Dispositivo autónomo de visualización en vehículos móviles.
Dispositivo autónomo de visualización en vehículos móviles.
El dispositivo se constituye a partir de una base (19) con una turbina (1) protegida y parcialmente oculta por una tapa (15),
incorporando además un elemento de captación de imágenes (16), representado en esta implementación preferida por una cámara, formando todo ello un conjunto de reducidas dimensiones previsto para su aplicación y fijación sobre la superficie externa de un vehículo móvil, y más concretamente en una implementación preferida, en el fuselaje de un avión, de manera que el giro de la turbina (1) por el movimiento del vehículo (avión) lleva consigo la generación de energía electromagnética, la carga de la batería así como la alimentación eléctrica de sensores (9), generador de radiofrecuencia, y una electrónica de control para conseguir almacenar información y procesado de los sensores de imagen u otros sensores. El dispositivo es susceptible de incorporar un orificio (18) de evacuación del agua captada por la turbina y medios para la fijación (17) mediante remaches o tornillos del sistema a la superficie de la nave.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400152.
Solicitante: ADARVE LOZANO, Alberto.
Nacionalidad solicitante: España.
Inventor/es: ADARVE LOZANO,Alberto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D41/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › Instalaciones de potencia para servicios auxiliares.
- B64D47/08 B64D […] › B64D 47/00 Equipamiento no previsto en otro lugar. › Disposiciones de cámaras.
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un dispositivo de aplicación externa en vehículos móviles para obtener información visual u óptica del entorno o de alguna parte del mismo vehículo a partir de energía eléctrica obtenida a partir del flujo generado como consecuencia del movimiento del vehículo respecto del fluido circundante.
La principal característica del dispositivo es la no necesidad de conectarse al resto de equipo del vehículo ni para obtener energía ni para recopilar la información adquirida que será bien sea del propio vehículo, su entorno y su movimiento o del dispositivo en sí.
El dispositivo está previsto para su aplicación preferentemente en la parte externa del fuselaje de un avión si bien es susceptible de ser usado en otro tipo de nave terrestre, marítima o aérea.
ANTECEDENTES DE LA INVENCIÓN
En determinadas circunstancias como puede ser en aquellos casos cuando se dispone de una nave y se desea conocer información visual de los alrededores de la misma o de partes de estas por razones de operación o de análisis, es interesante poder disponer de un mecanismo que permita tomar y grabar imágenes desde un punto de la misma. Una propuesta preferida en este sentido consiste en colocar en los fuselajes o en la superficie exterior de la naves unos dispositivos dotados de una más cámaras junto con más de sensores auxiliares, que permitan a la nave obtener y grabar dicha información.
Un inconveniente importante a la hora de colocar una o más cámaras en el fuselaje de cualquier nave, aparte de las propias consideraciones aerodinámicas, es el cómo hacer llegar a dicho punto una fuente de energía que permita encenderlas así como la electrónica necesaria para la grabación y gestión de dichas imágenes.
Por otro lado, en cuanto a la iluminación nocturna para visión con el sensor de imagen, pueden citarse documentos correspondientes a patentes de invención, y entre ella las patentes con números US 7964847 B2 y US 20110266457 A1, ambas del mismo inventor, que se refieren a un sistema de iluminación adaptado para iluminar una operación de repostaje entre dos aviones, reivindicando el hecho de que el sistema de iluminación comprende un dispositivo de iluminación propiamente dicho incorporado al primer avión, un dispositivo de generación para generar la emisión de luz para ser vista por el operario del segundo avión, y un dispositivo de dirección para dirigir la misión de iluminación, complementándose con un dispositivo de ajuste para ajustar una anchura de la correspondiente envuelta de la misión definida por el dispositivo de dirección.
En el sistema de visión propuesto en esta patente, la energía es proporcionada por el propio movimiento de la nave, y se prevé la posibilidad de usar una iluminación adicional en el mismo o de usar sensores de imagen que amplifiquen la luz y no necesiten salvo una mínima porción de ésta, con lo que la propia luz nocturna sería suficiente para su correcto funcionamiento.
DESCRIPCIÓN DE LA INVENCIÓN
El dispositivo que se preconiza, está previsto para aplicarse externamente en un vehículo móvil, como podría ser un avión, que con su propio movimiento podría generar la energía necesaria para todos los elementos que lo componen. Esto incluiría encender una electrónica y una cámara que permitan ver y grabar las imágenes del entorno, además de alimentar a otros que se irán mencionando a lo largo de la presente descripción.
