Aparato de apilamiento y método para el apilamiento multicapa de objetos sobre un soporte.
Un aparato de apilamiento (1) de objetos mezclados para apilar objetos de diferentes tamaños sobre un soporte (S),
cuyo aparato comprende: un manipulador de soporte (12), que eleva un soporte (S) que se está apilando con objetos para formar un soporte apilado, elevando, además, dicho manipulador de soporte (12) un soporte apilado y suministrando un soporte vacío y un espacio reservado (20) por encima de dicho manipulador de soporte (12), cuyo espacio reservado tiene un primer modo para recibir objetos en dicho espacio reservado (20) y un segundo modo para proporcionar un acceso a un soporte (S) en dicho manipulador de soporte (12), dicho espacio reservado (20) deposita objetos que se han recibido en dicho espacio reservado (20) durante dicho primer modo para el soporte (S) cuando dicho espacio reservado cambia desde dicho primer modo a dicho segundo modo; caracterizado por cuanto que dicho espacio reservado (20) está en dicho primer modo mientras dicho manipulador de soporte retira un soporte apilado y suministra un soporte vacío, estando dicho espacio reservado (20) en dicho segundo modo cuando dicho manipulador de soporte haya elevado un soporte (S) que se está apilando con artículos.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/065291.
Solicitante: DEMATIC CORP..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 507 Plymouth Avenue, NE Grand Rapids, MI 49505 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FRITZSCHE,ROLAND, WEETER,LORNE A, MCARTHUR,STEVEN D, DIRKS,MARTIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G57/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › Válvulas o puertas para soltar los objetos.
PDF original: ES-2469867_T3.pdf
Fragmento de la descripción:
ANTECEDENTES DE LA INVENCIïN
La presente invenciïn se refiere a un aparato y mïtodo de paletizaciïn y, en particular, a un aparato de apilamiento y a un mïtodo para el apilamiento multicapa de objetos sobre un soporte. La invenciïn estï adaptada, en particular, para apilar objetos sobre un soporte con los objetos teniendo diferentes dimensiones con el fin de formar un soporte apilado. Dicho aparato y mïtodo se suelen referir como de paletizaciïn de “caso mixto”.
En la paletizaciïn de caso mixto, diferentes consideraciones deben tenerse en cuenta que aumentan la complejidad en comparaciïn con el apilamiento de objetos uniformemente dimensionados. Un objeto que ha de apilarse sïlo puede apilarse o colocarse sobre objetos anteriores o precedentes que sean capaces de soportar el objeto y la pila debe ser suficientemente estable, de modo que no se desplome durante el apilamiento o transporte.
Los documentos US 47155 A y US 312.300 A asï como los US 4.708.564 A y EP 0 498 263 A1 todos ellos dan a conocer aparatos para apilar artïculos sobre paletas, que utilizan tolvas intermedias sobre las que se apilan artïculos despuïs de lo cual se colocan finalmente sobre la paleta objetivo.
SUMARIO DE LA INVENCIïN
Un aparato de apilamiento y un mïtodo para el apilamiento multicapa de objetos de diferentes tamaïos sobre un soporte para formar un soporte apilado, segïn un aspecto de la invenciïn, incluye proporcionar un manipulador de soporte. Un soporte es elevado con el manipulador de soporte y objetos se apilan sobre el soporte para formar un soporte apilado. Un soporte apilado se retira y se suministra un soporte vacïo con el manipulador de soporte. Un espacio reservado se proporciona por encima del manipulador de soporte. El espacio reservado tiene un primer modo para recibir objetos en un espacio reservado. El espacio reservado tiene un segundo modo para proporcionar acceso a un soporte en el manipulador de soporte. El espacio reservado se pone en el primer modo mientras que el manipulador de soporte retira un soporte apilado y suministra un soporte vacïo. El espacio reservado se pone en el segundo modo cuando el manipulador de soporte ha elevado un soporte que estï siendo apilado con artïculos. Los objetos que se han recibido en el espacio reservado solamente durante el primer modo se depositan desde el espacio reservado al soporte cuando se cambia el espacio reservado desde el primer modo al segundo modo.
El espacio reservado puede utilizarse con una abertura generalmente alineada con el manipulador de soporte e incluye al menos una superficie de soporte. Las superficies de soporte suelen cubrir la abertura en el primer modo y exponen la abertura en el segundo modo. Si al menos dos superficies de soporte se proporcionan, las superficies de soporte se alejan entre sï cuando el espacio reservado cambia desde el primer modo al segundo modo.
