Sistema de ayuda anticolisión para buques (SAAB).
Sistema de ayuda anticolisión para buques.
Se trata de un sistema de apoyo al oficial de guardia de los buques,
para la toma de decisiones sobre la maniobra correcta a realizar en caso de riesgo de colisión con otros buques.
La invención consta de los siguientes módulos: calculador de posiciones futuras, calculador curva de evolución, base de datos curvas de evolución, generador siluetas del buque, AIS modificado, de trasformación de la información recibida de los otros buques para poder presentarla en pantalla y de presentación en pantalla.
El sistema es de aplicación en todos aquellos buques que por normativa internacional deben tener instalado un sistema AIS.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200407.
Solicitante: UNIVERSIDAD DE CADIZ.
Nacionalidad solicitante: España.
Inventor/es: RASERO BALÓN,Juan Carlos, ENDRINA SANCHEZ,Maria De Las Nieves.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G3/02 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 3/00 Sistemas de control del tráfico para los vehículos marinos (marcado de las rutas de navegación B63B 51/00). › Sistemas anticolisión.
Fragmento de la descripción:
SECTOR DE LA TÉCNICA
Navegación Marítima. Sector naval. Electrónica naval. Equipos de navegación.
ESTADO DE LA TÉCNICA
Desde que existen los vehículos tripulados, existe un nuevo tipo de accidentes, y muchos han sido los esfuerzos realizados para que estos no se produzcan. En el sector de la navegación marítima, los esfuerzos se han dirigido a disminuir las colisiones entre buques, para lo cual se ha trabajado desde distintos frentes:
-Factor humano. El sesenta por ciento de los accidentes en el mar son colisiones, y gran parte de ellas se deben a errores humanos (Zhao J, W F. (1994) . The principies of Collision Prevention at Sea. Dalian Maritime University Press) . En este sentido la Organización Marítima Internacional (OMI) ha establecido un convenio de formación (IMO. (1978/95) . Standard of trainig, certification & watchkeepping) que estipula cual debe ser la preparación de los marinos. A pesar de que esta preparación es cada vez superior, el factor humano sigue produciendo accidentes, derivados principalmente de la fatiga a bordo (Smith, A. (2007) . Adecuate crewing and seaferdr's fatigue: the internacional perspective. (C. f. University, Ed.) , debida a la reducción del número de miembros de las tripulaciones y la existencia de buques más rápidos que reducen notablemente los tiempos de reacción ante colisiones.
-Reglamentación. Desde 1972 (/MO. (2003) . Convention on the lnternational regulations for preventing collisions at sea, 1972 (COLREG 1972) consolidated edition 2003. London: IMO)
existe el Reglamento internacional para prevenir los abordajes (RIPA) , que desde su implantación ha sufrido posteriores modificaciones. Este reglamento es de obligado cumplimiento para la maniobra entre dos o varios buques. Normalmente las colisiones se producen por incumplimiento del reglamento.
- Evolución de los buques (Bastida Tirado, J. (1996) . Evolución tecnológica de los buques
mercantes. La Laguna: Universidad de la Laguna}. En las últimas décadas los buques han
evolucionado notablemente. La técnica proporciona buques más seguros tanto en el aspecto
estructural, de propulsión o medioambiental. Sin embargo, un aumento de la densidad de
S tráfico, junto con mayores velocidades, hace que las probabilidades de colisión sean
mayores.
- Equipos de navegación para impedir la colisión entre buques. Probablemente sea el
aspecto que mayor evolución ha experimentado. Inicialmente los buques navegaban a la
10 vista para impedir las colisiones. En la segunda guerra mundial, la aparición del RADAR
(Ricard Rodríguez Martos Dauer, R. J. (1996) . Manual del Observador Radar. España:
Ediciones de la UPC S.L.} supuso un gran avance en este campo. Posteriormente el ARPA
(Atan Bofe, B. D. (2005) . Radar and ARPA manual (Second edition ed.) . Oxford: ELSEVIER},
con su sistema automático de ploteo ha permitido dos datos esenciales para evitar colisiones
15 como son: la distancia mínima a la que va a pasar un buque de otro (DCPA} y el tiempo que
resta para que esto ocurra (TCPA}. A este avance se ha sumado en los ARPAs el sistema
Trial Manouvring (Atan Bofe, B. D. (2005) . Radar and ARPA manual (Second edition ed.) .
