Aparato y procedimiento para manipular grupos de objetos en una instalación de paletización.
Aparato para la manipulación de grupos de objetos en una instalación para la paletización de objetos quecomprende:
una cinta transportadora (10), de la cual una rama de transporte (12) presenta en el extremo aguas abajo de lamisma una pista final (13) que define una superficie de apoyo para soportar un grupo (N) de objetos en una estaciónde transferencia (T);
un cabezal de manipulación (40) que presenta un plano de soporte flexible (41), estando el plano de soporte (41)adaptado para deslizar horizontalmente a lo largo de unas guías de deslizamiento (42), por debajo del grupo (N) deobjetos en la estación de transferencia (T) hasta que forma una superficie de soporte para el grupo de objetos,estando el extremo delantero (43) del plano de soporte colocado de manera adyacente al extremo (13a) de la pistafinal (13), caracterizado porque un extremo (13a) de la pista final (13) se puede desplazar en una direcciónlongitudinal entre una posición avanzada, en la cual la pista final (13) constituye una superficie de apoyo para elgrupo (N) de objetos, y una posición retraída en la cual la pista final (13) no constituye una posición de apoyo para elgrupo de objetos, estando el extremo (13a) adaptado para pasar de la posición avanzada a la posición retraída deforma contemporánea y sincronizada con el avance del plano de soporte (41) por debajo del grupo de objetos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10188642.
Solicitante: ZECCHETTI S.R.L.
Inventor/es: Giovanelli,Mauro, Rocchetta,Paolo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G57/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › Válvulas o puertas para soltar los objetos.
- B65G57/24 B65G 57/00 […] › siendo las capas transferidas como un conjunto, p. ej. sobre pallets.
PDF original: ES-2386707_T3.pdf
Fragmento de la descripción:
Aparato y procedimiento para manipular grupos de objetos en una instalación de paletización.
La presente invención se refiere a una instalación para la paletización de objetos.
En muchas instalaciones para la paletización de objetos relativamente pequeños (por ejemplo botellas, viales, tarros
o bien otros objetos relativamente pequeños) , las operaciones incluyen primero la formación de grupos de objetos y después la transferencia de cada grupo de objetos uno cada vez sobre una base de palet, el apilado de los objetos de un modo ordenado uno encima de otro por medio de un cabezal de manipulación activado por medios de accionamiento de diversos tipos, típicamente mediante un robot.
La invención específicamente se refiere a un aparato y al procedimiento para la manipulación de grupos de objetos.
Para este propósito, es conocido un aparato el cual comprende una cinta transportadora de banda, una rama del transportador la cual presenta una pista final que define una superficie de apoyo para un grupo de objetos y un cabezal de manipulación que presenta un plano de soporte flexible, el cual desliza a lo largo de guías provistas en el cabezal de manipulación, un extremo delantero del plano de soporte flexible deslizando horizontalmente por debajo de la capa de objetos, formando de ese modo una placa de soporte para el grupo de objetos.
Una solución de este tipo se ilustra en el documento EP 1 724 219, en el cual el cabezal de paletización comprende un bastidor, el bastidor estando provisto de un soporte superior que tiene un orificio inferior al cual está asociado un plano móvil de rejilla para sostener los artículos, plano el cual es capaz, mediante el deslizamiento en carriles de guía, de pasar desde una posición lateral vertical hasta una posición en la cual cierra la base inferior horizontal del cabezal. Después de que el cabezal, en el cual el plano de soporte móvil está en una posición lateral, ha sido colocado sobre la pista final del transportador de banda, rodeando de ese modo al grupo de objetos, el grupo de objetos es agarrado por medios impulsores horizontales y longitudinales llevados por el cabezal y el cabezal es trasladado horizontalmente en el sentido de avance del transportador, de tal modo que arrastra la capa de objetos alejándola de la cinta. A medida que la capa de objetos gradualmente deja la cinta, el plano móvil de rejilla se hace que deslice de tal modo que sea llevado por debajo de los objetos. La velocidad de activación del plano de rejilla debe ser la misma que la velocidad de traslación del cabezal, de tal modo que se transfieran los productos desde el plano de la cinta al plano móvil de rejilla.
