Procedimiento y dispositivo para el aprendizaje y entrenamiento de operaciones de cirugía laparoscópica e intervenciones similares.
El procedimiento comprende realizar uno o más ejercicios sobre un modelo físico;
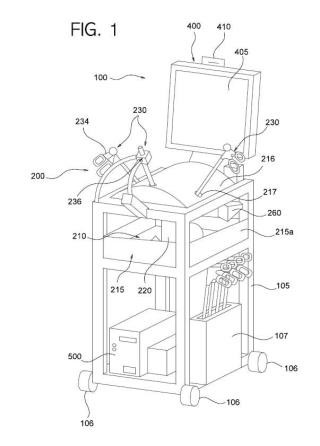
sensorizar y registrar los ejercicios; y analizarlos y evaluados por el usuario en base a pruebas de referencia previamente determinadas, cualitativa y cuantitativamente, y en tiempo real y/o a posteriori, automáticamente de manera autónoma por parte del usuario. El dispositivo (100) comprende un espacio de trabajo (210) adaptado para alojar el modelo físico (220), por lo menos un conjunto de herramienta (230) que puede operar en el espacio de trabajo (210), y medios para sensorizar y registrar los ejercicios que permiten determinar la posición y orientación del conjunto de herramienta (230), medios de grabación de vídeo y una unidad de control (500) para controlar la ejecución de los ejercicios.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331528.
Solicitante: FUNDACIÓ INSTITUT DE RECERCA DE L'HOSPITAL DE LA SANTA CREU I SANT PAU.
Nacionalidad solicitante: España.
Inventor/es: CASALS GELPI,ALICIA, HERNANSANZ PRATS,Albert, ROVIRA NEGRE,Ramón.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- G09B23/28 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 23/00 Modelos para usos científicos, médicos o matemáticos, p. ej. dispositivos a escala real para la demostración (bajo forma de juguetes A63H). › para la medicina.
Fragmento de la descripción:
Procedimiento y dispositivo para el aprendizaje y entrenamiento de operaciones de cirugía laparoscópica e intervenciones similares
CAMPO TÉCNICO
El procedimiento y el dispositivo que se describen a continuación pertenecen al campo de las técnicas de formación en cirugía laparoscópica e intervenciones similares, tales como intervenciones quirúrgicas mínimamente invasivas, por ejemplo artroscopia, etc. Se propone un procedimiento y un dispositivo destinados a la adquisición de habilidades quirúrgicas y evaluación en cirugía laparoscópica e intervenciones similares.
ESTADO DE LA TÉCNICA
Estudios realizados recientemente en Estados Unidos sobre la formación en cirugía laparoscópica han demostrado que solamente un 29 % del personal evaluado tiene una formación quirúrgica adecuada. Se ha comprobado también que en la formación se viene utilizando métodos de evaluación subjetivos para valorar las habilidades quirúrgicas. De acuerdo con los requerimientos actuales se considera que estos métodos son de poca validez y fiabilidad.
En los programas de formación en los cuales el volumen de intervenciones es bajo o existen pocos medios para un correcto aprendizaje de las técnicas de cirugía laparoscópica, un programa de ejercicios quirúrgicos en un laboratorio de laparoscopia, fuera del quirófano, puede resultar muy útil dado que permite mejorar la adquisición de las habilidades quirúrgicas asociadas, por ejemplo, en el abordaje laparoscópico. El entreno de cirujanos fuera del quirófano mediante simuladores permite minimizar accidentes y consecuentemente aumentar la seguridad del paciente, evitando errores, especialmente en el nivel basado en las habilidades (SBB) y en el nivel basado en las reglas (RBB).
En el campo de la aviación, por ejemplo, es conocido el uso de métodos de entrenamiento para los pilotos utilizando simuladores. Se ha comprobado que estos métodos son efectivos y han permitido reducir considerablemente el número de errores mortales en los citados niveles basados en las habilidades (SBB) y en las reglas (RBB). Sin embargo, en el campo
de la medicina, el número de errores en el entreno de cirujanos fuera del quirófano sigue siendo elevado, del orden de alrededor de un 3-4%. Sigue siendo necesario, por lo tanto, un mayor esfuerzo para mejorar la seguridad en el entreno de alumnos en este campo.
Se ha estimado que el coste dedicado en educar a un sólo cirujano, simplemente en tiempo añadido en el quirófano, es del orden de 50.000 dólares durante cinco años de residencia. Aunque el entreno de cirujanos fuera del quirófano mediante simuladores puede ser costoso, los costes totales asociados pueden ser menores respecto al entrenamiento tradicional en quirófano. Teniendo en cuenta que un cirujano júnior tarda más en las 10 intervenciones quirúrgicas que un cirujano sénior y que el porcentaje de complicaciones es mayor en cirujanos júniores, se ha estimado que el coste de esta diferencia de tiempo operatorio es del orden de 12.000 dólares por año y por residente entre los años 1993-1997. Por lo tanto, el coste del entrenamiento mediante un simulador debería compararse con el coste del mayor tiempo quirúrgico durante el entrenamiento quirúrgico tradicional.