Concretamente, el dispositivo se constituye a partir de un cuerpo base fijado sobre el fuselaje del avión o de la nave, y sobre el cual va montada una turbina protegida y oculta en gran parte por una tapa, con objeto de proteger dicha turbina y elementos electrónicos de funcionamiento de distintos medios que se irán comentando, con esa especial particularidad de que la turbina referida, en el movimiento del avión, producirá energía y podrá ser utilizada para alimentar a la electrónica a que se hacía referencia con anterioridad, y a uno o más elementos de captación de imágenes junto con la electrónica necesaria para grabarlas y almacenarlas adecuadamente. El empleo de varios dispositivos permitirá obtener resultados
de imagen 3D y aspecto de los objetos circundantes a la nave portadora en base a cálculos geométricos.
La energía generada por la turbina además de alimentar a los sensores de Imagen establecidos externamente sobre la base, puede alimentar a uno o más sensores de los que se podrán obtener datos de la maniobra del avión o de la nave, así como de su entorno, permitiendo almacenar también esos datos en una memoria para su posterior descarga, de manera que su análisis permitirá obtener información relativa a las maniobras realizadas como son las de aproximación y alejamiento, incluyendo, sin ánimo de ser exhaustivo, altura, presión, temperatura, humedad, velocidad, orientación, aceleración, coordenadas gps, etc., e incluso el propio consumo del dispositivo o las propias revoluciones de su turbina. Los datos grabados podrán ser leídos con posterioridad mediante tecnología RFID o por luz, de nuevo sin necesidad de conectar físicamente el dispositivo a una fuente de alimentación externa. También, como es obvio pueden leerse mediante una conexión física si así se requiere.
En definitiva, se trata de un dispositivo que adquiere la energía necesaria para el funcionamiento de elementos de imagen y sensores referidos, a partir del movimiento una turbina o generador eólico de pequeño tamaño, colocado en la propia superficie.
Parte de esta energía se almacena en una batería o en supercondensadores para poder ser usada en instantes de no generación.
DESCRIPCIÓN DE LOS DIBUJOS
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, se acompaña la presente memoria descriptiva, formando parte integrante de la misma, una hoja única de planos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
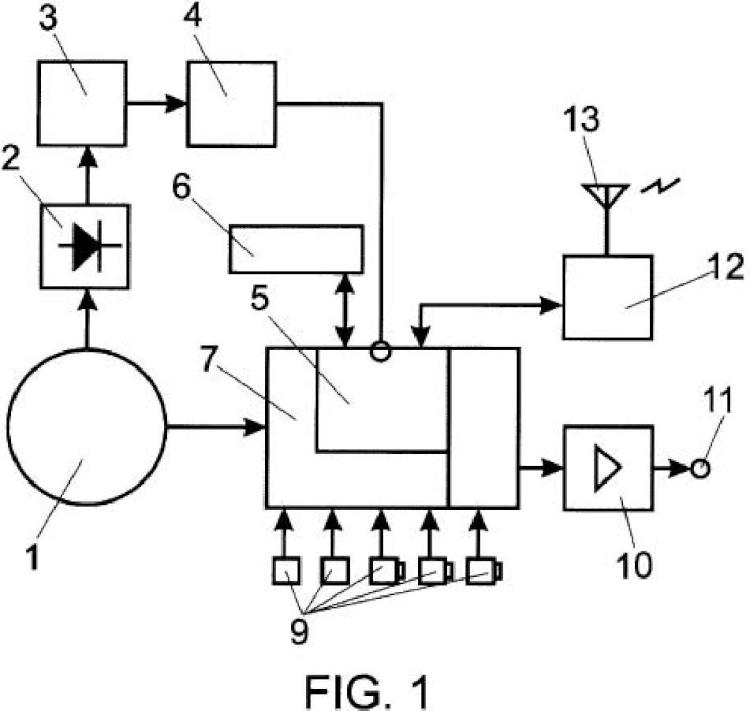
La figura 1.- Corresponde a un diagrama de bloques del dispositivo desde la turbina (1) de generación de energía eléctrica que es rectificada por un puente de diodos (2) y acondicionada (regulada) por un regulador (3) para poder cargar unas baterías o supercondensadores (4) que alimentarán al resto de los elementos, por la conexión (14), que así
lo requieran. Estos incluyen el micro-controlador (5) con su memoria (6) y sus elementos de lectura (7) de sensores (9) incluyendo los de imagen esenciales en esta patente y de emisión de información (8) a emisores (11) previo acondicionamiento/modulación y amplificación (10) de la señal a emitir. Así mismo el dispositivo comprende un elemento de intercomunicación (12) con una antena (13) para comunicaciones tipo RFID.