Oxford: ELSEVIER}, que permite conocer que maniobra evasiva se debe realizar ante
buques que pueden llegar a crear un conflicto. También ha supuesto un gran avance en este
20 campo el empleo de Sistemas satelitarios Globales de Navegación (Kaplan, E. D. (1996) .
Understanding GPS: principies and applications. Artech House}, los cuales permiten conocer
con exactitud la situación del buque, así como su rumbo y velocidad efectiva. Otro de los
grandes avances de los equipos de navegación ha sido el ECDIS Sistema de Información y
Presentación de la Carta Electrónica (Weintri, A. (2009) . The electronic chart display and
25 information system (ECO/S) . Abingdon, United Kindom: Tay/or & Francis Customer Service}.
Este sistema permite integrar en una carta electrónica (CE} la información recibida de otros
equipos como el ARPA, GPS, etc., dando al oficial encargado de la guardia una información,
en una sola pantalla, del escenario por donde está navegando el buque. La última
innovación técnica aparecida ha sido el AIS Sistema de información Automática (Abbas
30 Harati-Mokhtari, A. W. (2007) . Automatic identification system (A/S) : data reliability and
human error implications. Journal of Navigation (60) , 373-389} el cual permite mediante
frecuencia VHF la trasmisión automática de datos entre buques, pudiendo conocer cada
buque en conflicto de forma instantánea cual es el rumbo, velocidad y velocidad de caída de
otros buques. Todos estos elementos están conectados entre si constituyendo lo que se
denominan Sistemas Integrados de Navegación. Como puede observarse el avance de la técnica en equipos de navegación ha sido excelente en un período de tiempo relativamente corto. Sin embargo, las colisiones entre buques siguen produciéndose.
5. En el campo de los sistemas anti colisión podemos establecer dos grupos: 1. Sistemas obligatorios en los buques actualmente. Consisten en sistemas proporcionan información y alarmas, pero en los que la decisión de actuar recae sobre el oficial de guardia. Esta categoría comprende los anteriormente mencionados ARPA y AIS, que proporcionan datos de DCPA y TCPA, e informan mediante señales acústicas y visuales de aquellos O blancos considerados peligrosos. La información se produce en tiempo real en el Al S y casi tiempo real en el ARPA, quien además cuenta con el Trial Manouvring como herramienta para producir maniobras evasivas, proporcionando una maniobra correcta siempre que los demás blancos no alteren su rumbo y/o velocidad. 2. Sistemas anticolisión automáticos. Son sistemas que en la actualidad no se encuentran implantados en los buques y en los que la decisión de actuación no recae sobre el oficial de guardia, sino que son los propios sistemas los que determinan la maniobra correcta. Existen múltiples investigaciones en este sentido que podemos dividir en tres áreas (Zhao Jingsong, W. P. (2008) . Automatic Collision Avoidance System: Towards 21st Centur y . 10. Sauthamptom) :
• Método de parámetros constantes (P., G. The exploration of ship's co/lison avoidance method. Shipping Quarterly, 23 (3) )
• Consideración del DCPA y TCPA (a/, C. B. (1983) . Manoeuvring times, domains and areas. Journal of Navigation , 36 (2) , 324)
• Análisis sintético del DCPA y TCPA (J, Z. (1989) . Modelíng the ship's risk of 2 S collision using the expansiona/ set theor y . Proc. of Academic symposium between Chinese and Japan lnstitutes of Navigation. Tokyo) Los nuevos métodos de investigación se están basando en configuración fuzzy (F, Z. J. (1991) . Simu/ation Model of DCPA decision making. Proc. of the 8th lA/N Congress. Cairo) , teoría de catástrofes, sistemas expertos (a/, C. e. (1991) . A KBS for marine collision avoidance. The world Congress on Expert System Proceeding, (pág. 2574) ) , redes neuronales, y sistemas de razonamiento basados en hipótesis.
Llegados a este punto el estado de la técnica resumirlos en dos grandes grupos: en relación a las invenciones podemos
S 10 1. Invenciones que incorporan equipamiento que habitualmente no se utiliza en los buques (es decir diferentes de Radar, ARPA, AIS o ECDIS) . En esta categoría podemos encontrar: a. Sistemas que utilizan, además de equipos habituales, telémetros laser. (ES 2 337 003 A1) , (JP2009230190) , KR20090069711 (A) ) b. Sistemas que utilizan cámaras visuales y tratamiento de imágenes. (ES-2306271_T3) , (GB2281000 (A) ) , c. Sistemas que crean una red wireless de trasmisión de datos. (JP10267686 (A) ) .
