Robot para la inspección de palas de aerogeneradores.
Robot para la inspección de palas de aerogeneradores.
La presente invención se refiere a un robot para la inspección de palas (2) de aerogeneradores sin contacto entre dicho robot y la pala (2),
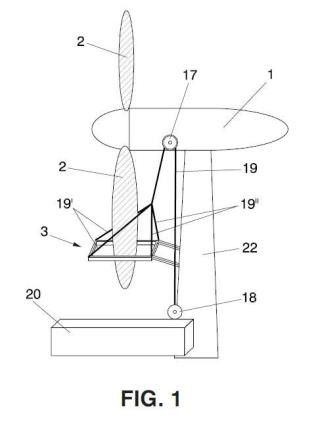
permitiendo así adaptarse a diferentes morfologías, que básicamente comprende: un dispositivo de inspección (3) sobre el que se montan las cámaras (7), unos raíles (30) sobre los que discurren sensores adicionales (13) de infrarrojos u otro tipo y sensores de posición y/o distancia (8), etc. para realizar la inspección y medios para adaptarse al perfil de dicha pala (2); un apoyo articulado motorizado (21) sobre el mástil (22) del aerogenerador que permite el centrado del dispositivo de inspección (3) respecto a la pala (2); y un vehículo auxiliar (20) situado al pie del mástil (22) del aerogenerador y que comprende al menos un motor de tracción (26) para enrollar o desenrollar un conjunto de cables (19) unidos al dispositivo de inspección (3) a través de juegos de poleas (17) (18).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331467.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: SALICHS SANCHEZ CABALLERO,MIGUEL ANGEL, BARBER CASTAÑO,Ramón Ignacio, MALFAZ VÁZQUEZ,María Ángeles.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayo de aparatos ópticos; Ensayo de aparatos y estructuras por métodos ópticos, no previstos en otro lugar.
Fragmento de la descripción:
Robot para la inspección de palas de aerogeneradores Objeto de la invención
Como el propio título indica, la presente invención tiene por objeto un robot para la inspección de palas de aerogeneradores en el que se utiliza una técnica no invasiva, es decir, en el que no existe contacto entre dicho robot y la pala.
Más concretamente, el robot de la invención se estructura de forma que, además de no entrar en contacto con la pala, permite la adecuación a diferentes morfologías, pudiendo por lo tanto ser utilizado en una amplia gama de palas, tanto del mismo como de distintos fabricantes.
Antecedentes de la invención
Actualmente es conocida la gran implantación y aceptación que ha tenido la energía eólica, lo que ha motivado la proliferación de aerogeneradores tanto dentro como fuera de nuestras fronteras.
Estos aerogeneradores están sometidos, como es lógico, a continuas tareas de mantenimiento y reparación, por lo que cada vez aparecen también más sistemas destinados a realizar dichas tareas en un corto espacio de tiempo y, por añadidura, de la forma más barata y eficaz posible, tanto desde el punto de vista de la reparación o inspección del propio aerogenerador, como desde el punto de vista de la generación de energía.
Uno de los elementos de los aerogeneradores habitualmente revisados y sometidos a operaciones de mantenimiento y/o reparación son las palas, elementos esenciales en el proceso de generación de la energía y especialmente sensibles, tanto por su estructura como por su vulnerabilidad y exposición al medio.
Así, también desde hace tiempo han aparecido también sistemas de inspección y/o reparación de las palas de muy diversa índole.
Inicialmente, algunos de estos sistemas se basaban en la construcción de plataformas elevadas que dieran acceso a las palas a un operario. Sin embargo dichos sistemas no resultaron, salvo para determinadas circunstancias, ser la mejor opción, tanto desde el punto de vista del costo, como del tiempo empleado y la excesiva mano de obra necesaria. Además, si bien para las operaciones de reparación "in situ" o de reemplazo sí podían ser adecuadas, no lo eran tanto para las meras operaciones de mantenimiento preventivo o inspección rutinaria en las que bastaba con observar el estado general de la pala.
