Giravión.
Giravión (100), que comprende al menos cuatro rotores (110) dispuestos en elementos portantes (120a,
120b),
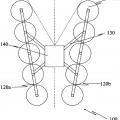
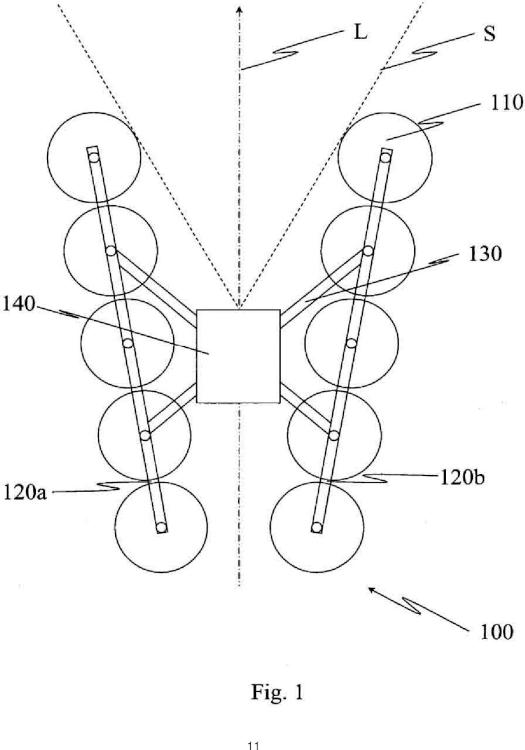
en el que los rotores (110) y los elementos portantes (120a, 120b) están dispuestos de manera que a lo largo de un eje longitudinal (L) del giravión (100) se define un campo visual libre (S) al menos entre dos rotores extremos, y los elementos portantes (120a, 120b) proporcionan una conexión rectilínea entre los rotores respectivamente en un lado del eje longitudinal (L), caracterizado porque los elementos portantes (120a, 120b) están dispuestos simétricamente en forma de V respecto al eje longitudinal.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/001965.
Solicitante: Ascending Technologies GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Konrad-Zuse-Bogen 4 82152 Krailling ALEMANIA.
Inventor/es: ACHTELIK,MICHAEL, STUMPF,JAN, GURDAN,DANIEL, DOTH,KLAUS-MICHAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C27/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 27/00 Giroaviones; Sus rotores específicos (dispositivos de aterrizaje B64C 25/00). › con dos o más rotores.
- B64D47/08 B64 […] › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › B64D 47/00 Equipamiento no previsto en otro lugar. › Disposiciones de cámaras.
PDF original: ES-2502523_T3.pdf
Fragmento de la descripción:
Giravión
[1] La invención se refiere en general a giraviones con una multiplicidad de rotores. La invención se refiere más especialmente a un giravión que es apropiado en particular para la elaboración de registros fotográficos y de vídeo desde el aire.
[2] Los giraviones con una multiplicidad de rotores se conocen adecuadamente en el estado de la técnica. 1 Actualmente los más difundidos son los quadrocopters que están definidos por cuatro rotores dispuestos en un plano, que actúan esencialmente perpendicularmente hacia abajo. La ventaja de los giraviones con varios rotores consiste en general en que los tres ejes de vuelo, eje longitudinal, eje transversal y eje vertical se pueden controlar sólo mediante variación del empuje de los rotores individuales.
[3] Aeronaves semejantes se usan cada vez con más frecuencia para la elaboración de registros fotográficos y de vídeo desde el aire. En este caso se usan en particular giraviones similares a helicópteros, controlados manualmente o autónomos.
[4] Por el documento DE 1256174A1 se conoce un sistema de vuelo multi-rotor, en el que los rotores 2 están realizados de forma ajustable colectivamente independientemente unos de otros.
[5] Por el documento DE 2261399U1 se conoce una aeronave, en particular quadrocopter, con un elemento base colocado centralmente y en particular brazos colocados en el elemento base de forma separable a través de una conexión enchufable y atornillable.
[6] Por el documento DE 12621182A1 se conoce una aeronave con cuatro rotores de accionamiento horizontales, de los que dos dividen dispuestos uno sobre otro un eje de rotación común.