15 2.Invenciones que incorporan dispositivos que actúan automáticamente o semi automáticamente sobre componentes conocidos del buque (tales como velocidad o timón, o predicen futuras posiciones) para impedir la colisión. (ES 2 337 003 A1) , (JP9287976 (A) ) , (JP11125675 (A) ) , RU2383463 (C1) , ES 2176 984 T3, JP 20110084870
Ambos grupos, independientemente de buques, por los siguientes motivos: su eficacia, no eliminan del todo la colisión entre
20 1. No son sistemas universales. Su puesta en funcionamiento requeriría implantar un nuevo sistema en todos los buques.
25 2. No presuponen una ayuda a la toma de decisiones en el momento crítico de efectuar la maniobra correcta para evitar la colisión. Momento crítico, que salvo en casos de fuerza mayor, es cuando un error en la maniobra a realizar produce la colisión.
30 3.Las invenciones que proponen...
Reivindicaciones:
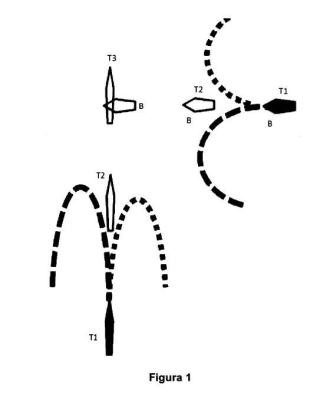
. Sistema de ayuda anticolisión para buques, caracterizado porque gestiona las señales correspondientes a los datos que permiten calcular las trayectorias futuras del buque y las curvas de evolución a ambas bandas del buque, y que comprende: a) Un módulo generador de la silueta horizontal del buque, que contiene las dimensiones del buque, la escala y las formas del buque. b) Un módulo para el cálculo dinámico de posiciones futuras del buque a partir de los datos de situación, velocidad efectiva, rumbo efectivo y tiempo
del GPS, rumbo verdadero, velocidad verdadera, y la silueta horizontal del buque. c) Una base de datos que almacena curvas de evolución del buque para diferentes velocidades, condiciones de mar y viento y diferentes condiciones de carga. d) Un módulo para la generación de la curva de evolución, basada en algoritmo de cálculo o mediante su selección de la base de datos de curvas de evolución. e) Un sistema de información automática (AIS) modificado, con capacidad para el tratamiento de los mensajes generados por el módulo de cálculo de posiciones futuras del buque y el generador de curva de evolución, así como para su transmisión a otros buques y recepción de la información generada en esos mismos módulos de otros buques.f) Un módulo de representación gráfica de la información del propio buque y de los otros, a partir de los mensajes generados por el módulo para el cálculo dinámico de posiciones futuras y el generador de curvas de evolución del propio buque, así como los recibidos a través del sistema de información automática modificado del propio buque y de otros buques que incorporen este mismo sistema de información automática modificado, que genera una alarma visual y acústica cuando:
o Exista intersección entre las curvas de evolución, babor con babor o estribor y estribor con estribor o babor, o las cuatro a la vez, de ambos buques, recomendando en este caso gráficamente de forma visual la maniobra correcta según el Reglamento internacional para prevenir los abordajes (RIPA) o en caso de esta producir colisión, recomendando la maniobra de evasión que impida la colisión.
2. Sistema de ayuda anticolisión para buques, según reivindicación 1, caracterizado porque el módulo para el cálculo dinámico de posiciones futuras genera un mensaje saliente que comprende: intervalo de tiempo entre posiciones futuras, posiciones futuras en latitud y longitud, posición de la silueta horizontal del buque ajustada a la situación de la antena del GPS del buque.
3. Sistema de ayuda anticolisión para buques, según reivindicación 1, caracterizado porque el módulo para la generación de la curva de evolución genera un mensaje saliente que consiste en dos curvas de evolución, babor y estribor todo a la banda, para el instante (velocidad y rumbo) y las condiciones meteorológicas compuestas por puntos de longitud y latitud referenciados a la situación de la antena GPS a diferentes tiempos.
4. Sistema de ayuda anticolisión para buques, según reivindicación 1, caracterizado porque la base de datos de curvas de evolución contiene para cada curva, puntos x e y referenciados en diferentes tiempos a diferentes velocidades de máquina y condiciones de carga.