Una vez la capa completa es sostenida por el plano móvil, el cabezal es llevado por encima del palet, en donde la capa de objetos es descargada moviendo el plano móvil de rejilla otra vez de tal modo que se retire de su soporte de los objetos.
Una desventaja de este tipo de aparato es que el ciclo de transferencia requiere el movimiento del cabezal a lo largo del eje longitudinal del transportador y este hecho limita las posibilidades de la distribución en instalación de la instalación. De hecho si se utiliza un sistema de manipulación de dos ejes (horizontal - longitudinal y vertical) , la zona de depósito para la capa necesariamente debe estar situada en el mismo eje longitudinal que el transportador; para permitir la utilización de otras distribuciones en instalación, necesariamente deben ser utilizados sistemas de recolecta robóticos de cuatro ejes.
Adicionalmente, se pueden causar problemas relacionados con el bulto por el hecho de que el aparato requiere un espacio en la cabeza del extremo del transportador para recibir el cabezal después de que el cabezal haya cargado la capa de objetos.
Otra desventaja es que debido a la relativa pesadez del cabezal y a la conexión que se prolonga desde el cabezal hasta el robot, las traslaciones del cabezal inevitablemente están acompañadas por vibraciones significantes, hasta el punto de comprometer las operaciones de transferencia, especialmente cuando los objetos en cuestión son suficientemente inestables debido a su forma intrínseca. En tales casos será necesario hacer la estructura más rígida y compleja a fin de estabilizar la estructura, disuadiendo de este modo la utilización de un aparato diseñado de esa forma para transferir objetos.
Un objetivo de la invención es evitar esta desventaja por medio de un aparato y un procedimiento los cuales intrínsecamente dan lugar a movimientos seguros y estables.
En particular, un objetivo principal importante de la invención es permitir que sea utilizado cualquier tipo de sistema de transferencia de dos ejes (horizontal y vertical o giratorio y vertical) , sin dar lugar de ese modo a limitaciones en la distribución en instalación.
Los objetivos anteriormente mencionados y otros se alcanzan mediante la invención como se caracteriza en las reivindicaciones adjuntas.
La invención se divulga en la siguiente descripción detallada con la ayuda de las figuras adjuntas de los dibujos los
cuales ilustran una forma de realización preferida de la misma, proporcionada a título de ejemplo no limitativo, en las cuales:
la figura 1 es una vista en sección a lo largo de un plano vertical longitudinal del aparato de la invención;
la figura 2 es un detalle a mayor escala de la figura 1;
la figura 3 es una vista en instalación desde arriba de la figura 2;
las figuras 4A y 4B muestran el mismo detalle de la figura 2 en dos etapas diferentes de la transferencia del grupo de objetos al cabezal de manipulación;
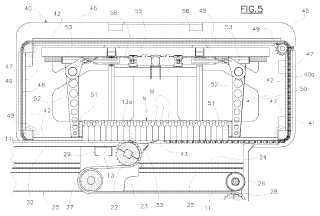
la figura 5 es un detalle a mayor escala de la figura 2;
la figura 5A es un detalle a mayor escala de la figura 5.
El aparato de la invención comprende una cinta transportadora de banda móvil unidireccional 10, que comprende una cinta transportadora flexible 11 la cual está sostenida por un bastidor de soporte 18, una rama superior de la cinta transportadora 11 la cual define la rama de transporte 12, que se mueve en una dirección horizontal; la rama de transporte 12 presenta una pista final 13 que está situada en el extremo de la rama 12 y define una superficie de apoyo capaz de sostener un grupo N de objetos.
En detalle, los objetos representados como un ejemplo en las figuras son botellas; la invención sin embargo puede concernir a la manipulación de numerosos otros tipos de objetos diferentes.
