Actuador inercial aeroespacial.
1. Actuador Inercial Aeroespacial caracterizado por constar de:
- Conjunto Giroscópico Principal.
- Rueda de Reacción o Conjunto Giroscópico Secundario.
- Medios Electrónicos de Cálculo y Mando.
- Medios Mecánicos de Soporte y Sujeción.
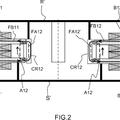
2. Actuador Inercial Aeroespacial según Reivindicación - 1 caracterizado por poseer un Conjunto Giroscópico Principal provisto de dos giróscopos de par (CMG), que cumplen las siguientes condiciones:
- Cada giróscopo está provisto de rotor, motor de espín, motor de nutación y soporte.
- Los ejes de nutación de ambos giróscopos son paralelos y están dirigidos según la dirección del eje de apuntamiento del vehículo portador. Estos giróscopos producen un vector par de control, de dirección fija conocida, situado en el plano normal a su eje de nutación.
- La distancia entre los ejes de nutación puede ser cualquiera compatible con el resto de equipos del vehículo portador.
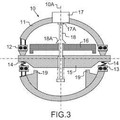
3. Actuador Inercial Aeroespacial según Reivindicación - 1 caracterizado por poseer una Rueda de Reacción (RW) que cumple con las siguientes condiciones:
- Está dotada de rotor, motor de espín y soporte.
- El eje de la rueda de reacción es paralelo a las de nutación del conjunto giroscópico y por tanto también paralelo a la dirección de apuntamiento del vehículo portador, produciendo la tercera componente en el espacio, rotación, del par de control.
4. Actuador Inercial Aeroespacial según Reivindicaciones - 1 y 2 donde hay un Conjunto Giroscópico Secundario similar al Conjunto Giroscópico Principal, pero de diferentes dimensiones y situado en una posición tal que generará pares en la misma dirección de la Rueda de Reacción, a la que sustituye.
5. Actuador Inercial Aeroespacial según Reivindicaciones - 1 o 4 caracterizado por poseer Medios Electrónicos de Cálculo y Mando compuesto por un Microprocesador con software y conexiones con capacidad para aceptar, elaborar y suministrar las órdenes al resto de equipos del propio actuador.
6. Actuador Inercial Aeroespacial según Reivindicaciones - 1 o 4 caracterizado por poseer Medios Mecánicos de soporte y sujeción de los componentes del propio actuador entre si y al vehículo portador y capaces de transmitirle los pares generados.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201800317.
Solicitante: SANZ-ARANGUEZ SANZ , Pedro.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: SANZ-ARANGUEZ SANZ,Pedro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64G1/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › que utilizan la inercia o el efecto giroscópico.
PDF original: ES-1215425_U.pdf
Patentes similares o relacionadas:
 Dispositivo de centrador de rodamiento magnético con dos conjuntos de bobinado y de imanes en el estátor y sin imán en el rotor, del 28 de Agosto de 2019, de THALES: Dispositivo de centrador magnético que incluye:
• un cuerpo móvil, llamado rotor (R'), que incluye una corona de acero que comprende una estructura mecánica y […]
Dispositivo de centrador de rodamiento magnético con dos conjuntos de bobinado y de imanes en el estátor y sin imán en el rotor, del 28 de Agosto de 2019, de THALES: Dispositivo de centrador magnético que incluye:
• un cuerpo móvil, llamado rotor (R'), que incluye una corona de acero que comprende una estructura mecánica y […]
Dispositivo y procedimiento de determinación de actitud de un satélite, y satélite que incorpora dicho dispositivo, del 25 de Abril de 2019, de Airbus Defence and Space SAS: Dispositivo de determinación de una actitud o de una variación de actitud de un satélite , estando provisto el citado satélite de un sistema […]
Control de posición para aplicaciones ágiles de satélite, del 26 de Diciembre de 2018, de Thales Alenia Space Italia S.p.A. Con Unico Socio: Un conjunto de giróscopo de momento de control , que incluye varios giróscopos de momento de control , y que está caracterizado […]
Maniobras de adquisición de una nave espacial usando un control sin giroscopio basado en la posición, del 4 de Octubre de 2017, de THE BOEING COMPANY: Un sistema para un control sin giroscopio de la actitud de una nave espacial basándose en mediciones de actitud y no mediciones del ritmo de cambio, caracterizado por […]
Disposición motriz, del 4 de Enero de 2017, de Innovative Motion GmbH: Disposición motriz que contiene: (a) una masa rotatoria que está alojada con posibilidad de rotación alrededor de un primer eje, (b) un elemento de […]
Procedimiento de mando de un sistema de control de posición y sistema de control de posición de un vehículo espacial, del 14 de Enero de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Procedimiento de mando de un sistema de control de posición de un vehículo espacial , comprendiendo el sistema de control de posición un subsistema […]
 Dispositivo de sujeción de al menos un objeto móvil, reutilizable, seguro de forma autónoma y sin choques, para ingenios espaciales, del 21 de Agosto de 2013, de THALES: Dispositivo de sujeción reutilizable y seguro para al menos un objeto frágil, sensible a los choques y aceleracionesdurante al menos una fase operativa […]
Dispositivo de sujeción de al menos un objeto móvil, reutilizable, seguro de forma autónoma y sin choques, para ingenios espaciales, del 21 de Agosto de 2013, de THALES: Dispositivo de sujeción reutilizable y seguro para al menos un objeto frágil, sensible a los choques y aceleracionesdurante al menos una fase operativa […]
GIRODINO Y SU DISPOSITIVO DE MONTAJE, del 11 de Enero de 2011, de ASTRIUM SAS: Girodino que comprende una rueda de inercia montada, por medio de un soporte de rueda , sobre la parte móvil o rotor de un conjunto de cardán que comprende […]