Posteriormente aparecieron otros que, sin necesidad de una gran infraestructura, eran capaces de observar de forma minuciosa la superficie de la pala de forma automatizada y autónoma. Este tipo de sistemas, basados en la utilización de diversos tipos de robots, EP2466120, US8281442, WO2013/032166 o DE102008019680, recorren gracias a diversos sistemas la superficie de la pala obteniendo información y/o realizando operaciones de limpieza y mantenimiento. Sin embargo, todos ellos adolecen del problema que supone el hecho de contactar con la pala, que siendo un elemento extremadamente delicado puede ser dañado con facilidad incluso por el propio robot encargado de su supervisión.
Para solucionar esos problemas, existen algunos sistemas que intentan evitar el mencionado contacto, como es el que puede verse en el documento US2012/0003089, en donde en los extremos de unos brazos articulados se sitúan sendas pinzas o elementos de inspección que pueden acercarse todo lo que se quiera a las palas. Sin embargo, las pinzas o elementos de inspección se amoldan o siguen la forma de dicha pala con fin de poder acercarse al máximo, por lo que sólo serían útiles para un tamaño y un perfil de aspa determinada.
Con objeto de solventar ese mismo problema del contacto, existen también en el estado de la técnica sistemas que evitan dicho contacto con la pala, siendo mínimamente invasivos. Para ello realizan inspecciones remotas mediante sistemas embarcados en helicópteros, en pequeñas aeronaves teledirigidas o drones o bien utilizando dispositivos fijos en tierra o que, como mucho, trepan por el mástil del aerogenerador. Ejemplos de dichos sistemas pueden verse, por ejemplo, en US2012/0076345, US2011/0138937. Estos sistemas, sin embargo, a pesar de eliminar en gran medida el riesgo de dañar la pala, suelen tener inconvenientes asociados a la falta de precisión de las observaciones, precisamente por no poder acercarse a la pala o bien por estar en movimiento.
Por otro lado, el elevado número de perfiles de palas existentes en el mercado exige un tipo
de dispositivo o sistema de inspección que se adaptable a la mayoría de dichos perfiles, de forma que se puedan rentabilizar los equipos y, en definitiva, ahorrar costes, todo ello sin renunciar a la obtención de unos buenos resultados.
Descripción de la invención
El robot para la inspección de palas de aerogeneradores de la presente invención resuelve los problemas del estado de la técnica antes citado, pues es un sistema que, a la vez de realizar una inspección remota, es decir, sin tocar la pala, puede acercarse a la misma todo lo que se desee e independientemente de la forma o sección de dicha pala.
A su vez, se trata de un sistema sencillo, de fácil instalación y abierto a modificaciones en función del tipo de la inspección que se quiera realizar, por lo que constituye una eficaz y versátil herramienta para lograr una óptima inspección de multitud de modelos de palas de aerogeneradores.
Concretamente, el robot para la inspección de palas de aerogeneradores de la presente invención se estructura de forma que esencialmente comprende:
Un dispositivo de inspección cerrado que abraza o rodea la pala en la que se incorporan los sensores y actuadores necesarios para realizar la inspección y que cuenta con medios para adaptarse al perfil de dicha pala de forma que se puedan tomar datos convenientemente sin importar el perfil de la misma.
Un conjunto de cables, guía-cables y poleas para la ascensión y posicionamiento vertical del robot sobre el aerogenerador.
Un apoyo articulado motorizado sobre el mástil que permita al robot separarse del mismo la distancia adecuada de forma que el dispositivo de inspección se sitúe centrado respecto a la pala.
Un vehículo auxiliar situado al pie del mástil del aerogenerador y que comprende los motores para el desplazamiento vertical del dispositivo de inspección.
- Medios de control, tanto del dispositivo de inspección con sus correspondientes sensores, como del apoyo articulado, los cables y poleas y el vehículo auxiliar.
Una interfaz de usuario para el control del robot por parte del usuario.
Dicho lo anterior, de cara a realizar la inspección de una pala de un aerogenerador, previamente se situará un primer juego de poleas en la parte superior o góndola del aerogenerador, las cuales cooperarán con un segundo juego situado en el vehículo auxiliar posicionado a los pies del mismo, vehículo que como se ha dicho comprende también al menos un motor de tracción para el arrastre de los cables.
Dichos cables unirán el segundo juego de poleas situado inferiormente con el primer juego de poleas, situado superiormente en la góndola, desde donde dichos cables bajarán de nuevo hasta el dispositivo de inspección, al que se unirán de forma que se garantice la horizontalidad del mismo.