[7] El artículo "McKerrow, P, Modelling the Draganflyer four-rotor hellcopter, Proceedlngs of the IEEE 3 International Conference on Robotics and Automation, 26 de abril - 1 de mayo de 24, 3596-361. Copyright IEEE
24, http://ro.uow.edu.au/infoDaDers/1 " describe un helicóptero de 4 rotores teleguiado y describe una análisis teórico de las propiedades dinámicas de este helicóptero para el desarrollo de un sistema de control Informático para un vuelo estacionario estable.
[8] El documento AT 23 876 B describe un helicóptero con al menos dos tornillos portantes con el objetivo de ampliar la posibilidad de uso de un helicóptero semejante.
[9] El documento US 6 26 796 B1 da a conocer un sistema de control de retroacción para un helicóptero
multi-rotor.
[1] El documento DE 1 25 1 336 A1 describe un helicóptero con tres o más unidades de elevación con respectivamente al menos un rotor y al menos un motor de corriente continua conmutado electrónicamente y que acciona el rotor. En este caso para preferentemente cada unidad de elevación está previsto al menos un sensor para la detección del giro de un componente rotativo de la unidad de elevación.
[11] El documento EP 1 91 153 A1 da a conocer un helicóptero autónomo en miniatura con varios rotores y un procedimiento para el control de un helicóptero semejante mediante aplicación de un ajuste en tiempo real durante la evaluación de los parámetros de vuelo del helicóptero.
[12] El documento WO 25/35362 A1 describe un medio de transporte de carga con medios de transferencia, que comprende dos sistemas de rotor dispuestos en paralelo, para un movimiento de la carga hasta una altura de 8 km sobre la superficie terrestre.
[13] Además, se conoce el documento US 2, 987, 272 que representa el estado de la técnica más próximo y da 55 a conocer el preámbulo de la reivindicación 1.
[14] Las aeronaves del estado de la técnica tienen en común que las cargas, como por ejemplo elementos ópticos o sensores, por ejemplo para la toma de fotos o grabación de vídeo o detección del entorno se deben colocar por debajo o por encima del plano de rotores de forma central en la aeronave, a fin de distribuir la carga de
forma uniforme sobre los rotores individuales. Una consecuencia de ello es que el campo visual de los elementos ópticos o sensores está limitado por el plano de rotores y otras partes del sistema portante. En el caso de tomas de fotos y grabaciones de videos aparecen partes del sistema portante en la imagen, por ejemplo, en el caso de ángulo de apertura demasiado grande o inclinación demasiado baja de la cámara hacia abajo (en el montaje por debajo del 5 plano de rotores) o hacia arriba (en el montaje por encima del plano de rotores).
[15] Además, un giravión se debe inclinar, condicionado por el sistema e Independientemente del número de rotores, en la dirección de marcha para acelerar en esta dirección. Esto requiere en algunas aplicaciones una compensación de inclinación activa para los elementos ópticos o sensores a fin de garantizar que el objeto a
detectar no abandone la zona de detección debido a la inclinación. En el estado de la técnica, a causa de la compensación de inclinación en el caso de ángulos de inclinación demasiado grandes sobresalen partes del sistema portante en la zona de detección. De este modo se limita aun más el espacio de imagen sin perturbaciones de estos elementos.
[16] En consecuencia el objetivo de la invención es proporcionar un giravión que supere estas desventajas del estado de la técnica. Este objetivo se resuelve mediante las características de la reivindicación 1, mientras que están definidas formas de realización ventajosas en las reivindicaciones dependientes.
[17] Según la finalidad arriba mencionada se proporciona un giravión, que comprende al menos cuatro rotores
dispuestos en elementos portantes, estando dispuestos los rotores y elementos portantes de manera que a lo largo de un eje longitudinal de la aeronave se define un campo visual libre al menos entre dos rotores extremos y los elementos portantes proporcionan una conexión rectilínea entre los rotores respectivamente en un lado del eje longitudinal, estando dispuestos los elementos portantes simétricamente en forma de V respecto al eje longitudinal.
[18] De este modo por los elementos ópticos y/o sensores, dispuestos en la aeronave según la invención se hace posible por primera vez detectar de forma continua y sin perturbaciones tanto las zonas por encima y por debajo del plano de rotores, como también la zona en el interior del plano de rotores a lo largo de al menos una dirección del eje longitudinal de la aeronave. Así se puede plvotar en particular un único elemento óptico y/o sensor de una zona por encima del plano de rotores, a través del plano de rotores, y hacia una zona por debajo del plano de
rotores, y a la inversa, sin que durante la pivotación sobresalgan los componentes de la aeronave en la zona de imagen o detección del elemento óptico y/o sensor.