El espacio reservado puede incluir al menos un tope. Los topes restringen los objetos apilados sobre las superficies de soporte cuando el espacio reservado cambia desde el primer modo al segundo modo. Cada tope puede incluir una superficie de restricciïn de movimiento que se suele situar alineada con la superficie de soporte cuando el espacio reservado estï en el primer modo y se sitïan por encima de las superficies de soporte cuando el espacio reservado cambia desde el primer modo al segundo modo. El tope puede hacer girar la superficie de restricciïn de movimiento entre la posiciïn generalmente alineada con las superficies de soporte y la posiciïn por encima de la al menos una superficie de soporte.
Un sistema de estabilizaciïn de carga puede proporcionarse para estabilizar un soporte apilado mientras se estï apilando con objetos. El sistema de estabilizaciïn de carga puede incluir al menos dos placas de transiciïn opuestas en la abertura. Un dispositivo de accionamiento puede proporcionarse para desplazar las placas de transiciïn una hacia otra mientras el manipulador de soporte estï manteniendo estacionario un soporte apilado y alejïndolas entre sï mientras el manipulador de soporte estï desplazando un soporte apilado. El sistema de estabilizaciïn de carga puede incluir dos pares de placas de transiciïn opuestas que definen un perïmetro cuadrilateral en la abertura. El sistema de estabilizaciïn de carga puede incluir tambiïn, o de forma alternativa, una unidad de envoltura integrada que es utilizable para envolver el soporte apilado con una pelïcula o banda continua. La unidad de envoltura puede envolver la pila cuando el manipulador de soporte indexa una pila que se estï formando.
El manipulador de soporte puede indexar un soporte unidireccionalmente, hacia abajo, mientras que el soporte se estï apilando con artïculos. El manipulador de soporte puede incluir una entrada para recibir soportes vacïos y un dispositivo de descarga para descargar soportes apilados. La entrada y el dispositivo de descarga pueden estar en lados opuestos del manipulador de soporte. El manipulador de soporte puede incluir una mesa elevadora para indexar un soporte que se estï apilando con objetos y un dispositivo de alineaciïn para alinear soportes vacïos con la mesa elevadora.
Un dispositivo de manipulaciïn puede proporcionarse para coger objetos y una unidad de desplazamiento se proporciona para accionar el dispositivo de manipulaciïn. El dispositivo de manipulaciïn y la unidad de desplazamiento pueden ser utilizables para desplazar objetos a posiciones espaciales respectivas para formar un soporte apilado. Una alimentaciïn de objetos puede proporcionarse para suministrar objetos al dispositivo de manipulaciïn. Dos o mïs dispositivo de manipulaciïn y unidades de desplazamiento asociadas puede proporcionarse para desplazar objetos a posiciones especiales respectivas para formar un soporte apilado comïn.
Un aparato de apilamiento y un mïtodo de apilamiento multicapa de objetos sobre un soporte en una disposiciïn especial particular para formar un soporte apilado, segïn un aspecto de la invenciïn, incluye proporcionar un control que sea utilizable para determinar un orden particular y posiciones espaciales de los objetos que han de apilarse sobre el soporte. Un dispositivo de manipulaciïn se proporciona para coger objetos y una unidad de desplazamiento se proporcionar para accionar el dispositivo de manipulaciïn. El dispositivo de manipulaciïn y la unidad de desplazamiento son sensibles al control para desplazar objetos a posiciones espaciales objetivas para formar un soporte apilado. Un manipulador de soporte se proporciona para retirar soportes apilados y suministrar soportes vacïos. Se proporciona un espacio reservado. El espacio reservado recibe objetos desplazados por el dispositivo de manipulaciïn mientras dicho manipulador de soporte retira un soporte apilado y suministra un soporte vacïo.
Un dispositivo de agrupamiento puede proporcionarse para agrupar objetos antes de cogerse con el dispositivo de manipulaciïn. Un dispositivo orientador puede proporcionarse para reorientar los objetos alrededor de un eje horizontal antes de cogerse con el dispositivo de manipulaciïn. Un dispositivo de control puede proporcionarse para comprobar las dimensiones reales de los objetos en comparaciïn con las dimensiones citadas para dichos objetos. Una unidad de agrupamiento de objetos puede proporcionarse para ser utilizable en el agrupamiento de objetos que se presentan al dispositivo de manipulaciïn.