Se ha demostrado también que un 10% de los alumnos que aprenden las habilidades quirúrgicas en cirugía laparoscópica tiene una habilidad innata para realizar maniobras complejas. Se ha demostrado también que un 80% de los alumnos tiene una curva de aprendizaje lenta pero mantenida para conseguir el nivel de experto. Finalmente, se ha 20 demostrado también que hasta un 10% de la población evaluada tiene una inhabilidad fundamental para trabajar en una imagen de vídeo de dos dimensiones. Las habilidades endoscópicas no se asocian a las habilidades en cirugía abierta ni con la experiencia en este abordaje quirúrgico. Las habilidades endoscópicas se asocian más a un factor neuromotor y espacial de la percepción. Aunque estas habilidades pueden aprenderse, el 25 aprendizaje se adquiere mejor en un ambiente fuera del quirófano utilizando, por ejemplo, simuladores y en particular simuladores tridimensionales.
En este sentido, se han venido desarrollando simuladores físicos para llevar a cabo la formación y el seguimiento de habilidades de un cirujano. Los simuladores físicos consisten 30 esencialmente en modelos, por ejemplo fabricados en plástico u otro material similar apropiado, que simulan la forma anatómica de órganos de un humano o un animal. Estos modelos físicos van incorporados en cajas de entrenamiento equipadas con útiles de intervención.
Un ejemplo de simulador físico para la formación y seguimiento de las habilidades de un cirujano se describe en el documento US20070166682. Se propone un dispositivo y un procedimiento para la simulación de intervenciones laparoscópicas en base a modelos físicos que permiten llevar a cabo una evaluación de la intervención que se está realizando en base distintos parámetros.
También, en US2010178644 se describe el entreno y aprendizaje de intervenciones endovasculares con modelos físicos a través de un dispositivo que permite analizar y evaluar al alumno utilizando medios hápticos que envían una señal al alumno que está aprendiendo con el dispositivo.
En US2006234195 se describe un simulador para intervenciones que incorpora una interfaz háptica. El simulador incorpora medios de detección y registro del movimiento (posición, orientación) de los útiles de intervención y permite calcular las características de los mismos.
Los documentos US2010216105, W02009000939, US2010167253, US2008020362 y US2006232664 describen simuladores quirúrgicos basados en modelos físicos. En algunos casos se trata de técnicas que hacen uso de sensores de fuerza y proporcionan realimentación ("feecteac/r") al alumno.
En US6267599 se propone un sistema físico para producir una simulación en tiempo real para el entreno de intervenciones mínimamente invasivas. El sistema descrito contempla el uso de realimentación de fuerzas ("forcé feedbacK') para instruir al operario a través de sensores e incorpora también un sistema informático asociado a un sistema de vídeo.
En la técnica anterior también se han desarrollado simuladores virtuales para llevar a cabo la formación y el seguimiento de habilidades de un cirujano. En este caso, se prescinde de modelos físicos y se utiliza una representación visual del órgano, a través de una interfaz gráfica, en combinación con bases de datos para la evaluación y entreno del alumno. Los simuladores virtuales hacen uso también de medios sensores y medios hápticos para informar al alumno acerca de diversas situaciones de la sesión. Un ejemplo de medios hápticos es la realimentación de fuerza que ofrece una sensación táctil realista. Los simuladores virtuales permiten entrenar de una manera rápida y segura al alumno para proporcionarse las diferentes habilidades requeridas para la realización de estos procedimientos de intervención. Unos medios de evaluación permiten valorar las
capacidades técnicas adquiridas por el alumno mediante observación directa y registro de vídeo para su posterior análisis. Como en el caso del sistema físico, se trata de un medio de formación que permite la adquisición de conocimientos y habilidades.
Por ejemplo, el documento US7850456 describe un dispositivo y un procedimiento para simular intervenciones laparoscópicas para educación y entreno utilizando órganos virtuales. En dicho documento se utilizan, además, útiles así como cámaras y sensores para detectar el movimiento y el recorrido de los útiles. Se prevén medios para proporcionar realimentación de fuerzas al alumno para el aprendizaje.
En otros documentos de la técnica anterior como US5882206, US6037927, US2010167248, US20100291520, US2004009459, US2010248200, WO9502233, W09628800,
W02009009820, US6538634 se contempla también el uso de medios hápticos en combinación con la simulación virtual para proporcionar realimentación de fuerza al alumno. Esto puede realizarse, por ejemplo, generando una fuerza de resistencia similar a la que ofrece un órgano.
Estas propuestas de la técnica anterior basadas en el uso de simuladores físicos o simuladores virtuales constituyen soluciones más o menos acertadas para la adquisición de habilidades quirúrgicas. Sin embargo, hasta ahora la técnica conocida ha permitido obtener información acerca de qué hace el alumno, usuario o cirujano, pero no ha logrado permitir obtener información precisa y fiable acerca de cómo lo hace.
Además, en los procedimientos de formación y evaluación de la técnica anterior la variable utilizada principalmente como evaluador objetivo del alumno...
