Procedimiento para la operación de un robot y dispositivo con un robot.
Procedimiento para la operación de un robot (10) que comprende una cinemática (14) y un efector terminal (16) acoplado a la cinemática (14) para transferir productos alimenticios (21),
caracterizado porque el efector terminal (16) se limpia automáticamente cuando cumple un criterio de limpieza.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10015144.
Solicitante: WEBER MASCHINENBAU GMBH BREIDENBACH.
Nacionalidad solicitante: Alemania.
Dirección: GÜNTHER-WEBER-STRASSE 3 35236 BREIDENBACH ALEMANIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
- B65G47/91 B65G 47/00 […] › que tienen pinzas neumáticas, p. ej. aspirantes.
PDF original: ES-2494417_T3.pdf
Fragmento de la descripción:
Procedimiento para la operación de un robot y dispositivo con un robot
La presente invención se refiere a un procedimiento para la operación de un robot que comprende una cinemática y un efector terminal acoplado a la cinemática para transferir productos alimenticios. Además, la invención se refiere a un dispositivo con dicho robot.
Los robots del tipo mencionado se usan por ejemplo en la industria alimentaria para transferir productos alimenticios, tales como carne, embutidos o quesos, de un primer medio transportador a un segundo medio transportador, clasificarlos o introducirlos en un envase. Para este fin, el efector terminal se mueve mediante la cinemática con respecto a una base estacionaria. El efector terminal puede ser cualquier herramienta mediante la que los productos correspondientes se puedan recoger, transportar y depositar. Por ejemplo, puede estar previsto un elemento de agarre de productos que presente dos hojas de pala que agarren los productos por debajo o un dispositivo de succión por vacío.
Por el contacto del efector terminal con los productos alimenticios pueden producirse contaminaciones en el efector terminal que resultan problemáticas con vistas a la higiene. Por ejemplo, pueden quedar adheridos restos de productos al efector terminal o se puede formar una fina película de material biológico. Una limpieza correspondiente por el usuario es complicada y requiere una interrupción indeseablemente larga del servicio del robot.
El documento US2004/0139989A1 da a conocer un dispositivo para elevar y clasificar huevos transportados en una instalación de transporte. El dispositivo puede comprender un juego de elementos de agarre por vacío que estén montados en una plataforma móvil y que se puedan mover hacia arriba y abajo mediante un empujador neumático.
El documento EP0045512A2 da a conocer un brazo pinza para un robot industrial, que presenta un dispositivo de suministro de aire comprimido y que está provisto de toberas de soplado. Las toberas de soplado sirven para eliminar virutas de una herramienta que ha de ser agarrada o del brazo pinza del robot. Sin embargo, las toberas de soplado no resultan adecuadas para limpiar un efector terminal realizado para transferir productos alimenticios.
La invención tiene el objetivo de aumentar en un robot del tipo genérico, con la menor intervención en la secuencia de funcionamiento, el grado de calidad de higiene.
El objetivo se consigue mediante un procedimiento con las características de la reivindicación 1.
Según la invención, el efector terminal se limpia automáticamente cuando cumple el criterio de limpieza. El criterio de limpieza se puede definir en función de la aplicación concreta y de las especificaciones de higiene. Si se cumple el criterio de limpieza, la limpieza del efector terminal puede ser activada por un dispositivo de control externo. De esta manera, queda garantizado siempre el cumplimiento de las especificaciones de higiene, especialmente sin que se necesaria la intervención activa de un usuario.
Según una forma de realización, el efector terminal que ha de limpiarse se mueve automáticamente, especialmente por medio del robot mismo, a la zona de acción de un dispositivo de limpieza y se limpia por este. Preferentemente, el efector terminal es introducido directamente por el robot en el dispositivo de limpieza. Para ello, el dispositivo de limpieza se encuentra de manera ventajosa dentro de una zona de acción del robot pudiendo formar especialmente parte del dispositivo de transferencia de productos. Alternativamente, sin embargo, el efector terminal también podría ser introducido por el robot en una estación de acoplamiento, en la que se desacopla de la cinemática y desde donde se sigue transportando a la zona de acción del dispositivo de limpieza.
Según otra forma de realización, el efector terminal que ha de limpiarse se desacopla de la cinemática antes de su limpieza. Un efector terminal desacoplado puede limpiarse fácilmente y especialmente desde por todos los lados, mientras el robot queda disponible para otros fines durante la limpieza del efector terminal y no tiene que permanecer de forma inmóvil en una posición de limpieza.
