayor intensidad de señal. De esta manera, se puede obtener una multiplicidad de puntos de medición en el plano común mencionado.
Otra forma de realización del procedimiento de la invención consiste en que se usa al menos una posición de recepción adicional para obtener señales de recepción adicionales, seleccionándose entre todas las señales de recepción y señales de recepción adicionales la señal de recepción con la mayor intensidad de señal. De esta manera se pueden obtener todavía más puntos de medición, por ejemplo también de forma distribuida por el ancho de la calzada, para aumentar el intervalo de medición (la "apertura") del procedimiento de medición. Para ello, preferentemente,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para medir la posición (P) de una superficie (4-8) de un vehículo (2) sobre una calzada (3) , con los pasos:
a) emisión de un primer rayo de radar (12) desde una posición de emisión (S) por encima del plano (10) de la calzada (3) en una primera dirección de emisión principal (19) inclinada oblicuamente hacia abajo, recepción de un primer rayo de radar (14) reflejado en una posición de recepción (Ei) por encima del plano (10) de la calzada (3) en una primera dirección de recepción principal (22) inclinada oblicuamente hacia abajo y transformación del primer rayo de radar (14) reflejado en una primera señal de recepción (Ri) , estando distanciadas entre ellas la posición de emisión (S) y la posición de recepción (Ei) y estando situadas en un plano común (18) la primera dirección de emisión principal (19) y la primera dirección de recepción principal (22) ; b) emisión de un segundo rayo de radar (12) desde la posición de emisión (S) en una segunda dirección de emisión principal (19) diferente a la primera e inclinada oblicuamente hacia abajo, recepción de un segundo rayo de radar (14) reflejado en la posición de recepción (Ei) en una segunda dirección de recepción principal (22) diferente a la primera e inclinada oblicuamente hacia abajo y transformación del segundo rayo de radar (14) reflejado en una segunda señal de recepción (Ri) , estando situadas en el plano (18) mencionado la segunda dirección de emisión principal (19) y la segunda dirección de recepción principal (22) ; c) selección de la señal de recepción (Ri) con la mayor intensidad de señal (RSSIi) ; y d) determinación de la posición (P) mencionada a partir de las posiciones de emisión y de recepción (S, Ei) y las direcciones de emisión principales y de recepción principales (19, 22) de la señal de recepción (Ri) con la mayor intensidad de señal (RSSIi) ;
realizándose los pasos a) y b) o bien sucesivamente o bien simultáneamente.
2. Procedimiento según la reivindicación 1, caracterizado por que los rayos de radar (12, 14) son rayos de radar CW o FMCW.
3. Procedimiento según la reivindicación 1, caracterizado por que los rayos de radar (12, 14) contienen impulsos de emisión (T) y las señales de recepción (Ri) contienen por consiguiente impulsos de recepción (Ii) , considerándose para la selección mencionada sólo aquellas señales de recepción (Ri) , cuyos impulsos de recepción (Ii) se encuentren respectivamente dentro de un intervalo de tiempo (25) predeterminado después de un impulso de emisión (T) .
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por que cada dirección de emisión principal (19) y cada dirección de recepción principal (22) correspondiente son paralelas unas respecto a otras para determinar la posición de una superficie (5-8) sustancialmente vertical.
5. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por que cada dirección de emisión principal (19) y cada dirección de recepción principal (22) correspondiente están inclinadas en simetría especular respecto a la vertical (20) para determinar la posición (P) de una superficie (4) sustancialmente horizontal..
6. Procedimiento según una de las reivindicaciones 1 a 5, caracterizado por que se usan más de dos direcciones de emisión principales y de recepción principales (19, 22) distintas para obtener más de dos señales de recepción (Ri) , entre las que se selecciona la señal de recepción (Ri) con la mayor intensidad de señal (RSSIi) .
7. Procedimiento según una de las reivindicaciones 1 a 6, caracterizado por que se usa al menos una posición de recepción (Ei) adicional para recibir los rayos de radar (14) reflejados en las direcciones de recepción principales
(22) mencionadas para obtener señales de recepción (Ri) adicionales, seleccionándose de entre todas las señales de recepción (Ri) y señales de recepción (Ri) adicionales la señal de recepción (Ri) con la mayor intensidad de señal (RSSIi) .
