RADAR VIRTUAL.
Radar virtual, que incluye, al menos, una aeronave (AN), con emisor de datos en tiempo real;
un sistema de adquisición (BS) donde se recogen los datos de transmisiones en tiempo real con ayuda de receptores (C) y se envían a un servidor central (SC) al que llegan los datos de los diferentes receptores y donde son guardados en una base de datos; y un visualizador 3D (RV) que recibe los datos del servidor central (SC) y se encarga de representar la información recibida.De aplicación en controles de aeronaves
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200703003.
Solicitante: FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS
UNIVERSIDAD DEL PAIS VASCO/EUSKAL HERRIKO UNIBERTSITATEA
FUNDACION EUROPEAN VIRTUAL ENGINEERING FUNDAZIOA (EUVE).
Nacionalidad solicitante: España.
Provincia: ÁLAVA.
Inventor/es: VELA MARTINEZ,JUAN PEDRO, SAEZ DE OCARIZ GRANJA,IDURRE, ARANGUREN ARAMENDIA,GERARDO, RODRIGUEZ GOMEZ,MIGUEL, ZUBIA ZABALLA,JOSEBA, GARCIA SAEZ,IGNACIO, QUINTANA CARCEDO,DAVID, USATORRE IRAZUSTA,LUIS, ILLARO PAGAZAURTUNDUA,JON ANDONI.
Fecha de Solicitud: 14 de Noviembre de 2007.
Fecha de Publicación: .
Fecha de Concesión: 16 de Noviembre de 2010.
Clasificación Internacional de Patentes:
- G01S13/91 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para el control de tráfico (G01S 13/93 tiene prioridad).
- G08G5/00 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › Sistemas del control del tráfico aéreo.
- H04Q9/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04Q SELECCION (conmutadores, relés, selectores H01H; redes de comunicación inalámbricas H04W). › Disposiciones en sistemas de control a distancia o de telemetría para llamar selectivamente a una subestación a partir de una estación principal, subestación en la cual un aparato deseado es escogido para aplicar una señal de control o para obtener valores medidos.
Clasificación PCT:
- G01S13/91 G01S 13/00 […] › para el control de tráfico (G01S 13/93 tiene prioridad).
- G08G5/00 G08G […] › Sistemas del control del tráfico aéreo.
- H04Q9/00 H04Q […] › Disposiciones en sistemas de control a distancia o de telemetría para llamar selectivamente a una subestación a partir de una estación principal, subestación en la cual un aparato deseado es escogido para aplicar una señal de control o para obtener valores medidos.
Fragmento de la descripción:
Radar virtual.
El objeto del invento es un radar virtual.
En el actual estado de la técnica ya se conocen documentos de Patentes referidos a este campo de invención; pudiendo citarse, por ejemplo y entre otros, las Patentes WO200711379, US2002019720 y EP1625417, en una tecnología reciente.
Un primer objetivo de esta invención es poder visualizar en 3D toda la información transmitida por una aeronave, de una manera más intuitiva, eficaz, y aportando mayor información que las imágenes planas que existen en la actualidad de los radares.
Un segundo objetivo de esta invención es que la información recibida en una base, pueda ser compartida y vista en tiempo real por otros servidores alejados física y geográficamente.
En el radar virtual de acuerdo con el invento se plantea la visualización desde tierra o desde aire:
a) Si el visualizador está en tierra podemos ver las aeronaves volando dentro del área de cobertura de la estación receptora y las aeronaves en pista en modo taxi.
b) Si el visualizador esta a bordo de la aeronave, los pilotos, tripulación y pasajeros pueden ver el terreno en tiempo real y también las aeronaves circundantes.
Otro objetivo de esta invención es la visualización en entorno virtual tridimensional de archivos con trayectorias de vuelo de aeronaves con el objeto de identificar acciones incorrectas o causas de accidentes.
Para comprender mejor el objeto de la presente invención, se representa en los planos una forma preferente de realización práctica, susceptible de cambios accesorios que no desvirtúen su fundamento.