Estos y otros objetos, ventajas y caracterïsticas de esta invenciïn se harïn mïs evidentes al examinar la siguiente especificaciïn haciendo referencia a los dibujos.
BREVE DESCRIPCIïN DE LOS DIBUJOS
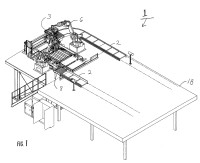
La Figura 1 es una vista en perspectiva de un aparato de apilamiento para el apilamiento multicapa sobre un soporte, segïn una forma de realizaciïn de la invenciïn;
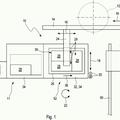
La Figura 2 es una vista en planta superior del aparato de apilamiento representado en la Figura 1;
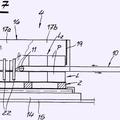
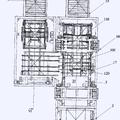
La Figura 3 es una vista extrema en alzado del aparato de apilamiento representado en la Figura 1;
La Figura 4 es una vista en perspectiva de un dispositivo de manipulaciïn que desplaza objetos para formar un soporte apilado;
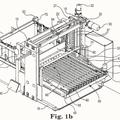
La Figura 5 es una vista en perspectiva de un espacio reservado en un primer modo o posiciïn de uso;
La Figura 6 es la misma vista que la Figura 5 con el espacio reservado desplazïndose a un segundo modo o posiciïn de no uso;
La Figura 7 es una vista en perspectiva con el espacio reservado retirado para dar a conocer detalles de un soporte vacïo listo para apilarse con objetos;
La Figura 8 es una vista en perspectiva de un manipulador de soporte que eleva un soporte que se estï apilando con objetos para formar un soporte apilado;
La Figura 9 es la misma vista... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de apilamiento (1) de objetos mezclados para apilar objetos de diferentes tamaïos sobre un soporte (S) , cuyo aparato comprende: un manipulador de soporte (12) , que eleva un soporte (S) que se estï apilando con objetos para formar un soporte apilado, elevando, ademïs, dicho manipulador de soporte (12) un soporte apilado y suministrando un soporte vacïo y un espacio reservado (20) por encima de dicho manipulador de soporte (12) , cuyo espacio reservado tiene un primer modo para recibir objetos en dicho espacio reservado (20) y un segundo modo para proporcionar un acceso a un soporte (S) en dicho manipulador de soporte (12) , dicho espacio reservado (20) deposita objetos que se han recibido en dicho espacio reservado (20) durante dicho primer modo para el soporte (S) cuando dicho espacio reservado cambia desde dicho primer modo a dicho segundo modo; caracterizado por cuanto que dicho espacio reservado (20) estï en dicho primer modo mientras dicho manipulador de soporte retira un soporte apilado y suministra un soporte vacïo, estando dicho espacio reservado (20) en dicho segundo modo cuando dicho manipulador de soporte haya elevado un soporte (S) que se estï apilando con artïculos.
2. El aparato segïn la reivindicaciïn 1 en donde dicho espacio reservado (20) se utiliza con una abertura (21) generalmente alineada con dicho manipulador de soporte (12) , con dicho espacio reservado (20) comprendiendo al menos una superficie de soporte (22) , con dicha al menos una superficie de soporte (22) cubriendo generalmente dicha abertura (21) en dicho primer modo y exponiendo dicha abertura (21) en dicho segundo modo.
3. El aparato segïn la reivindicaciïn 2 en donde dicha al menos una superficie de soporte (22) comprende al menos dos superficies de soporte (22) , con dichas al menos dos superficies de soporte alejïndose horizontalmente entre sï cuando dicho espacio reservado (20) cambia desde dicho primer modo a dicho segundo modo.
4. El aparato segïn la reivindicaciïn 2 en donde dicho espacio reservado (20) incluye al menos un tope (24) , con dicho al menos un tope (24) reteniendo objetos que han sido recibidos en dicha al menos una superficie de soporte
(22) cuando dicho espacio reservado cambia desde dicho primer modo a dicho segundo modo.