Reivindicaciones:
1. Procedimiento de aprendizaje y entrenamiento para operaciones de cirugía laparoscópica e intervenciones similares, que comprende:
- realizar una o más pruebas relativas a operaciones de cirugía laparoscópica o intervenciones similares por parte de un usuario sobre un modelo físico de un órgano o útil;
- sensorizar y registrar las pruebas realizadas por el usuario; y
- analizar y evaluar las pruebas realizadas por el usuario en base a pruebas de
referencia previamente determinadas;
caracterizado por el hecho de que por lo menos la etapa de analizar y evaluar las pruebas realizadas por el usuario se realizan, cualitativa y cuantitativamente, y en tiempo real y/o a 15 posteriori, automáticamente de manera autónoma por parte del usuario.
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que comprende la etapa de visualizar las pruebas realizadas por el usuario.
3. Procedimiento según la reivindicación 1 o 2, caracterizado por el hecho de que
comprende realizar una o más pruebas preliminares sobre el modelo para comprobar que la posición de cada parte de las extremidades del usuario durante el proceso respeta las características de la ergonomía del usuario.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el
hecho de que comprende la realización de uno o varios ejercicios para comprobar en tiempo real habilidades del usuario con retorno háptico para el usuario informándole sobre la calidad del ejercicio que está realizando.
5. Procedimiento según la reivindicación 4, caracterizado por el hecho de que el retorno
háptico se realiza mediante señales seleccionadas de una o más de audio, vídeo, fuerza de frecuencia variable en función de la calidad de ejecución del ejercicio.
6. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que incluye la realización de una clase teórica de formación previa a través de material multimedia.
7. Procedimiento según la reivindicación 6, caracterizado por el hecho de que incluye la realización de una pluralidad de preguntas teóricas que debe responder interactivamente el usuario.
8. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que comprende la intervención de agentes perturbadores externos en la realización de alguna de las pruebas para simular una situación real.
9. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que la etapa de evaluar cualitativa y cuantitativamente las pruebas comprende adicionalmente proporcionar una valoración global final con información en forma numérica y/o gráfica incluyendo valores y/o estadísticas acerca de diferentes métricas de evaluación establecidas.
10. Procedimiento según la reivindicación 9, caracterizado por el hecho de que la etapa de evaluar las pruebas incluye, además, la emisión de una acreditación del usuario que ha realizado el procedimiento satisfactoriamente otorgándole las habilidades necesarias para realizar operaciones de cirugía laparoscópica e intervenciones similares.
11. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que la etapa de visualizar las pruebas realizadas por el usuario comprende visualizar adicionalmente dichas pruebas realizadas de manera ideal, de manera que se superponen imágenes correspondientes a una prueba que está realizando el usuario con imágenes correspondientes a una prueba ideal previamente realizada.
12. Dispositivo (100) de aprendizaje y entrenamiento para operaciones de cirugía laparoscópica e intervenciones similares, que comprende medios (200) para realizar una o más pruebas por parte de un usuario que comprenden un espacio de trabajo (210) adaptado para alojar un modelo físico (220) de un órgano o útil y por lo menos un conjunto de herramienta de cirugía (230) que puede operar en dicho espacio de trabajo (210), caracterizado por el hecho de que comprende, además, medios para sensorizar y registrar
las pruebas realizadas por el usuario, que comprenden medios para determinar la posición y orientación de dicho conjunto de herramienta de cirugía (230), medios de grabación de vídeo y una unidad de control (500) para controlar el proceso de ejecución de las pruebas realizadas por el usuario, adaptados para analizar y evaluar dichas pruebas cualitativa y 5 cuantitativamente, y en tiempo real y/o a posteriori, automáticamente de manera autónoma por parte del usuario.
13. Dispositivo (100) de aprendizaje y entrenamiento según la reivindicación 12, caracterizado por el hecho de que los medios de grabación comprenden una o más cámaras
subjetivas asociadas al alumno, y/o una o más cámaras objetivas (260) asociadas al modelo físico (220), y/o una o más cámaras (270) asociadas a la herramienta, y/o una o más cámaras (410) de análisis de la ergonomía y la posición del alumno.
14. Dispositivo (100) de aprendizaje y entrenamiento según la reivindicación 12 o 13, 15 caracterizado por el hecho de que el conjunto de herramienta de cirugía (230) comprende un
trocar (236) provisto de una zona de recepción (237) adaptada para la inserción de un útil laparoscópico (234), estando adaptado el trocar (236) para acoplarse en el dispositivo de manera que el útil laparoscópico (234) tiene acceso en el espacio de trabajo con capacidad de movimiento con cuatro grados de libertad.
15. Dispositivo (100) de aprendizaje y entrenamiento según cualquiera de las reivindicaciones 12 a 14, caracterizado por el hecho de que los medios para determinar la posición y la orientación de la herramienta (230) comprenden por lo menos un elemento sensor integrado en la herramienta de cirugía (230).
16. Dispositivo de aprendizaje y entrenamiento según la reivindicación 14 o 15, caracterizado por el hecho de que el conjunto de herramienta de cirugía (230) comprende medios hápticos para transmitir información háptica al usuario.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]