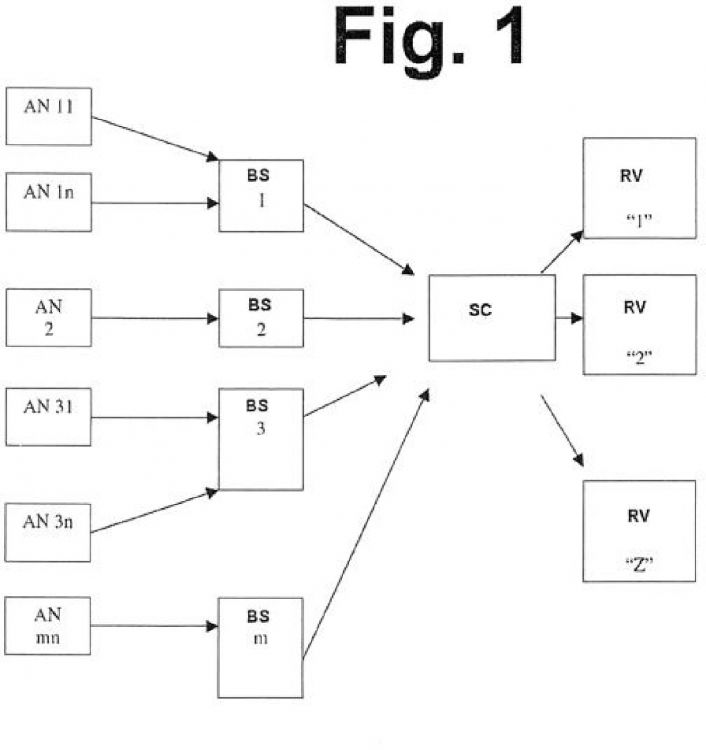
La figura 1 representa, de forma esquemática, un diagrama de bloques del radar virtual de acuerdo con el invento.
La figura 2 representa, de forma esquemática, la vista principal del visualizador 3D (RV) en la que se pueden ver las aeronaves (AN) que, en ese momento, se encuentran dentro del área de cobertura de los receptores (C).
La figura 3 representa, de forma esquemática, una vista lateral en el visualizador 3D (RV) de una aeronave (AN) con el receptor (C) situado exteriormente a ella.
La figura 4 representa, de forma esquemática, una vista aérea en el visualizador 3D (RV) con el receptor (C) situado en una aeronave (AN).
La figura 5 representa de forma esquemática, una vista aérea, con el receptor (C) situado en la cabina de la aeronave (AN) (-visualización vista desde un punto de vista muy similar al del piloto-).
La figura 6 representa, de forma esquemática, una vista terrestre con el receptor situado en la torre de control (TC) del aeropuerto (-vista desde un punto de visualización muy similar al de controlador-).
Se describe a continuación un ejemplo de realización práctica, no limitativa, del presente invento.
Como se puede ver en la figura 1, el radar virtual objeto del invento consta de cuatro capas diferenciadas:
• Aeronave (AN): Emisor de datos en tiempo real. La aeronave puede ser tripulada o no.
• Sistema adquisición (BS): En esta primera capa es donde se recogen los datos de las transmisiones en tiempo real con la ayuda del receptor (C). Estos datos se envían al Servidor Central (SC).
• Servidor Central (SC): Esta capa la compone un servidor central al que llegan los datos de los diferentes receptores (C) y donde son guardados en una base de datos.
• Visualizador 3D (RV): Esta capa recibe los datos del servidor central (SC) y se encarga de representar la información recibida.
Esta arquitectura contempla la posibilidad de que existan tantos receptores como se desee, y permite que se desarrollen múltiples aplicaciones orientadas a la representación de los datos recogidos de transmisiones. Estas aplicaciones lo único que necesitan es conectarse con el servidor (SC) para recoger la información que necesitan, pudiendo acceder a ella sólo las aplicaciones a las que se les haya dado acceso.
La transmisión de información entre las aeronaves (AN) y el sistema de adquisición (BS) se puede hacer de diversas formas.
• Mediante transpondedor radar
• Mediante redes públicas por ejemplo GSM o GPRS
• Mediante redes privadas por ejemplo TETRA.
• Mediante comunicaciones corto alcance por ejemplo WIFI, WIMAX, BLUETOOTH.
• Mediante normas de comunicación por ejemplo ADS-B o ADS-C.
Entre el sistema de adquisición (BS) y el servidor central (SC) la comunicación se realiza mediante redes que soporten Internet Protocol (IP). Dentro de ella, hay diferentes opciones, por ejemplo:
• Diferentes redes: Bluetooth, GPRS, Ethernet, WIFI, WIMAX...