Además, después del desacoplamiento del efector terminal que se ha de limpiar se puede acoplar a la cinemática un efector terminal de sustitución limpio y se puede continuar el traslado de productos alimenticios durante la limpieza. Esto resulta ventajoso, porque entonces la limpieza no causa ninguna interrupción notable del servicio de traslado de productos y no se produce ninguna pérdida de velocidad o de rendimiento en el servicio de la instalación de procesamiento de productos correspondiente. Al mismo tiempo, la limpieza del efector terminal se puede realizar con el esmero correspondiente a las especificaciones, ya que al seguir funcionando el robot se
dispone de tiempo suficiente para la limpieza.
Según otra forma de realización, como efector terminal de sustitución se acopla a la cinemática un efector terminal limpiado previamente. Para este fin, el dispositivo de limpieza puede estar realizado de tal forma que quepan en él varios efectores terminales. Alternativamente, también puede estar previsto un segundo dispositivo de limpieza del que se pueda extraer un efector terminal de sustitución limpio. En ambos casos se suprime la puesta a disposición complicada de efectores terminales de sustitución nuevos. Más bien, se realiza tan sólo un cambio o reemplazo de efectores terminales dentro de un juego existente de por sí.
De manera ventajosa, tanto el desacoplamiento del efector terminal de la cinemática como el acoplamiento del efector terminal de sustitución a la cinemática se realizan directamente en el dispositivo de limpieza. Por lo tanto, cuando se requiere una limpieza, en primer lugar, el efector terminal sucio se mueve al interior del dispositivo de limpieza y se desacopla de la cinemática. A continuación, la cinemática de la que se ha desacoplado el efector terminal sucio se mueve al efector terminal de sustitución igualmente situado en el dispositivo de limpieza o en otro dispositivo de limpieza y se acopla automáticamente a este.
Alternativamente, también puede estar prevista una estación de acoplamiento en la que se deposita un efector terminal sucio y se pone a disposición un efector terminal de sustitución limpio, pudiendo transportarse el efector terminal y el efector terminal de sustitución de un lado a otro entre la estación de acoplamiento y al menos un dispositivo de limpieza. Una estación de acoplamiento de este tipo constituye en cierto modo una interfaz entre el robot y el al menos un dispositivo de limpieza.
Según otra forma de realización, la limpieza automática se realiza en intervalos de tiempo predeterminados, especialmente periódicos. Una detección sensorial del estado de suciedad del efector terminal no es precisa en este caso. Por lo tanto, el control del robot y del dispositivo de limpieza pueden estar realizados de forma especialmente sencilla.
Alternativamente o adicionalmente, la limpieza automática se puede realizar también al cabo de un número predeterminado de procesos de transferencia. En este caso, se tiene en cuenta que el ensuciamiento o la contaminación se producen principalmente durante un proceso de transferencia, de modo que por el número de procesos de transferencia se puede deducir de forma relativamente fiable el grado de suciedad real. Los dos criterios "intervalo de tiempo " y "número de procesos de traslado" también pueden asociarse entre ellos de manera adecuada. Por ejemplo, es posible que se realice una limpieza automática únicamente cuando existe un intervalo de tiempo predeterminado con respecto cambio de efector terminal anterior y si adicionalmente se ha realizado un número predeterminado de procesos de transferencia desde el cambio de efector terminal anterior.
Alternativamente o adicionalmente, el grado de ensuciamiento o de contaminación del efector terminal puede detectarse por sensores, iniciándose una limpieza cada vez que el grado de ensuciamiento o de contaminación detectado exceda un valor umbral.
El objetivo de la invención se consigue además mediante un dispositivo con las características de la reivindicación 9. El dispositivo según la invención comprende un robot que presenta una cinemática y un efector terminal acoplado a la cinemática para la transferencia de productos alimenticios, y un dispositivo de limpieza para la limpieza automática del efector terminal cuando este cumple un criterio de limpieza. Con la ayuda del dispositivo según la invención se puede realizar el procedimiento según la invención, de forma que las ventajas descritas anteriormente se refieren... [Seguir leyendo]
Reivindicaciones:
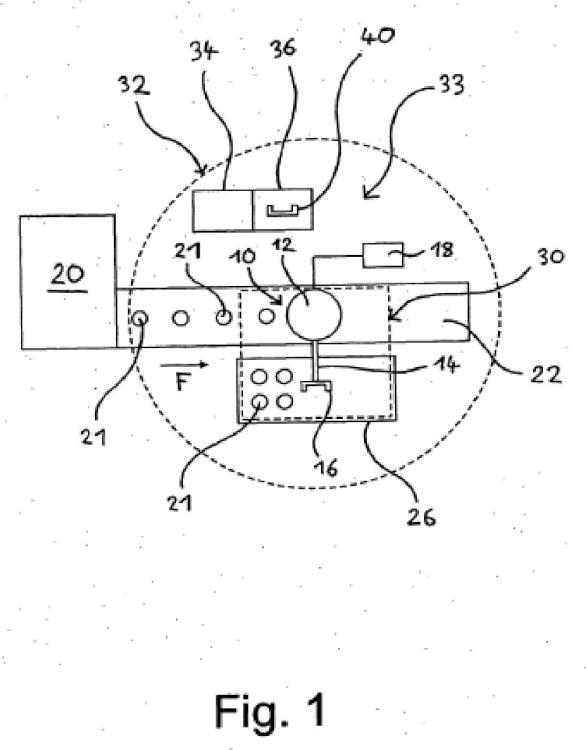
1. Procedimiento para la operación de un robot (10) que comprende una cinemática (14) y un efector terminal (16)
acoplado a la cinemática (14) para transferir productos alimenticios (21) , caracterizado porque el efector terminal 5 (16) se limpia automáticamente cuando cumple un criterio de limpieza.