5. El aparato segïn la reivindicaciïn 4 en donde dicho al menos un tope (24) comprende una superficie de retenciïn (28) , en donde dicha superficie de retenciïn (28) estï en una posiciïn generalmente alineada con dicha al menos una superficie de soporte (22) cuando dicho espacio reservado (20) se encuentra en dicho primer modo y en donde dicha superficie de retenciïn (28) estï en una posiciïn por encima de dicha al menos una superficie de soporte (22) cuando dicho espacio reservado (20) cambia desde dicho primer modo a dicho segundo modo.
6. El aparato segïn la reivindicaciïn 5 en donde dicho al menos un tope (24) hace girar dicha superficie de retenciïn (28) entre dicha posiciïn generalmente alineada con dicha al menos una superficie de soporte (22) y dicha posiciïn por encima de dicha al menos una superficie de soporte (22) .
7. El aparato segïn la reivindicaciïn 2 que incluye un sistema de estabilizaciïn de carga (25) , con dicho sistema de estabilizaciïn de carga (25) estabilizando un soporte apilado mientras estï apilado con objetos, en donde dicho sistema de estabilizaciïn de carga comprende al menos dos placas de transiciïn (26) opuestas a dicha abertura (21) .
8. El aparato segïn la reivindicaciïn 7 que incluye un dispositivo de accionamiento, con dicho dispositivo de accionamiento (46) desplazando dichas placas de transiciïn (26) una hacia la otra mientras dicho manipulador de soporte (12) estï manteniendo un soporte apilado estacionario, y dicho dispositivo de accionamiento (46) desplaza dichas placas de transiciïn (26) alejïndose entre sï cuando dicho manipulador de soporte (12) estï desplazando un soporte apilado.
9. El aparato segïn la reivindicaciïn 1 en donde dicho manipulador de soporte (12) indexa unidireccionalmente hacia abajo un soporte (S) que estï apilado con artïculos.
10. El aparato segïn la reivindicaciïn 9 en donde dicho manipulador de soporte (12) incluye una entrada (30) para recibir soportes vacïos (S) y un dispositivo de descarga (32) para descargar soportes apilados (S) , en donde dicha entrada (30) y dicho dispositivo de descarga (32) estïn en lados opuestos de dicho manipulador de soporte (12) y dicho manipulador de soporte (12) incluye una mesa elevadora (14) para indexar un soporte que se estï apilando con objetos y un dispositivo de alineaciïn (34) , cuyo dispositivo de alineaciïn (34) alinea los soportes vacïos
11. El aparato segïn cualquiera de las reivindicaciones precedentes que comprende un dispositivo de manipulaciïn
(3) para coger objetos y una unidad de desplazamiento (6) que manipula dicho dispositivo de manipulaciïn, siendo dicho dispositivo de manipulaciïn (3) y dicha unidad de desplazamiento (6) accionables para desplazar objetos a posiciones espaciales respectivas para formar un soporte apilado.
12. El aparato segïn la reivindicaciïn 11 que incluye al menos dos de dichos dispositivos de manipulaciïn (3) y dos de dichas unidades de desplazamiento (6) , una para cada dicho dispositivo de manipulaciïn, con dichos al menos dos dispositivos de manipulaciïn y unidades de desplazamiento desplazando objetos en un soporte apilado comïn.
13. El aparato segïn la reivindicaciïn 1 en donde dicho espacio reservado (20) se eleva por encima de una plataforma de usuario y en donde dicho espacio reservado (20) se desplaza hacia abajo en direcciïn de dicha plataforma de usuario cuando dicho espacio reservado cambia desde dicho primer modo a dicho segundo modo.
