Procedimiento para monitorizar un espacio aéreo en torno a una aeronave.
Procedimiento para la monitorización de un espacio aéreo en torno a una aeronave (2),
la cual está equipada con varios módulos de imagen (6a-6h) con, respectivamente, al menos una óptica de representación (10) y un sensor de imagen (12), en el que los sensores de imagen (12) captan, respectivamente, una imagen parcial del entorno y unos medios de tratamiento de imagen (16) que empleando las imágenes parciales examinan el entorno en busca de otros objetos volantes 34 representados, caracterizado por que cada módulo de imagen (6a-6h) comprende unos medios de tratamiento de imagen propios que realizan el reconocimiento del objeto volante en base a las imágenes parciales captadas por el módulo de imagen (6a-6h) y emiten un resultado de reconocimiento, y el espacio aéreo es monitorizado empleando los resultados de reconocimiento de los módulos de imagen (6a-6h) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12002568.
Solicitante: DIEHL BGT DEFENCE GMBH & CO.KG.
Nacionalidad solicitante: Alemania.
Dirección: Alte Nussdorfer Strasse 13 88662 Überlingen ALEMANIA.
Inventor/es: KOCH,RENÉ DR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G5/00 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › Sistemas del control del tráfico aéreo.
PDF original: ES-2462980_T3.pdf
Fragmento de la descripción:
Procedimiento para monitorizar un espacio aéreo en torno a una aeronave.
La invención se refiere a un procedimiento para monitorizar un espacio aéreo en torno a una aeronave, la cual está equipada con varios módulos de imagen con, respectivamente, al menos una óptica de representación y un sensor de imagen, en el que los sensores de imagen captan, respectivamente, una imagen parcial del entorno y unos medios de tratamiento de imagen que utilizando las imágenes parciales examinan el entorno en busca de otros objetos volantes representados.
Para el control de aeronaves, en particular aeronaves no tripuladas, se emplean cámaras, con cuya ayuda es monitorizado el espacio aéreo en torno a la aeronave. Para conseguir una vista de amplio alcance en torno a la aeronave se emplean módulos de imagen con varios sensores de imagen dispuestos uno junto a otro que por regla general representan un ángulo sólido de 220º x 30º. Tal monitorización del espacio aéreo es conocida por el documento EP 2 159 779 A1.
Si se desea otro campo visual, por ejemplo ampliado hacia arriba, hacia abajo o por detrás, se propone en el documento WO 2008/020889 A2 distribuir varias cámaras en el fuselaje de la aeronave. Por una evaluación central de las imágenes de todas las cámaras puede ser monitorizado el espacio aéreo completo en torno a la aeronave.
Por el documento WO 2007/144 386 A1 es conocido emplear para el análisis de procesos cinéticos en sistemas biológicos una cámara que procesa ella misma una secuencia de imágenes para la cinética celular mediante una unidad lógica existente en la cámara.
Es un objeto de la presente invención indicar un procedimiento para monitorizar un espacio aéreo en torno a una aeronave que se pueda emplear de forma fácil y eficiente incluso en aeronaves pequeñas.
Este objeto se lleva a cabo por un procedimiento del tipo mencionado al principio, en el que según la invención cada módulo de imagen comprende unos medios de tratamiento de imagen propios que realizan el reconocimiento del objeto volante en base a las imágenes parciales captadas por el módulo de imagen y emiten un resultado de reconocimiento, y el espacio aéreo es monitorizado empleando los resultados de reconocimiento de los módulos de imagen.
La invención parte así de la consideración de que las aeronaves pequeñas a menudo no están equipadas de forma estándar con una monitorización del espacio aéreo que sea suficiente para los requisitos de una tarea, por ejemplo cuando para una determinada misión es necesaria una visión panorámica o deben ser empleadas cámaras especiales, es necesaria una técnica de exploración especial o similar. Para ello la aeronave debería ser equipada o reequipada en cada caso con sistemas especiales que cooperen con una unidad de monitorización central para el tratamiento de imagen, reconocimiento de objetos volantes y monitorización del espacio aéreo. El gasto de la armonización de la unidad de monitorización central con los módulos de imagen es, por tanto, alto. Además un cableado correspondiente es costoso, ya que debido a la alta tasa de transferencia de datos de imagen son necesarios cables especiales y apantallados, que en particular en un espacio aéreo pequeño son tendidos de forma no estandarizada.