Controlado así el ascenso y descenso vertical del dispositivo de inspección, su separación del mástil será controlada por medio del apoyo articulado motorizado antes descrito, lo que garantizará tanto la separación correcta respecto al mástil como el centrado de dicho dispositivo de inspección que rodea a la pala, de forma que se evite el contacto con la misma.
Así pues, una vez instalado el vehículo auxiliar y el primer juego de poleas, se situará el dispositivo de inspección en la parte más baja del mástil de forma que pueda posicionarse la pala a inspeccionar en posición vertical, momento en el cual dicho dispositivo de inspección ya podrá situarse rodeando dicha pala para ir ascendiendo e inspeccionándola.
Una vez realizada la inspección, el dispositivo de inspección podrá volver a posicionarse inferiormente para que pueda accionarse el aerogenerador de forma que la siguiente pala a inspeccionar quede colocada en posición vertical, repitiendo la operación.
Descripción de las figuras
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
La figura 1.- Muestra una vista esquemática del robot de inspección de palas de la invención según una posible realización práctica.
...
Reivindicaciones:
1.- Robot para la inspección de palas de aerogeneradores caracterizado por que comprende:
- Un dispositivo de inspección (3) que rodea la pala (2) sin tocarla, que a su vez comprende los sensores necesarios para realizar la inspección y medios para adaptarse al perfil de dicha pala (2);
- Un apoyo articulado motorizado (21) sobre el mástil (22) del aerogenerador que permite que el dispositivo de inspección (3) se sitúe centrado respecto a la pala (2); y
- Un vehículo auxiliar (20) situado al pie del mástil (22) del aerogenerador y que comprende al menos un motor de tracción (26) para enrollar o desenrollar un conjunto de cables (19) unido al dispositivo de inspección (3) a través de juegos de poleas (17) (18).
2.- Robot para la inspección de palas de aerogeneradores según reivindicación 1, caracterizado por que el dispositivo de inspección (3) se estructura en forma de marco cuadrangular compuesto por un bloque fijo (4) y otro móvil (5) que constituyen sendos lados enfrentados unidos entre sí por barras (6) unidas solidariamente al bloque fijo (4) y de forma movible al bloque móvil (5), al que le sirven de guía en su desplazamiento, y por que al menos el bloque móvil comprende los sensores necesarios para realizar la inspección.
3.- Robot para la inspección de palas de aerogeneradores según reivindicación 2, caracterizado por que el bloque fijo (4) comprende los medios motrices que permiten el desplazamiento del boque móvil (5).
4.- Robot para la inspección de palas de aerogeneradores según reivindicación 3, caracterizado por que los medios motrices que permiten el desplazamiento del boque móvil (5) comprenden al menos un motor-reductor (9) que, a través de un medio de transmisión, transmite el movimiento a sendos husillos (11) solidarios al bloque móvil (5) de forma que éste pueda acercarse o alejarse respecto al bloque fijo (4) según interese en función de las características de la pala (2).
5.- Robot para la inspección de palas de aerogeneradores según reivindicación 1, caracterizado por que el apoyo articulado motorizado (21) comprende un cuerpo
principal (23) que cuenta, por uno de sus lados, con elementos de rodadura (24) destinados a facilitar su desplazamiento por el cuerpo del mástil (22), y por el otro de sus lados con barras fijas (28) que se unirán a través de respectivos motores (25) y de forma articulada al bloque fijo (4) del dispositivo de inspección (3).
6.- Robot para la inspección de palas de aerogeneradores según reivindicación 1, caracterizado por que comprende un primer juego de poleas (17) diseñado para ser situado en la góndola del aerogenerador, el cual cooperará con un segundo juego de poleas (18) situado en el vehículo auxiliar (20) a través del conjunto de cables (19) gobernado por el motor de tracción (26) montado en dicho vehículo auxiliar (20).
7.- Robot para la inspección de palas de aerogeneradores según reivindicaciones anteriores, caracterizado por que el conjunto de cables (19) une el primer juego de poleas (17) con el dispositivo de inspección (3) bifurcándose en dos parejas de cables (19, 19) que se unirán respectivamente a medios de enganche (12) con los que cuentan tanto el bloque fijo (4) como el móvil (5), controlando así su posición horizontal.