2. Procedimiento según la reivindicación 1, caracterizado porque el efector terminal (16) que se ha de limpiar se mueve automáticamente a la zona de acción de un dispositivo de limpieza (34) y se limpia por este.
3. Procedimiento según la reivindicación 1 o 2, caracterizado porque el efector terminal (16) que ha de limpiarse se desacopla de la cinemática (14) antes de su limpieza.
4. Procedimiento según la reivindicación 3, caracterizado porque después del desacoplamiento del efector terminal (16) que se ha de limpiar se puede acoplar a la cinemática (14) un efector terminal de sustitución (40) 15 limpio y se puede continuar el traslado de productos alimenticios (21) durante la limpieza.
5. Procedimiento según la reivindicación 4, caracterizado porque como efector terminal de sustitución (40) se acopla a la cinemática (14) un efector terminal limpiado previamente.
6. Procedimiento según la reivindicación 4 o 5, caracterizado porque el desacoplamiento del efector terminal (16) de la cinemática (14) y el acoplamiento del efector terminal de sustitución (40) a la cinemática (14) se realizan en el dispositivo de limpieza (34, 36) .
7. Procedimiento según al menos una de las reivindicaciones anteriores, caracterizado porque la limpieza 25 automática se realiza en intervalos de tiempo predeterminados, especialmente periódicos.
8. Procedimiento según al menos una de las reivindicaciones anteriores, caracterizado porque la limpieza automática se realiza al cabo de un número predeterminado de procesos de transferencia.
9. Dispositivo, especialmente para la realización del procedimiento según una de las reivindicaciones anteriores, con un robot (10) que comprende una cinemática (14) y un efector terminal (16) acoplado a la cinemática (14) para transferir productos alimenticios (21) caracterizado por un dispositivo de limpieza (34) para la limpieza automática del efector terminal (16) al cumplir un criterio de limpieza.
10. Dispositivo según la reivindicación 9, caracterizado porque el dispositivo de limpieza (34) está dispuesto dentro de una zona de acción (32) del robot (10) .
11. Dispositivo según la reivindicación 9 o 10, caracterizado porque en el dispositivo de limpieza (36) existe un efector terminal de sustitución (40) limpio que se puede acoplar a la cinemática (14) en lugar del efector terminal 40 (16) que se ha de limpiar.
Patentes similares o relacionadas:
Dispositivo y procedimiento para desembalar y alimentar envueltas de envase plegadas de manera plana y verticales, del 10 de Junio de 2020, de SIG TECHNOLOGY AG: Dispositivo para transferir envolturas de envase plegadas de manera plana y verticales a una unidad de procesamiento subsiguiente, en particular una máquina llenadora para […]
Ventosa de aspiración y procedimiento para asir rodajas elásticas, del 27 de Mayo de 2020, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Ventosa de aspiración para el uso como dispositivo de separación de rodajas elásticas de una pila de rodajas, con una campana de aspiración […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
Dispositivo para recoger artículos, del 15 de Enero de 2020, de CT PACK S.R.L.: Un dispositivo para recoger artículos , que comprende una unidad de soporte y una pluralidad de cabezales de agarre portados mediante la unidad de soporte , […]
Silenciador para pinza de succión, del 25 de Diciembre de 2019, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Silenciador con una carcasa dotada de una entrada que puede unirse con el conducto de gas de escape de una pinza de succión y con […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]
Dispositivo de ventosas y transportador por aspiración con un dispositivo de ventosas de este tipo, del 9 de Octubre de 2019, de Putz, Stefan: Dispositivo de ventosas para un transportador por aspiración que comprende una ventosa para recoger un producto, en donde la ventosa define una cámara de aspiración […]
Dispositivo de transporte de piezas y método para transportar piezas, del 17 de Abril de 2019, de FAGOR ARRASATE, S. COOP: Dispositivo de transporte de piezas, en particular de piezas en forma de placa, que comprende un medio transportador para transportar […]