Unidad de manipulación para paletización.
Unidad de manipulación (1) para paletización, que comprende: -un soporte (2) para acoplarse a unos medios manipuladores;
-un bastidor (3) asociado con dicho soporte (2) y que define una abertura; -un par de raíles de deslizamiento (5) opuestos paralelos fijados a dicho bastidor (3); -por lo menos un panel deslizante flexible (7) que se puede desplazar a lo largo de dichos raíles (5) entre una posición extendida en la que cierra completamente dicha abertura para permitir que ésta soporte unos artículos que se van a paletizar, y una posición retraída en la que abre dicha abertura para permitir que dichos artículos caigan a través de dicha abertura; -unos medios de accionamiento (18, 19) para hacer que se deslice dicho panel (7) a lo largo de dichos raíles (5), caracterizada porque dicho par de raíles de deslizamiento (5) opuestos paralelos comprenden una primera sección que se extiende a lo largo de dos partes circunferenciales opuestas y una segunda sección que se extiende a lo largo de dos partes horizontales opuestas, ocupando dicho panel deslizante (7) sólo la primera sección que se extiende a lo largo de las dos partes circunferenciales cuando está en su posición retraída.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2005/001124.
Solicitante: Blue Horizon GmbH & Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Friedensstrasse 17B 63533 Mainhausen ALEMANIA.
Inventor/es: BOLZANI,DANTE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G57/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › Válvulas o puertas para soltar los objetos.
Fragmento de la descripción:
Unidad de manipulación para paletización Campo técnico La presente invención se refiere a una unidad de manipulación para paletización. Más particularmente, la presente invención se refiere a una unidad manipulada por un sistema de transferencia (por ejemplo, una grúa de pórtico o un robot) para la paletización automática rápida de mercancías.
Técnica anterior
La paletización consiste en organizar la disposición y empaquetado de mercancías de tal modo que sea posible 15 utilizar palets de carga en el transporte y almacenamiento de mercancías.
Para la paletización, es conocido el uso de paletizadores que comprenden unidades independientes que realizan actividades específicas necesarias para completar la paletización.
El documento EP 1 457 442 da a conocer una unidad de manipulación para paletización con una persiana. Una unidad de manipulación para paletización según el preámbulo de la reivindicación 1 se da a conocer en el documento FR-A-2427977.
Exposición de la invención
El objetivo de la presente invención es proporcionar una unidad de manipulación para paletización de acuerdo con la reivindicación 1.
Las reivindicaciones subordinadas definen formas de realización preferidas particularmente ventajosas de la unidad 30 de manipulación de la invención.
Breve descripción de los dibujos
Otras características y ventajas de la invención se pondrán de manifiesto al leer la siguiente descripción 35 proporcionada a título de ejemplo no limitativo, con ayuda de las figuras representadas en los dibujos adjuntos, en los cuales:
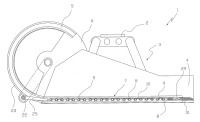
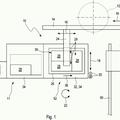
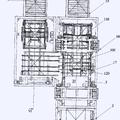
La figura 1 es una vista lateral de una unidad de manipulación según la invención, con su panel deslizante representado en sección en la posición extendida; 40 La figura 2 muestra la unidad de la figura 1 con su panel deslizante en la posición retraída;
La figura 3 es una sección por la línea III-III de la figura 2;
Las figuras 4A y 4B muestran detalles ampliados de la figura 3;
La figura 5 muestra un estadio de carga de la unidad de la figura 1;
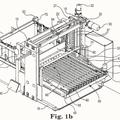
La figura 6 muestra una segunda forma de realización de la unidad de manipulación de la invención;
La figura 7 es una vista esquemática de la unidad de la figura 1 desde arriba, con el carro de carga en su posición sobresaliente;
La figura 8 es una vista frontal esquemática de la unidad 1 provista de medios para recoger y liberar láminas de 55 deslizamiento.
Las figuras 9 y 10 son una vista lateral de los medios de agarre y liberación de un contorno, con el contorno mostrado elevado y por elevar, respectivamente.
Mejor modo de poner en práctica la invención
Haciendo referencia a dichas figuras, el número de referencia 1 designa en su conjunto una unidad de manipulación según la presente invención.
Dicha unidad de manipulación 1 comprende un soporte 2 para acoplarse a unos medios manipuladores, tales como una grúa de pórtico o un robot, no mostrados, accionados por una unidad de control controlada por un software adecuadamente programado.
La unidad 1 comprende un bastidor, indicado en su conjunto con 3, que define inferiormente una abertura para la caída de artículos a paletizar.
Dicho bastidor 3 comprende un par de paredes laterales opuestas 4 que se extienden verticalmente, de las cuales sólo una es visible en las figuras, asociadas con el soporte de acoplamiento 2 y dispuestas paralelas una a otra.