8.- Robot para la inspección de palas de aerogeneradores según reivindicaciones anteriores, caracterizado por que el dispositivo de inspección (3) comprende:
- medios de control y procesamiento embarcados (14) que se encargan de gobernar los diferentes sensores, el motor-reductor (9) encargado de posicionar correctamente el dispositivo de inspección (3);
- un módulo de comunicación inalámbrico (15) con el vehículo auxiliar (20) y/o un posible centro de control gobernado por el usuario; y
- un bloque de alimentación (16)
9.- Robot para la inspección de palas de aerogeneradores según reivindicaciones anteriores, caracterizado por que el vehículo auxiliar (20) comprende:
- medios de control y procesamiento complementarios (27) para el control del motor de tracción (26) y de los motores (25) que controlan la unión articulada del apoyo articulado motorizado (21) con el bloque fijo (4) del dispositivo de inspección (3);
- un módulo de comunicación inalámbrico (29) para comunicarse tanto con el dispositivo de inspección (3) como con un usuario de forma remota; y
- un bloque de alimentación (16).
Patentes similares o relacionadas:
Sistema de vigilancia de la degradación y del ensuciamiento de un espejo, del 13 de Mayo de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Sistema de vigilancia de un espejo , que consta de un cabezal de análisis que comprende un cabezal de emisión adaptado para emitir un […]
DISPOSITIVO, SISTEMA Y PROCEDIMIENTO DE CARACTERIZACION DE ELEMENTOS REFLECTORES A PARTIR DE LOS HACES DE LUZ REFLEJADOS, del 30 de Enero de 2020, de FUNDACION CENER-CIEMAT: Dispositivo, sistema y procedimiento de caracterización de elementos reflectores a partir de los haces de luz reflejados en los mismos y en concreto a partir de la calidad […]
Colector de prueba de conector de matriz para instrumentos de prueba ópticos asimétricos, del 4 de Septiembre de 2019, de FLUKE CORPORATION: Un sistema de colector de conectores de matriz para una prueba de red óptica de un enlace óptico multifibra que comprende múltiples rutas ópticas, que comprende: un […]
Dispositivo portátil para la medición sin contacto de objetos, del 20 de Mayo de 2019, de Aeroel S.r.l: Dispositivo portátil para la medición sin contacto de una magnitud, tal como el diámetro, de objetos alargados de pequeño y mediano tamaño, tal como alambres, barras o tubos, […]
Dispositivo y procedimiento para la supresión de reflexión en la medición de una variable de medición por medio de una fibra óptica, del 8 de Mayo de 2019, de BRD, vertr. d. den Bundesminister für Wirtschaft & Energie, dieser vertr. d. den Präsidenten der Bundesanst. f. Materialforsch: Procedimiento para la compensación activa de señales parásitas debido a la reflexión en la reflectometría de dominio de frecuencia óptica, que comprende: - facilitar […]
Sensor de humedad y procedimiento para la medición de humedad., del 1 de Mayo de 2019, de BAM BUNDESANSTALT FUR MATERIALFORSCHUNG UND -PRUFUNG: Procedimiento de medición de humedad para un sensor de fibra óptica 200, que comprende (a) proporcionar datos de medición de retrodispersión […]
 Método de identificación de señal para fibra óptica, del 13 de Marzo de 2019, de AFL Telecommunications LLC: Un método de identificar señales ópticas en una fibra óptica, insertándose la fibra óptica en una ranura de fibra y curvándose alrededor de una parte de curva para […]
Método de identificación de señal para fibra óptica, del 13 de Marzo de 2019, de AFL Telecommunications LLC: Un método de identificar señales ópticas en una fibra óptica, insertándose la fibra óptica en una ranura de fibra y curvándose alrededor de una parte de curva para […]
Aparato para monitorizar el rendimiento del proceso de un sistema de láser con un cable de fibra óptica de potencia, del 11 de Marzo de 2019, de OPTOSKAND AB: Aparato para monitorizar el rendimiento del proceso de un sistema de láser con un cable de fibra óptica de alta potencia, específicamente […]