Por el reconocimiento de objetos volantes según la invención ya en el módulo de imagen, esto es, in situ en el sensor de imagen que representa el espacio aéreo parcial, basta con transmitir solo resultados de reconocimiento sencillos, por ejemplo a la unidad de monitorización central. Un cableado puede ser mantenido fácilmente ya que los resultados de reconocimiento habitualmente requieren una tasa de datos considerablemente menor que la transferencia de datos de imagen. Además puede realizarse un reconocimiento de objetos volantes especial en el propio módulo de imagen, de manera que la unidad de monitorización central de la aeronave pueda ser concebida de forma más sencilla y pueda por tanto ser realizada de forma estandarizada. Por tanto se puede prescindir de una evaluación de la imagen en una unidad de monitorización central. Una aeronave sencilla y pequeña puede así ser equipada o reequipada con poco gasto, de manera que sea posible una monitorización del espacio aéreo muy especial que corresponda a los requisitos de un uso actual.
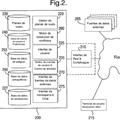
Los resultados de reconocimiento de los módulos de imagen individuales pueden ser transmitidos a una unidad de monitorización central de la aeronave que realice la monitorización del espacio aéreo y emita datos, por ejemplo, para la realización de un control del vuelo, para la defensa de un ataque o para la advertencia de un piloto, en particular en la base. Para ello la unidad de monitorización central está convenientemente preparada para emitir las señales correspondientes, por ejemplo para el control de actuadores para el control de vuelo, defensa y/o emisión de advertencias. Alternativamente a una única unidad de monitorización central pueden asumir estas tareas varias unidades, pudiendo ser estas unidades también los propios módulos de imagen, de manera que estos en red realicen juntos la monitorización del espacio aéreo. Para ello un módulo de imagen puede asumir un papel central, tal como una coordinación de un flujo de datos, los casos finales de decisiones para el reconocimiento de objetos volantes o similares.
Los módulos de imagen están ventajosamente dispuestos distribuidos en la aeronave, por ejemplo a través del fuselaje de la aeronave. Convenientemente al menos un módulo de imagen está orientado hacia delante y un
módulo de imagen hacia atrás. En cualquier caso están dispuestos separados espacialmente uno de otro, esto es, no alojados en una carcasa común, con la excepción de un fuselaje de la aeronave común. Cada módulo de imagen dispone de una carcasa propia con ventajosamente unos medios de fijación para la fijación sobre o dentro de la aeronave, por ejemplo sobre o dentro del fuselaje.
La representación del espacio aéreo parcial sobre el sensor de imagen se realiza mediante la óptica de representación, por ejemplo un objetivo. Ventajosamente el reconocimiento del objeto volante se realiza basándose en las imágenes parciales captadas por el módulo de imagen que son examinadas en busca de la presencia de objetos volantes representados. Para ello los medios de tratamiento de imagen recurren a las imágenes parciales captadas por el propio módulo de imagen. Cada módulo de imagen emplea, por tanto, de forma ventajosa solo las imágenes parciales captadas por el propio sensor de imagen. El resultado de reconocimiento puede ser transmitido directa o indirectamente a una unidad de monitorización central. Esta, a partir de ello, puede sacar consecuencias para el comportamiento de la aeronave.
La unidad de monitorización central puede ser un ordenador existente de forma estándar en la aeronave, por ejemplo un ordenador de control para el control de los procesos de vuelo. Es posible también que la unidad de monitorización central sea un ordenador central perteneciente al sistema de los diversos módulos de imagen que esté preparado para realizar tareas de monitorización. En cualquier caso está preparado para comunicar con los diversos módulos de imagen y recibir los resultados de reconocimiento. Los resultados de reconocimiento pueden ser obtenidos a partir de un tratamiento de imagen que es realizado por el módulo de imagen correspondiente.
Un sistema de monitorización del espacio aéreo especialmente sencillo y de estructura modular puede conseguirse si la transferencia de datos desde los módulos de imagen a una unidad de monitorización central se realiza sin hilos. Los módulos de imagen pueden estar dispuestos muy libremente sobre o dentro de la aeronave sin que sea necesario un cableado a través de la aeronave. La transferencia de datos sin hilos posibilita también que la transferencia de los resultados de reconocimiento sea posible con una tasa de transferencia de datos relativamente pequeña, ya que no todos los contenidos de imagen deben ser transferidos a la unidad de monitorización central.
En otra forma de realización ventajosa de la invención, el reconocimiento del objeto volante incluye una detección de un objeto volante representado en una imagen parcial y una determinación de sus coordenadas angulares. En este sentido el objeto volante es clasificado como tal y puede ser documentado con datos correspondientes. Las coordenadas angulares pueden ser determinadas respecto al campo visual del módulo de imagen o con referencia a una dirección de la aeronave.