Según la presente invención, el bastidor 3 está provisto de un par de raíles paralelos opuestos 5, extendiéndose una primera sección de éstos a lo largo de dos partes circunferenciales y una segunda sección horizontalmente a lo largo de las dos paredes laterales 4.
Preferentemente, la primera sección del raíl, que se extiende a lo largo de la parte circunferencial, es externa a las dos paredes laterales 4 y coaxial a un par de paredes de protección circulares 6.
En el ejemplo, cada raíl 5 tiene la forma de una ranura de deslizamiento en forma de C.
Las ranuras opuestas 5 alojan un panel deslizante en forma de una persiana enrollable 7 capaz de deslizarse entre una posición extendida (figura 1) en la que se cierra completamente la abertura inferior del bastidor 3, y una posición retraída (figura 2) en la que se abre esta abertura.
Cuando está en su posición extendida, la persiana enrollable 7 es capaz de manipular una carga de artículos posicionados sobre ella; al pasar de su posición extendida a su posición retraída, la persiana enrollable 7 libera los artículos a paletizar a través de la abertura inferior del bastidor 3.
La persiana enrollable 7 se hace deslizar por medios de accionamiento adecuados descritos con detalle más adelante.
Según una forma de realización preferida de la presente invención, la persiana enrollable 7 comprende una pluralidad de barras o vástagos tubulares paralelos 8 conectados entre sí por dos series opuestas de eslabones 9, 10 de cadena mutuamente desplazados (figura 3) .
Dichos eslabones de cadena tienen la forma de una primera serie de bloques 9 que conectan entre sí pares consecutivos de vástagos 8 y una segunda serie de bloques 10 desplazados respecto de los bloques 9 de la primera serie y que conectan entre sí los dos vástagos adyacentes 8 de un par y del siguiente par conectados entre sí por los bloques 9 de la primera serie (figura 4A) .
Como puede observarse en la figura 4B, un casquillo 11 está insertado con ajuste exacto en cada extremo de los vástagos 8, permitiendo que el bloque 9 se fije por un pasador 12 que presenta en la parte central de su longitud axial un asiento de chaveta 13 que hace tope contra el bloque 9, que tiene forma de copa en la región en la que está en contacto con el extremo del vástago 8.
En la parte del pasador 12 distante de la atornillada en el casquillo 11 están montados, comenzando por el asiento de chaveta 13, una arandela 14, el bloque 10, un espaciador 15, un cojinete 16 y, finalmente, un tornillo de sujeción 17 atornillado en una cavidad roscada dispuesta en el extremo del pasador 12 opuesto al atornillado en el casquillo 11.
Los cojinetes 16 permiten que la persiana enrollable se deslice dentro de las guías 5 con menos fricción.
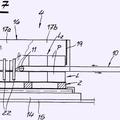
Según la presente invención, los medios de accionamiento tienen la forma de un motor reductor 18 (figura 4A) que hace que gire un primer piñón 19 de accionamiento móvil que engrana con una primera cremallera fija 20 que lleva una de las dos primeras secciones circunferenciales del raíl 5 y que se extiende perimetralmente alrededor de uno 55 de los dos elementos circulares 6. El primer piñón de accionamiento 19 está axialmente enchavetado en el extremo de una barra o árbol 21 de accionamiento, en cuyo extremo opuesto está enchavetado un segundo piñón de accionamiento móvil 22 que engrana con una segunda cremallera fija 23, paralela a la primera cremallera 20, que lleva la otra primera sección circunferencial del raíl 5 y que se extiende perimetralmente alrededor del otro elemento circular 6.
Los piñones 19, 22 se mantienen constantemente engranados con la primera cremallera 20 y la segunda cremallera 23, respectivamente, por un par de brazos rígidos 24 que actúan como espaciadores, asociados giratoriamente, de acuerdo con la técnica conocida, con los centros respectivos de los elementos circulares opuestos 6 concéntricos con la parte circunferencial de la primera secciones de los raíles 5.
Los piñones 19, 22 están asociados con la persiana enrollable 7 a través de un par de barras de conexión opuestas 25 (figuras 1, 2) .
Esencialmente, se hace deslizar a la persiana enrollable 7 a lo largo de las ranuras 5 girando los piñones de 5 accionamiento 19 y 22, que giran a lo largo de las cremalleras 20, 23 para arrastrar la persiana enrollable 7 conectado al árbol 21 por las barras de conexión 25.
Para permitir que el árbol de accionamiento del motor reductor 18, directamente enchavetado sobre el primer piñón de accionamiento 19, gire no sólo alrededor de su propio eje, sino también alrededor del eje de los elementos circulares 6, como en el caso de los piñones 19, 22, el motor reductor 18 está fijado a uno de los brazos 24 por una pieza de soporte 26 (figura 4A) interpuesta entre uno de los dos brazos 24 y el motor reductor 18.