• Diferentes medios de comunicación: Cable, infrarrojos, teléfono, radio...
Lo mismo entre el servidor central (SC) y el radar virtual (RV).
Todas las capas del sistema soportan diferentes configuraciones de puertos, de seguridad, de redes locales en función de su conexión o de su localización.
De acuerdo con un ejemplo de realización, el radar virtual objeto del invento incluye los siguientes equipos necesarios:
- Como emisor: Un ordenador a bordo para lectura de datos de posición y trayectoria de la aeronave (AN) y transpondedor para transmisión de los datos de la aeronave (AN) al receptor (RI). En este ejemplo de realización el transpondedor emite en norma ADS-B pero podría ser cualquier otro de los descritos en el apartado anterior.
- Como estación receptora: Para recoger los datos en tiempo real usamos un receptor de señales ADS-B y un ordenador por cada receptor (C) que se quiera situar. El ordenador almacena y envía la información recibida. El ordenador utiliza el software adecuado (un programa desarrollado en C# en este ejemplo, aunque podría ser otro lenguaje cualquiera de programación) que permite recoger en tiempo real los datos recibidos en el receptor de señal ADS-B.
- Como servidor: Un ordenador con software adecuado (para este ejemplo programa también desarrollado en C#, aunque podría ser otro lenguaje cualquiera de programación) que hace las veces de servidor central (SC). Recibe la información de diferentes Estaciones Receptoras, la almacena y la envía a los visualizadores.
- Como visualizados "radar virtual": Una aplicación desarrollada mediante el motor gráfico "3D Revolutions" (aunque se puede generar por ejemplo con otros motores gráficos o aplicaciones tipo "Google Earth"). El terreno que se ha generado consta de seis niveles de detalle, está distribuido bajo un sistema de celdas y es gestionado para que en cada momento se encuentre cargado el nivel adecuado y el mínimo de este terreno para que la aplicación no se vea ralentizada y ofrezca un resultado visual de calidad. Buscando el mayor realismo en la aplicación, se han utilizado ortofotos para las texturas que forman parte del terreno.
De entre todas las vistas que se pueden obtener con el radar virtual objeto del invento destacamos como ejemplo las siguientes:
En la vista principal se pueden ver las aeronaves (AN) que en ese momento se encuentran dentro del área de cobertura de los receptores (C). En azul se encuentran los que están ascendiendo, en rojo los que están descendiendo y en blanco el resto. En esta vista están contemplados los siguientes eventos:
- Si se sitúa el ratón sobre una aeronaves (AN) aparecerá una etiqueta con su callsign.
- Si se pulsa el botón derecho del ratón sobre una aeronaves (AN) aparecerá una ventana de información con el callsign, longitud, latitud y velocidad del avión. (Podemos mostrar más datos como dirección o cualquier otro que nos envíe la aeronave). Esta ventana se puede mostrar y ocultar en las tres vistas principales.
- Si se pulsa el botón izquierdo del ratón sobre una aeronave (AN) la aplicación pasa a mostrar su vista desde aeronave.
- Si se pulsa el botón izquierdo del ratón sobre un aeropuerto la aplicación pasa a mostrar su vista desde aeropuerto.
En la vista principal se puede hacer...
Reivindicaciones:
1. Radar virtual, caracterizado porque consta de cuatro capas diferenciadas:
a) aeronave (AN), con emisor de datos en tiempo real
b) sistema de adquisición (BS) donde se recogen los datos de transmisiones en tiempo real con ayuda de receptores (C) y se envían a
c) servidor central (SC) al que llegan los datos de los diferentes receptores y donde son guardados en una base de datos;
d) visualizador 3D (RV) que recibe los datos del servidor central (SC) y se encarga de representar la información recibida.
2. Radar virtual, según reivindicación 1, caracterizado porque dispone una pluralidad de sistemas de adquisición (BS) dependientes/comunicados con el servidor central (SC), cada uno de los cuales, recogen datos de transmisiones en tiempo real de una pluralidad de aeronaves (AN).
3. Radar virtual, según reivindicación 1, caracterizado porque el visualizador 3D (RV) presenta una visualización en entorno virtual tridimensional de la posición, velocidad y trayectoria de aeronaves (AN).