El resultado de reconocimiento transmitido puede contener el objeto volante detectado o datos de detección para el objeto volante, en particular sus... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la monitorización de un espacio aéreo en torno a una aeronave (2) , la cual está equipada con varios módulos de imagen (6a-6h) con, respectivamente, al menos una óptica de representación (10) y un sensor de imagen (12) , en el que los sensores de imagen (12) captan, respectivamente, una imagen parcial del entorno y unos medios de tratamiento de imagen (16) que empleando las imágenes parciales examinan el entorno en busca de otros objetos volantes 34 representados, caracterizado por que cada módulo de imagen (6a-6h) comprende unos medios de tratamiento de imagen propios que realizan el reconocimiento del objeto volante en base a las imágenes parciales captadas por el módulo de imagen (6a-6h) y emiten un resultado de reconocimiento, y el espacio aéreo es monitorizado empleando los resultados de reconocimiento de los módulos de imagen (6a-6h) .
2. Procedimiento según la reivindicación 1, caracterizado por que la transferencia de datos desde los módulos de imagen (6a-6h) a una unidad de monitorización central (28) se realiza sin hilos.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por que el reconocimiento del objeto volante incluye una detección de un objeto volante (34) representado en la imagen parcial y una determinación de sus coordenadas angulares.
4. Procedimiento según una las reivindicaciones anteriores, caracterizado por que el reconocimiento del objeto volante incluye una detección del objeto volante (34) a partir de una única imagen parcial.
5. Procedimiento según una las reivindicaciones anteriores, caracterizado por que el reconocimiento del objeto volante incluye una evaluación de un objeto volante (34) representado en la imagen parcial en cuanto a un potencial de peligro.
6. Procedimiento según una las reivindicaciones anteriores, caracterizado por que los módulos de imagen (6a-6h) están dispuestos en diferentes posiciones en la aeronave (2) y un control de sensor de los módulos de imagen (6a6h) individuales se realiza dependiendo de su posición y por tanto de forma diferente.
7. Procedimiento según una las reivindicaciones anteriores, caracterizado por que los módulos de imagen (6a-6h) están dispuestos en diferentes posiciones en la aeronave (2) y el reconocimiento del objeto volante de los módulos de imagen (6a-6h) individuales se realiza dependiendo de su posición y por tanto de forma diferente.
8. Sistema para la monitorización de un espacio aéreo en torno a una aeronave (2) con varios módulos de imagen (6a-6h) que, respectivamente, en una carcasa (8) contienen una óptica de representación (10) y un sensor de imagen (12) , caracterizado por que en la carcasa (8) están dispuestos, respectivamente, unos medios de tratamiento de imagen (16) que están preparados para realizar un reconocimiento de objeto volante en base a las imágenes parciales del entorno captadas por el sensor de imagen (12) .
9. Aeronave (2) con un sistema según la reivindicación 8 y una unidad de monitorización central (28) que está preparada para emitir señales de control de vuelo empleando los resultados de reconocimiento de los módulos de imagen (6a-6h) .
10. Aeronave según la reivindicación 9, caracterizada por que la unidad de monitorización central (28) comprende unos medios de detección (24) de módulo de imagen que están preparados para cooperar con muchos módulos de imagen (6a-6h) diferentes y con ello detectar el número de los módulos de imagen (6a-6h) empleados en ese momento para la monitorización del espacio aéreo y cooperar con estos.
11. Aeronave según la reivindicación 9 ó 10, caracterizada por varios alojamientos (36) preparados para el alojamiento y funcionamiento de un módulo de imagen (6a-6h) respectivo.
12. Aeronave según una de las reivindicaciones 9 a 11, caracterizada por que diferentes tipos de módulos de imagen (6a-6h) están distribuidos en posiciones geométricamente diferentes en el fuselaje de la aeronave (2) .
Patentes similares o relacionadas:
 Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
SISTEMA Y METODO DE CONTROL OPERATIVO DE UNA AERONAVE NO TRIPULADA, del 26 de Marzo de 2020, de ARBOREA INTELLBIRD S.L: esumenesumen esumen Sistema y método para el control operativo de una aeronave no tripulada, cuyo fin es imposibilitar el despegue de la aeronave si no se ha pedido […]
Sistema y procedimiento para la gestión de la actividad de aviones mediante la utilización de analítica de vídeo, del 19 de Febrero de 2020, de Airbus Group India Private Limited: Procedimiento para la gestión de la actividad en la zona de operaciones mediante la utilización de analítica de vídeo , que comprende: […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado y un sistema para su aplicación, del 11 de Diciembre de 2019, de Aerobits Sp. z o.o: Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado, en un sistema, en el que una o más luces de advertencia están […]
Sistema de seguimiento para aeronaves no tripuladas, del 4 de Diciembre de 2019, de Airbus Defence and Space GmbH: Sistema para navegación de avión, que comprende: un primer avión con una primera unidad de comunicación que comprende un radar ; […]