8. Procedimiento según la reivindicación 7, caracterizado por que la posición de recepción (Ei) y la posición de recepción (Ei) adicional se encuentran en el plano (18) común mencionado.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado por que el plano (18) mencionado es transversal a la calzada (3) , preferentemente usando un puente de montaje (17) que atraviesa la calzada (3) y en el que se montan los emisores de radar (11) y los receptores de radar (13) para la emisión y la recepción de los rayos de radar..
10. Procedimiento según una de las reivindicaciones 1 a 9, caracterizado por que las direcciones de emisión principales y de recepción principales (19, 22) se ajustan mediante redes de antenas excitadas en fase o mediante la selección de antenas direccionales (a, b, c) individuales.
11. Procedimiento según una de las reivindicaciones 3 a 10, caracterizado por que se realizan mediciones de tiempo de propagación entre impulsos de emisión e impulsos de recepción (T, Ii) y a partir de las mismas se
determina la distancia de la superficie (4-8) con respecto a las posiciones de emisión y de recepción (S, Ei) , para mejorar la medición de posición.
12. Procedimiento según una de las reivindicaciones 1 a 10, caracterizado por que los rayos de radar (12, 14) son rayos de radar FMCW y a partir de estos se determina según el procedimiento FMCW la distancia de la superficie (48) con respecto a las posiciones de emisión y de recepción (S, E) , para mejorar la medición de posición.
13. Procedimiento según una de las reivindicaciones 1 a 10, caracterizado por que los rayos de radar (12, 14) son rayos de radar CW y a partir de estos se determina según un procedimiento de interferencia de fases la distancia de la superficie (4-8) con respecto a las posiciones de emisión y de recepción (S, E) , para mejorar la medición de medición..
14. Procedimiento según una de las reivindicaciones 1 a 10, caracterizado por que los rayos de radar (12, 14) son enviados y recibidos por emisores-receptores de radar (24) que se hacen funcionar respectivamente en multiplex por 15 división de código, de tiempo o de frecuencia opcionalmente como emisor (11) o receptor (13) .
15. Procedimiento según una de las reivindicaciones 1 a 14, caracterizado por que la frecuencia de los rayos de radar (12, 14) es de 1 GHz a 100 GHz, preferentemente de 50 GHz a 100 GHz.
Patentes similares o relacionadas:
Método de funcionamiento de un radar pasivo, del 10 de Junio de 2020, de HENSOLDT Sensors GmbH: Un método de funcionamiento de un radar pasivo, que comprende una unidad receptora para recibir una señal reflejada en un objetivo del radar […]
Sistema de radar, del 20 de Mayo de 2020, de Fincantieri S.p.A: Un sistema de radar , que comprende: - una antena de transmisión que comprende una pluralidad de conjuntos lineales (t1-t4) de elementos […]
Método para determinar información de tipo geométrico en dispositivos de redes en la banda de ondas milimétricas, del 27 de Septiembre de 2019, de FUNDACION IMDEA NETWORKS: Método para determinar información de tipo geométrico en dispositivos de redes en la banda de ondas milimétricas. Un método para determinar información geométrica de […]
Máquina teledirigida y/o autónoma para aplicación de fitosanitarios y tracción de aperos agrícolas, del 16 de Julio de 2019, de ROMERA MANZANO, Javier: 1. Máquina teledirigida y/o autónoma para aplicación de tratamientos fitosanitarios y tracción de aperos agrícolas caracterizada por un diseño modular compuesto […]
Dispositivo para determinar una posición de válvula de una válvula de admisión de un motor de combustión interna, del 4 de Julio de 2019, de ROBERT BOSCH GMBH: Dispositivo para determinar una posición de válvula de una válvula de admisión de un motor de combustión interna, que comprende un dispositivo de acoplamiento […]
Sistema y método de obtención de imágenes, del 19 de Junio de 2019, de TELEDYNE AUSTRALIA PTY LTD: Un sistema de obtención de imágenes de radar para capturar una imagen de un objeto dentro de un área de interés a través de al menos un impedimento visual, dicho sistema […]
Servicio basado en localización mejorado para situar objetos que intersecan en la cobertura de radio medida, del 5 de Junio de 2019, de Nokia Technologies OY: Un método, que comprende: obtener información con respecto a una o más características de una o más señales de radiofrecuencia [RF] monitorizadas transmitidas […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]