En particular, en la forma de realización representada en las figuras, otros medios de transporte 19 están dispuestos aguas arriba del transportador 10 los cuales son capaces de transferir una pluralidad de filas transversales de objetos M unas al lado de otras al extremo aguas arriba de la rama de transporte 12. Las filas son entonces transferidas a la cinta 11 y después del avance de la banda, encuentran unos primeros medios de tope 15 que temporalmente bloquean el grupo M y dan lugar, gracias al avance de la cinta 11 la cual continúa mientras los objetos M están detenidos, una estación de bloqueo F en donde los objetos M se acumulan hasta que se forma una capa N. Aguas abajo de la primera estación F, está instalada posiblemente (pero no necesariamente) una segunda estación G, la cual está formada por unos segundos medios de tope 16, en donde el grupo N espera temporalmente después de haber sido liberado por los medios de tope anteriores 15. A continuación el grupo N es transferido, por el avance de la cinta 11, a la pista final 13 de la rama de transporte, en donde está instalada la estación de transferencia T, la cual transfiere el grupo N de objetos a un cabezal de manipulación 40.
Por debajo de la rama de transporte 12 una base rígida larga 30 está instalada en contacto con la cinta superpuesta 11, reforzando de ese modo el plano de reposo entero definido por la cinta 11 para los objetos; la base 30 es telescópica a fin de seguir las variaciones en longitud de la rama 12, como se describe más completamente más adelante en este documento.
En particular, la base 30 comprende una parte aguas arriba fija 31 la cual implica a la pieza inicial de la rama 12 y a las estaciones F y G y una parte aguas abajo 32, la cual implica a la pista entera 13. Cada una de las dos partes 31 y 32 está formada por una pluralidad de varillas relativamente largas y paralelas delgadas (tubulares)... [Seguir leyendo]
Reivindicaciones:
1. Aparato para la manipulación de grupos de objetos en una instalación para la paletización de objetos que comprende:
una cinta transportadora (10) , de la cual una rama de transporte (12) presenta en el extremo aguas abajo de la misma una pista final (13) que define una superficie de apoyo para soportar un grupo (N) de objetos en una estación de transferencia (T) ;
un cabezal de manipulación (40) que presenta un plano de soporte flexible (41) , estando el plano de soporte (41) adaptado para deslizar horizontalmente a lo largo de unas guías de deslizamiento (42) , por debajo del grupo (N) de objetos en la estación de transferencia (T) hasta que forma una superficie de soporte para el grupo de objetos, estando el extremo delantero (43) del plano de soporte colocado de manera adyacente al extremo (13a) de la pista final (13) , caracterizado porque un extremo (13a) de la pista final (13) se puede desplazar en una dirección longitudinal entre una posición avanzada, en la cual la pista final (13) constituye una superficie de apoyo para el grupo (N) de objetos, y una posición retraída en la cual la pista final (13) no constituye una posición de apoyo para el grupo de objetos, estando el extremo (13a) adaptado para pasar de la posición avanzada a la posición retraída de forma contemporánea y sincronizada con el avance del plano de soporte (41) por debajo del grupo de objetos.
2. Aparato según la reivindicación 1, caracterizado porque un extremo aguas abajo de la rama de transporte (12) comprende un rodillo giratorio (22) para el enrollado de la cinta, estando el rodillo (22) soportado por un carro (23) , el cual es móvil en vaivén en un sentido de avance del transportador de cinta, estando el extremo (13a) de la pista final
(13) definido en el rodillo giratorio (22) .
3. Aparato según la reivindicación 2, caracterizado porque comprende un segundo rodillo giratorio (27) para el enrollado de la banda, estando el rodillo (27) soportado por el carro móvil (23) y un tercer rodillo giratorio (28) para el enrollado de la cinta y que presenta un eje fijo, estando la cinta (11) de la cinta transportadora (10) enrollada alrededor del primer rodillo (22) en un primer sentido de giro y a continuación, enrollada alrededor del segundo rodillo (27) en el sentido de giro opuesto al sentido de giro anterior y a continuación, enrollada alrededor del tercer rodillo (28) en el primer sentido de giro.
4. Aparato según la reivindicación 2, caracterizado porque comprende una parte aguas abajo (32) de una base rígida (30) , la cual se extiende a lo largo de toda la pista (13) por debajo de la cinta (11) , reforzando la superficie de apoyo que define la pista (13) , estando la parte (32) unida rígidamente al carro móvil (23) .