5. Sistema de ayuda anticolisión para buques, según reivindicación 1 y 4, caracterizado porque la base de datos de curvas de evolución contiene para cada condición dos curvas de evolución, a babor y a estribor, con todo el timón a una banda.
6. Sistema de ayuda anticolisión para buques, según reivindicaciones anteriores, caracterizado porque los módulos que lo componen emplean al menos los siguientes elementos adicionales:
• Un giróscopo para conocer el rumbo verdadero del buque.
• Una corredera doppler suplementaria para conocer la velocidad del buque.
• Un GPS para conocer la velocidad efectiva, el rumbo efectivo del buque y la hora universal.
• Un anemómetro con calculador de la dirección y velocidad del viento real.
• Un calculador de altura de ola y dirección de la mar.
• Un sistema opcional de presentación, consistente en una cualquiera de entre las pantallas RADAR, ARPA, AIS y ECDIS.
Patentes similares o relacionadas:
Método para determinar la temporización de la recepción de un mensaje de radio, del 13 de Marzo de 2019, de True Heading AB: Método para determinar el tiempo de recepción por un receptor de radio de un mensaje AIS (Sistema de Identificación Automático) […]
 Sistema y método para decodificar señales de un sistema de identificación automática, del 12 de Febrero de 2014, de COM DEV INTERNATIONAL LIMITED: Un método para producir segmentos de mensaje de Sistema de Identificación Automática (AIS)decodificados validados a partir de […]
Sistema y método para decodificar señales de un sistema de identificación automática, del 12 de Febrero de 2014, de COM DEV INTERNATIONAL LIMITED: Un método para producir segmentos de mensaje de Sistema de Identificación Automática (AIS)decodificados validados a partir de […]
 Dispositivo para controlar la seguridad, del 5 de Marzo de 2013, de MACTAGGART SCOTT (HOLDINGS) LTD.: Un método de producir una salida que corresponde con la habilidad parallevar a cabo una operación dentro de un límite de seguridad en un buque […]
Dispositivo para controlar la seguridad, del 5 de Marzo de 2013, de MACTAGGART SCOTT (HOLDINGS) LTD.: Un método de producir una salida que corresponde con la habilidad parallevar a cabo una operación dentro de un límite de seguridad en un buque […]
 SISTEMA Y MÉTODO PARA LA IDENTIFICACIÓN DE MANIOBRAS PARA UN VEHÍCULO EN SITUACIONES DE CONFLICTO, del 6 de Junio de 2011, de COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Un método de identificación de maniobras para un vehículo en situaciones de conflicto entre el vehículo y por lo menos otro objeto , el método comprende: […]
SISTEMA Y MÉTODO PARA LA IDENTIFICACIÓN DE MANIOBRAS PARA UN VEHÍCULO EN SITUACIONES DE CONFLICTO, del 6 de Junio de 2011, de COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION: Un método de identificación de maniobras para un vehículo en situaciones de conflicto entre el vehículo y por lo menos otro objeto , el método comprende: […]
SISTEMA QUE INDICA UNA POSICION., del 16 de Enero de 1998, de GP & C SYSTEMS INTERNATIONAL AB: UNA PLURALIDAD DE OBJETOS MOVILES COMO AVIONES SON PROVISTOS CON RECEPTORES GPS, HABILITANDO LA DETERMINACION DE LONGITUD Y LATITUD. ADEMAS, EL RECEPTOR TAMBIEN DARA UN TIEMPO […]
PROCESO DE CODIFICACION PARA SISTEMA ANTICOLISION PARA LA NAVEGACION MARITIMA., del 1 de Enero de 1997, de THOMSON-CSF: EL SISTEMA DE LA INVENCION COMPRENDE, PARA CADA BARCO EQUIPADO, UN EMISOR QUE EMITE DE MANERA REPETITIVA LAS COORDENADAS GEOGRAFICAS, LA VELOCIDAD […]
 SISTEMA DE INFORMACION DE ATRAQUE PARA EMBARCACIONES, del 16 de Abril de 2008, de RAYTHEON COMPANY: Sistema para proporcionar información de navegación a un operador de un barco, comprendiendo el sistema: un sistema de radar acoplado al barco ; […]
SISTEMA DE INFORMACION DE ATRAQUE PARA EMBARCACIONES, del 16 de Abril de 2008, de RAYTHEON COMPANY: Sistema para proporcionar información de navegación a un operador de un barco, comprendiendo el sistema: un sistema de radar acoplado al barco ; […]