La figura 2.- Corresponde a una vista esquemática y frontal del dispositivo realizado de acuerdo con el objeto de la invención como implementación particular el mismo. Donde la turbina (1) se dispone sobre una base (19) con una tapa (15) y un sensor único de captación de imágenes (16), incluyendo un orificio (18) de desalojo del agua captada por la turbina y medios de fijación (17).
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
Como se puede ver en la figura comentada, el dispositivo de la invención se constituye a partir de una base (19) prevista para su fijación en la superficie externa de un vehículo móvil, concretamente en el fuselaje de un avión y puede fijarse a este mediante tornillos, remaches o cualquier otro medio de fijación (17) convencional.
Sobre dicha base (19) va montada una turbina (1) parcialmente oculta y protegida mediante una tapa (15), incorporando además un elemento de captación de imágenes (16) que permite la toma de imágenes del propio avión o de los alrededores de éste y su grabación en memoria interna que luego serán leídas tras aterrizar la nave. La disposición de la turbina (1) descrita, en el fuselaje de un avión, permite que con el movimiento de este, la misma gire, produciendo una generación de energía eléctrica capaz de alimentar todo el sistema, incluyendo la electrónica de amplificación (10) de alimentación, constituida por el puente de diodos (2) el regulador (3) y las baterías o super-condensadores (4), resto de sensores (9) generadores de luz o emisores (11), elementos de intercomunicación (12), y antena (13), y los elementos de control, tales como el micro-controlador (5), su memoria (6) y sus elementos de lectura (7) y de emisión de información (8), etc.
Por lo tanto, el dispositivo de la invención, además de la turbina (1) generadora de la energía eléctrica, puede incluir unos sensores entre...
Reivindicaciones:
1Dispositivo autónomo de visualización en vehículos móviles, caracterizado porque esta constituido a partir de un cuerpo dotado de medios de fijación al fuselaje o parte externa de una nave terrestre, marítima o aérea, en cuyo seno se establece una turbina (1) generadora de energía eléctrica asociada a un circuito de alimentación de un conjunto de sensores (9) de obtención de información del entorno, así como a un elemento de captación de imágenes (16), y resto de elementos eléctricos y electrónicos que participan en el dispositivo, contando con medios señalizadores y de generación de información de posición, así como la electrónica de control y medios de almacenamiento de los datos obtenidos.
2.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque incluye uno o más elementos de almacenaje de energía tales como baterías, supercondensadores (8), como elementos de alimentación auxiliar en los momentos en los que la turbina no gira con la suficiente velocidad.
3.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque incorpora medios de lectura inalámbricos de los datos almacenados en el mismo.
4.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque incorpora un puerto de lectura de los datos almacenados en el mismo.
5.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque el elemento de captación de imágenes incorpora medios para regular su enfoque y encuadre.
6.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque incluye un elemento electrónico interno tipo RFID de comunicación con el exterior.
7 - Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque incluye un elemento electrónico interno formado por un par luminoso electro voltaico.
8.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque incluye medios generadores de luz (11).
9 - Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de altura.
10.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de presión.
11.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de temperatura.
12.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de humedad.
13.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de velocidad en cualquiera de los ejes de la nave.
14.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de orientación.
15.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de aceleración en cualquiera de los ejes de la nave.
16.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de coordenadas gps de la nave.
17.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1, caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de consumo del propio dispositivo.
18.- Dispositivo autónomo de visualización en vehículos móviles, según reivindicación 1,
caracterizado porque entre los sensores (9) cuyos datos se almacenan en memoria, se establece al menos un sensor de revoluciones de la turbina (1).
g
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
DISPOSICIÓN DE MANDO, del 30 de Junio de 2020, de SEAT, S.A.: Una disposición de mando de un vehículo autónomo que modifica o ajusta una funcionalidad de conducción de un modo de conducción autónomo del […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, del 17 de Junio de 2020, de THALES: Un procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, el procedimiento comprende las siguientes etapas: - a) el suministro […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
UNIDAD CENTRAL DE VEHÍCULO, del 2 de Junio de 2020, de SEAT, S.A.: Una unidad central de un vehículo comprende un procesador y un cámara de adquisición de imágenes , donde las imágenes adquiridas […]
Método para controlar el tiempo de llegada de una aeronave, del 27 de Mayo de 2020, de THE BOEING COMPANY: Un método para controlar la llegada de una aeronave a un punto de referencia objetivo, comprendiendo (a) definir un tiempo requerido de llegada (RTA) en ese punto de referencia […]