5. Procedimiento para la manipulación de grupos de objetos en una instalación para la paletización de objetos, presentando dicha instalación un equipo que comprende:
una cinta transportadora (10) , de la cual una rama de transporte (12) presenta en el extremo aguas abajo de la misma una pista final (13) que define una superficie de apoyo para soportar un grupo (N) de objetos en una estación de transferencia (T) ; pudiendo desplazarse el extremo (13a) de la pista final (13) en una dirección longitudinal, presentando un cabezal de manipulación (40) un plano de soporte flexible (41) , estando el plano de soporte (41) adaptado para deslizar horizontalmente a lo largo de unas guías de deslizamiento (42) , por debajo del grupo (N) de objetos en la estación de transferencia (T) hasta que forma una superficie de soporte para el grupo de objetos, comprendiendo el procedimiento las siguientes etapas:
llevar el cabezal de manipulación (40) por encima de la pista final (13) , estando el plano de soporte (41) colocado lateralmente con respecto al grupo de objetos;
hacer avanzar un grupo (N) de objetos en el transportador (10) hasta que alcance la pista final (13) ;
mover el extremo (13a) de la pista final (13) en una dirección longitudinal entre una posición avanzada, en la cual la pista final (13) define toda la superficie de apoyo para el grupo de objetos y una posición retraída, en la cual la superficie de apoyo desaparece;
mover el plano de soporte de forma contemporánea y sincronizada con el movimiento del extremo de la pista final
(13) hasta que el plano de soporte (41) es llevado por debajo de la capa de objetos, siendo colocado el extremo delantero (43) del plano de soporte (41) de manera adyacente a, y en el mismo plano horizontal que, el extremo (13a) de la pista final (13) durante dicho movimiento.
6. Procedimiento según la reivindicación 5, caracterizado porque el cabezal de manipulación (40) está estacionario durante el movimiento contemporáneo y sincronizado de los dos extremos (13a y 43) .
7. Procedimiento según la reivindicación 5, caracterizado porque el grupo de objetos se mantiene estacionario con respecto al cabezal de manipulación (40) durante el movimiento contemporáneo y sincronizado de los dos extremos (13a y 43) .
Patentes similares o relacionadas:
MÁQUINA PALETIZADORA DE ENVASES Y PROCEDIMIENTO DE UTILIZACIÓN DE LA MISMA, del 30 de Abril de 2020, de AND & OR RESEARCH, S.L.U: Máquina paletizadora de envases y su procedimiento de utilización para conseguir la máxima compactación de los envases en bateas. La máquina comprende un bastidor, en […]
Dispositivo y procedimiento para el paletizado de pilas, del 4 de Marzo de 2020, de WINDMOLLER & HOLSCHER KG: Dispositivo para el paletizado de pilas , en particular de sacos, productos semielaborados de sacos, secciones de tubos flexibles o sacos aplanados, que comprende las […]
Aparato mejorado para paletizar automáticamente recipientes y método respectivo, del 12 de Febrero de 2020, de UNITEC S.P.A: Aparato para cargar una pluralidad de recipientes , particularmente que contienen productos vegetales, sobre palés, que comprende: - un primer conjunto que consiste […]
Dispositivo de detección y método para un dispositivo de transferencia de capa, del 20 de Noviembre de 2019, de Gebo Packaging Solutions Italy SRL: Un método de transferencia para utilizar un dispositivo de transferencia que funciona como dispositivo de desmontaje de palé, a fin de transferir capas preformadas […]
Procedimiento para producir pilas de hojas, del 5 de Junio de 2019, de BW Papersystems Stuttgart GmbH: Procedimiento para producir pilas de hojas en el que está previsto que para salvar una separación vertical entre el nivel de suministro de las hojas […]
Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta, del 5 de Junio de 2019, de Gebo Packaging Solutions Italy SRL: Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta estandarizada, que comprende: - una columna de guiado […]
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
Dispositivo de alimentación para alimentar con sacos llenos un dispositivo de paletización, del 17 de Abril de 2019, de WINDMOLLER & HOLSCHER KG: Dispositivo de paletización para una pila de sacos llenos para formar una pila de sacos, que presenta un dispositivo de elevación , así como un dispositivo […]