4. Radar virtual, según reivindicación 1, caracterizado porque el visualizador 3D (RV) presenta una visualización en entorno virtual tridimensional del terreno en tiempo real desde el punto de vista del piloto de la aeronave (AN).
5. Radar virtual, según reivindicación 1, caracterizado porque el visualizador 3D (RV) presenta una visualización en entorno virtual tridimensional del terreno en tiempo real desde el punto de vista de la torre de control (TC) o del receptor de señal (C).
6. Radar virtual, según reivindicación 1, caracterizado porque la transmisión de datos se recibe de las aeronaves (AN) vía redes que soporten Internet Protocol (IP) para su almacenamiento en servidor central (SC).
7. Radar virtual, según reivindicación 1, caracterizado porque la transmisión de datos desde un servidor central (SC) a un visualizador 3D se efectúa vía redes que soporten Internet Protocol (IP) para visualización de aeronaves (AN) alejadas física y geográficamente del centro de visualización.
8. Radar virtual, según reivindicación 1, caracterizado porque la visualización en entorno virtual tridimensional de la posición, velocidad y trayectoria de aeronaves (AN) es independiente de la localización de las aeronaves (AN) y de la posición del visualizador 3D (RV).
9. Radar virtual, según reivindicación 1, caracterizado porque la visualización en entorno virtual tridimensional de archivos con trayectorias de vuelo de aeronaves (AN).
10. Radar virtual, según reivindicación 1, caracterizado porque el visualizador 3D (RV) se dispone en entorno virtual tridimensional de aviones en pista en modo taxi.
11. Radar virtual, según reivindicación 1, caracterizado porque el visualizador 3D (RV) se dispone a bordo de la aeronave (AN) para que piloto, tripulación o pasajeros puedan ver el terreno virtual en tiempo real y también las aeronaves (AN) circundantes.
Patentes similares o relacionadas:
Sistema para el control de equipo hidráulico móvil, del 17 de Junio de 2020, de Magnetek Inc: Controlador configurable para operar diferentes equipos hidráulicos móviles, según los requisitos de diferentes aplicaciones, comprendiendo el controlador: […]
Dispositivo de monitorización y de mando para una unidad de puerta, del 6 de Mayo de 2020, de Fraba B.V: Dispositivo de monitorización y de mando para un elemento de puerta , como por ejemplo una puerta enrollable o seccional que puede moverse por medio […]
Sistema de control de acondicionamiento de aire para controlar múltiples dispositivos de acondicionamiento de aire, del 6 de Mayo de 2020, de DAIKIN INDUSTRIES, LTD.: Un sistema de control de aire acondicionado que comprende: dispositivos de aire acondicionado que están configurados para acondicionar el aire de un solo espacio y […]
Terminal de funcionamiento para acondicionador de aire, del 8 de Abril de 2020, de MITSUBISHI ELECTRIC CORPORATION: Un terminal de funcionamiento (100a, 100b) que es capaz de controlar un acondicionador de aire que incluye un dispositivo interior y un dispositivo […]
Método para configurar un contador de medición inteligente, del 1 de Abril de 2020, de Diehl Metering Systems GmbH: Método para configurar un contador en una red de medición inteligente a través del ajuste de sus parámetros de radio para la emisión de paquetes […]
Sistema de supervisión de un equipo de una aeronave, del 18 de Marzo de 2020, de Safran Electronics & Defense: Sistema de supervisión de un equipo de una aeronave que incluye un módulo electrónico principal y un módulo electrónico subordinado equipados […]
Sistema de medición y procedimiento de medición para la detección de variables sobre soportes planetarios de un engranaje planetario, del 19 de Febrero de 2020, de Flender GmbH: Sistema de medición para la detección de variables sobre soportes planetarios de un engranaje planetario que comprende al menos varios pasos de rueda planetaria […]
Sistema de irradiador de luz de bajo nivel de tipo adhesivo para la piel basado en tecnología PAMS que usa un dispositivo de comunicación móvil, del 19 de Febrero de 2020, de Color Seven.Co., Ltd: Un sistema de irradiador de luz de bajo nivel de tipo adhesivo para la piel basado en tecnología de modulación fotoactivada de músculos lisos (PAMS) usando […]