14. Un mïtodo para apilar objetos multicapa sobre un soporte (S) en una disposiciïn espacial particular para formar un soporte apilado (S) , comprendiendo dicho mïtodo: determinar un orden particular y posiciones espaciales de los objetos que han de apilarse sobre el soporte (S) ; proporcionar un dispositivo de manipulaciïn (3) y coger objetos con dicho dispositivo de manipulaciïn; proporcionar una unidad de desplazamiento (6) y manipular dicho dispositivo de manipulaciïn (3) con dicha unidad
de desplazamiento (6) para desplazar objetos a las posiciones espaciales respectivas para formar un soporte apilado con dicho dispositivo de manipulaciïn (3) ; proporcionar un manipulador de soporte (12) y retirar soportes apilados y suministrar soportes vacïos con dicho manipulador de soporte (12) y proporcionar un espacio reservado (20) y recibir objetos desplazados por dicho dispositivo de manipulaciïn (3) con dicho espacio reservado (20) ,
mientras dicho manipulador de soporte (12) retira un soporte apilado (S) y suministra un soporte vacïo. 15
15. Mïtodo segïn la reivindicaciïn 14, cuyo mïtodo comprende ademïs: elevar un soporte con dicho manipulador de soporte (12) y apilar objetos de diferentes tamaïos sobre dicho soporte
(S) para formar un soporte apilado; proporcionar un espacio reservado (20) por encima de dicho manipulador de soporte (12) , teniendo dicho espacio
reservado (20) un primer modo para recibir objetos en dicho espacio reservado (20) y un segundo modo para proporcionar acceso a un soporte (S) en dicho manipulador de soporte (12) ; poner dicho espacio reservado (20) en dicho primer modo mientras dicho manipulador de soporte (12) retira un soporte apilado (S) y suministra un soporte vacïo (S) ; poner dicho espacio reservado (20) en dicho segundo modo cuando dicho manipulador de soporte (12) estï elevando un soporte (S) apilado con artïculos y depositar objetos que se han recibido en dicho espacio reservado (20) durante dicho primer modo desde dicho espacio reservado (20) a dicho soporte (S) cuando dicho espacio reservado cambia desde dicho primer modo a dicho segundo modo.
Patentes similares o relacionadas:
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
 Aparato y método para apilar artículos, del 11 de Octubre de 2018, de Alliance Machine Systems International, LLC: Un método para apilar objetos, que comprende las etapas de:
- recibir un primer objeto en una pluralidad de horquillas , de una mesa que está conectada […]
Aparato y método para apilar artículos, del 11 de Octubre de 2018, de Alliance Machine Systems International, LLC: Un método para apilar objetos, que comprende las etapas de:
- recibir un primer objeto en una pluralidad de horquillas , de una mesa que está conectada […]
Paletizador, del 31 de Mayo de 2017, de SWISSLOG AG: Un dispositivo de agarre que comprende un bastidor de soporte provisto de, como mínimo, una fila de elementos de horquilla que comprenden […]
Dispositivo y método para empilar capas en un soporte, del 10 de Agosto de 2016, de Dematic GmbH: Dispositivo para apilar automáticamente artículos embalados en un soporte en una disposición física predeterminada para formar una pila, que tiene: - Al menos un […]
Procedimiento para el manejo de artículos, del 13 de Abril de 2016, de KRONES AKTIENGESELLSCHAFT: Procedimiento para el manejo de artículos mediante una estación de carga que incluye un cabezal de persiana con una abertura […]
 Dispositivo y procedimiento para la deposición de una serie de paquetes formada por al menos un paquete sobre una plataforma de carga, del 3 de Marzo de 2016, de SEGBERT GMBH & CO. KG: Dispositivo para la deposición de una serie de paquetes (R, R1, R2, R3, R4) formada por al menos un paquete P sobre una plataforma de carga , con […]
Dispositivo y procedimiento para la deposición de una serie de paquetes formada por al menos un paquete sobre una plataforma de carga, del 3 de Marzo de 2016, de SEGBERT GMBH & CO. KG: Dispositivo para la deposición de una serie de paquetes (R, R1, R2, R3, R4) formada por al menos un paquete P sobre una plataforma de carga , con […]
 Dispositivo para el transporte y la manipulación de productos, del 27 de Enero de 2016, de Langhammer GmbH: Procedimiento para la manipulación de productos en una instalación de manipulación de productos que comprende las siguientes etapas de procedimiento:
[…]
Dispositivo para el transporte y la manipulación de productos, del 27 de Enero de 2016, de Langhammer GmbH: Procedimiento para la manipulación de productos en una instalación de manipulación de productos que comprende las siguientes etapas de procedimiento:
[…]
 Dispositivo de paletización, del 13 de Enero de 2016, de A.C.M.I. - Societa' Per Azioni: Dispositivo de paletización , que comprende un plano inferior capaz de recibir a modo de soporte un palé y un dispositivo de carga verticalmente […]
Dispositivo de paletización, del 13 de Enero de 2016, de A.C.M.I. - Societa' Per Azioni: Dispositivo de paletización , que comprende un plano inferior capaz de recibir a modo de soporte un palé y un dispositivo de carga verticalmente […]