Para permitir que los artículos, por ejemplo botellas de plástico recogidas en grupos, sean cargados más fácilmente sobre la superficie formada por la persiana enrollable 7 extendida, puede usarse una canaleta 29 asociada con el extremo libre de la persiana enrollable 7 y, por tanto, deslizable con ésta; cuando está en la posición extendida, la canaleta...
Reivindicaciones:
1. Unidad de manipulación (1) para paletización, que comprende:
-un soporte (2) para acoplarse a unos medios manipuladores;
- un bastidor (3) asociado con dicho soporte (2) y que define una abertura;
- un par de raíles de deslizamiento (5) opuestos paralelos fijados a dicho bastidor (3) ;
- por lo menos un panel deslizante flexible (7) que se puede deslizar a lo largo de dichos raíles (5) entre una posición extendida, en la que cierra completamente dicha abertura para permitir que ésta soporte unos artículos que se van a paletizar, y una posición retraída, en la que abre dicha abertura para permitir que dichos artículos caigan a través de dicha abertura;
- unos medios de accionamiento (18, 19) para hacer que se deslice dicho panel (7) a lo largo de dichos raíles (5) , en la que dicho par de raíles de deslizamiento (5) opuestos paralelos comprenden una primera sección que se extiende a lo largo de dos partes circunferenciales opuestas y una segunda sección que se extiende a lo largo de 20 dos partes horizontales opuestas, ocupando dicho panel deslizante (7) sólo la primera sección que se extiende a lo largo de las dos partes circunferenciales cuando está en su posición retraída, caracterizada por que dichos medios de accionamiento comprenden por lo menos un motor móvil (18) que hace girar un primer piñón de accionamiento móvil (19) que engrana con una primera cremallera circunferencial fija (20) con la que está asociada una de las partes circunferenciales opuestas de la primera sección de los raíles (5) , y en la que dicho primer piñón de accionamiento (19) está axialmente enchavetado por medio de un árbol (21) con un segundo piñón móvil (22) que engrana con una segunda cremallera circunferencial fija (23) con la que están asociadas las partes circunferenciales opuestas restantes de la primera sección de los raíles (5) .
2. Unidad de manipulación (1) según la reivindicación 1, en la que dicho panel deslizante (7) ocupa sólo la segunda 30 sección que se extiende a lo largo de las dos partes horizontales cuando está en la posición extendida.
3. Unidad de manipulación (1) según la reivindicación 1, en la que dicho bastidor (3) comprende un par de paredes laterales verticales opuestas (4) que definen dicha abertura.
4. Unidad de manipulación (1) según la reivindicación 3, en la que dichas partes horizontales de la segunda sección de los raíles (5) están fijadas a los lados interiores del par de paredes laterales (4) .
5. Unidad de manipulación (1) según la reivindicación 1, en la que dicho primer piñón (19) y dicho segundo piñón (22) se mantienen constantemente engranados con dicha primera cremallera (20) y con dicha segunda cremallera (23) , respectivamente, por medio de un par de brazos rígidos (24) asociados giratoriamente con un par de elementos circulares (6) coaxiales con las partes circunferenciales de la primera sección de los raíles (5) .
6. Unidad de manipulación (1) según la reivindicación 5, en la que dicho primer piñón (19) y dicho segundo piñón (22) están asociados respectivamente con un extremo de dicho panel deslizante (7) por medio de un par de barras 45 de conexión opuestas (25) .
7. Unidad de manipulación (1) según la reivindicación 1, en la que dicho panel deslizante comprende una pluralidad de vástagos cilíndricos paralelos transversales a la dirección de deslizamiento, conectados entre sí a pares por unos eslabones de cadena decalados (9, 10) .
8. Unidad de manipulación (1) según la reivindicación 7, en la que los extremos de dichos vástagos (8) están asociados giratoriamente con unas ruedas (16) que giran dentro de dichos raíles (5) .
9. Unidad de manipulación (1) según la reivindicación 1, que comprende un par de paneles deslizantes (7)
mutuamente enfrentados que se pueden deslizar a lo largo de un par de raíles mutuamente enfrentados (5) entre una posición en la que dichos paneles (7) están posicionados de manera que hacen tope uno con otro para cerrar completamente dicha abertura, y una posición retraída en la que dichos paneles han sido mutuamente retirados para abrir dicha abertura.
10. Unidad de manipulación (1) según la reivindicación 1, en la que dichos medios manipuladores comprenden un robot.
11. Unidad de manipulación (1) según la reivindicación 1, que comprende unos medios de carga para arrastrar unos artículos que se van a paletizar hasta dejarlos sobre dicho panel (7) cuando éste está en su posición extendida. 65
12. Unidad de manipulación (1) según la reivindicación 11, en la que dichos medios de carga comprenden un carro de carga (32) asociado de manera que se puede deslizar con el bastidor (3) .
