Generación de mapa de campo magnético para posicionamiento en interiores.
Un aparato (400; 500) para generar un mapa (440; 540) de campo magnético de interior para un edificio (100),
que comprende al menos un procesador (402; 502) y al menos una memoria (404; 504) que incluye un código de programa informático, donde la al menos una memoria (404; 504) y el código de programa informático están configurados para, con el al menos un procesador (402; 502), hacer que el aparato (400; 500) al menos: obtenga información que indica un vector de campo magnético medido en al menos una ubicación conocida dentro del edificio (100), donde el vector de campo magnético medido representa magnitud y dirección del campo magnético terrestre (208) afectado por las estructuras locales del edificio (100), y en el cual la al menos una ubicación conocida está definida en un sistema de referencia de un plano de planta (442; 542) del edificio (100); y
genere el mapa (440; 540) de campo magnético de interior para al menos una parte del edificio (100) sobre la base de al menos la información obtenida que indica el vector de campo magnético medido en la al menos una ubicación conocida dentro del edificio (100) y el plano de planta (442; 542), donde el mapa (440; 540) de campo magnético de interior comprende el vector de campo magnético medido para la al menos una ubicación conocida dentro del edificio (100);
caracterizado por que la al menos una memoria (404; 504) y el código de programa informático están además configurados para, con el al menos un procesador (402; 502), hacer que el aparato (400; 500) además:
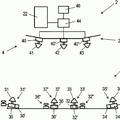
obtenga la información que indica el vector de campo magnético medido en la al menos una ubicación conocida dentro del edificio (100) a partir de al menos dos dispositivos (400A, 400B) de medida diferentes;
combine la información obtenida que indica el vector de campo magnético medido en la al menos una ubicación conocida dentro del edificio (100) para representar el vector de campo magnético medido y una medida de incertidumbre del vector de campo magnético medido en la al menos una ubicación conocida dentro del edificio (100), donde la medida de incertidumbre representa al menos uno de entre incertidumbre de la magnitud del vector de campo magnético e incertidumbre de la dirección del vector de campo magnético e indica fiabilidad específica para la ubicación del vector de campo magnético medido en la al menos una ubicación conocida;
donde la generación del mapa de campo magnético de interior para la al menos parte del edificio (100) está basada además en la información relacionada con la medida de incertidumbre del vector de campo magnético medido en la al menos una ubicación conocida dentro del edificio (100), y donde el mapa de campo magnético de interior comprende además la medida de incertidumbre del vector de campo magnético medido para la al menos una ubicación conocida dentro del edificio (100).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13150083.
Solicitante: IndoorAtlas Oy.
Nacionalidad solicitante: Finlandia.
Dirección: Elektroniikkatie 3 90590 Oulu FINLANDIA.
Inventor/es: HAVERINEN,JANNE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Instrumentos para efectuar cálculos de navegación (G01C 21/24, G01C 21/26 tienen preferencia).
- G01S5/16 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2651266_T3.pdf
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
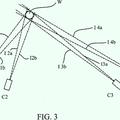 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]