13. Unidad de manipulación (1) según la reivindicación 12, en la que dicho carro de carga (32) presenta una 5 configuración cuadrangular con sus lados opuestos ajustables para acercarse y alejarse entre sí.
14. Unidad de manipulación (1) según la reivindicación 1, que comprende asimismo unos medios para agarrar y liberar láminas de deslizamiento.
15. Unidad de manipulación (1) según la reivindicación 14, en la que dichos medios para recoger y liberar láminas de deslizamiento comprenden una estructura de pantógrafo (40) que soporta una pluralidad de ventosas (45) para adherirse a la superficie de una lámina de deslizamiento (200) .
16. Unidad de manipulación (1) según la reivindicación 15, en la que dichas ventosas (45) están asociadas con unas 15 válvulas venturi (45) para crear vacío dentro de las cavidades de las ventosas (45) .
17. Unidad de manipulación (1) según la reivindicación 15, en la que cada ventosa (45) es accionada por un cilindro (55) .
18. Unidad de manipulación (1) según la reivindicación 1, que comprende asimismo unos medios para recoger y liberar los contornos.
19. Unidad de manipulación (1) según la reivindicación 18, en la que dichos medios para recoger y liberar contornos comprenden dos pares opuestos de elementos de basculación (60) con los que están asociados unos medios (68) 25 para acoplarse al contorno.
20. Unidad de manipulación (1) según la reivindicación 19, en la que dichos elementos de basculación (60) son pivotados sobre un par de placas (62) que pueden se desplazadas hacia arriba alejándose de la abertura y hacia abajo acercándose a la abertura.
21. Robot paletizador, que comprende una unidad de manipulación según la reivindicación 1.
Patentes similares o relacionadas:
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
 Aparato y método para apilar artículos, del 11 de Octubre de 2018, de Alliance Machine Systems International, LLC: Un método para apilar objetos, que comprende las etapas de:
- recibir un primer objeto en una pluralidad de horquillas , de una mesa que está conectada […]
Aparato y método para apilar artículos, del 11 de Octubre de 2018, de Alliance Machine Systems International, LLC: Un método para apilar objetos, que comprende las etapas de:
- recibir un primer objeto en una pluralidad de horquillas , de una mesa que está conectada […]
Paletizador, del 31 de Mayo de 2017, de SWISSLOG AG: Un dispositivo de agarre que comprende un bastidor de soporte provisto de, como mínimo, una fila de elementos de horquilla que comprenden […]
Dispositivo y método para empilar capas en un soporte, del 10 de Agosto de 2016, de Dematic GmbH: Dispositivo para apilar automáticamente artículos embalados en un soporte en una disposición física predeterminada para formar una pila, que tiene: - Al menos un […]
Procedimiento para el manejo de artículos, del 13 de Abril de 2016, de KRONES AKTIENGESELLSCHAFT: Procedimiento para el manejo de artículos mediante una estación de carga que incluye un cabezal de persiana con una abertura […]
 Dispositivo y procedimiento para la deposición de una serie de paquetes formada por al menos un paquete sobre una plataforma de carga, del 3 de Marzo de 2016, de SEGBERT GMBH & CO. KG: Dispositivo para la deposición de una serie de paquetes (R, R1, R2, R3, R4) formada por al menos un paquete P sobre una plataforma de carga , con […]
Dispositivo y procedimiento para la deposición de una serie de paquetes formada por al menos un paquete sobre una plataforma de carga, del 3 de Marzo de 2016, de SEGBERT GMBH & CO. KG: Dispositivo para la deposición de una serie de paquetes (R, R1, R2, R3, R4) formada por al menos un paquete P sobre una plataforma de carga , con […]
 Dispositivo para el transporte y la manipulación de productos, del 27 de Enero de 2016, de Langhammer GmbH: Procedimiento para la manipulación de productos en una instalación de manipulación de productos que comprende las siguientes etapas de procedimiento:
[…]
Dispositivo para el transporte y la manipulación de productos, del 27 de Enero de 2016, de Langhammer GmbH: Procedimiento para la manipulación de productos en una instalación de manipulación de productos que comprende las siguientes etapas de procedimiento:
[…]
 Dispositivo de paletización, del 13 de Enero de 2016, de A.C.M.I. - Societa' Per Azioni: Dispositivo de paletización , que comprende un plano inferior capaz de recibir a modo de soporte un palé y un dispositivo de carga verticalmente […]
Dispositivo de paletización, del 13 de Enero de 2016, de A.C.M.I. - Societa' Per Azioni: Dispositivo de paletización , que comprende un plano inferior capaz de recibir a modo de soporte un palé y un dispositivo de carga verticalmente […]