[19] A diferencia de los sistemas del estado de la técnica, por una cámara en la aeronave según la Invención es posible, por ejemplo, detectar objetos o personas durante las filmaciones sin cambio de configuración, tanto desde
abajo como también inclinadamente desde delante, desde delante o desde arriba. Además, en la aeronave según la invención en un único vuelo se pueden hacer grabaciones desde abajo (p. ej. al volar por debajo de un puente) como también del lado o desde arriba. Por primera vez, para los distintos tipos de grabaciones no es necesario desmontar la cámara. La zona de pivotación de la cámara puede ser considerablemente mayor que en los sistemas convencionales.
[2] Por consiguiente la cámara en la aeronave según la invención puede adoptar cualquier orientación en el espacio, es decir, detectar de forma esférica cada punto del entorno. Un mecanismo de pivotación apropiado puede efectuar en este caso la pivotación descrita de la cámara en la dirección vertical, mientras que la modificación horizontal de la zona de detección se realiza a través del giro de toda la aeronave alrededor de su eje vertical.
[21] Además, la zona de pivotación de la cámara en la aeronave según la Invención puede ser Independiente del movimiento de cabeceo de la aeronave. Con una suspensión compensada en inclinación de los elementos ópticos y/o sensores se puede inclinar a voluntad la aeronave para la aceleración y frenado, sin que se perturbe la detección por las partes de rotor o soporte que sobresalen en la zona de detección. Esto se garantiza tanto en una
orientación actual de la detección hacia abajo, hacia delante como también hacia arriba.
[22] Una aeronave semejante se puede usar en todas partes donde encuentran uso actualmente los helicópteros y sistemas de quadrocopters convencionales. Pero también se puede usar en grabaciones que requieren un margen de tolerancia de movimiento vertical esencialmente mayor de la cámara.
[23] El eje longitudinal o eje de... [Seguir leyendo]
Reivindicaciones:
1. Giravión (100) , que comprende al menos cuatro rotores (110) dispuestos en elementos portantes (120a, 120b) , en el que los rotores (110) y los elementos portantes (120a, 120b) están dispuestos de manera que a lo largo de un eje longitudinal (L) del giravión (100) se define un campo visual libre (S) al menos entre dos rotores extremos, y los elementos portantes (120a, 120b) proporcionan una conexión rectilínea entre los rotores respectivamente en un lado del eje longitudinal (L) , caracterizado porque los elementos portantes (120a, 120b) están dispuestos simétricamente en forma de V respecto al eje longitudinal.
2. Giravión según la reivindicación 1, caracterizado porque los elementos portantes (120a, 120b) se extienden esencialmente de forma rectilínea en 15 ambos lados del eje longitudinal (L) .
3. Giravión según una de las reivindicaciones anteriores, caracterizado porque el campo visual libre (S) , partiendo del centro de gravedad de la aeronave, presenta una 20 extensión respecto al eje longitudinal de más de ± 15º tanto en el plano horizontal como también en el vertical.
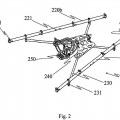
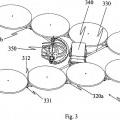
4. Giravión según una de las reivindicaciones anteriores, caracterizado porque el giravión comprende además un elemento de arriostramiento (130) para el arriostramiento 25 de los elementos portantes (120a, 120b) .
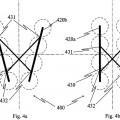
5. Giravión según la reivindicación 4, caracterizado porque el al menos un elemento de arriostramiento (130) está configurado en forma de una X. 30
6. Giravión según una de las reivindicaciones 4 ó 5, caracterizado porque las conexiones entre el al menos un elemento de arriostramiento (130) y los elementos portantes (120a, 120b) están configuradas de forma separable y/o rotativa. 35
7. Giravión según una de las reivindicaciones anteriores, que comprende además un elemento de fuselaje (140) con al menos una sujeción para la recepción de al menos un elemento óptico y/o sensor. 40
8. Giravión según la reivindicación 7, caracterizado porque la al menos una sujeción está dispuesta de forma ajustable cerca del centro de gravedad del giravión. 45
9. Uso de un giravión según la reivindicación 7 u 8 para la detección del entorno mediante los elementos ópticos y/o sensores dispuestos en éste.
Patentes similares o relacionadas:
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
DISPOSITIVO MÓVIL DE GENERACIÓN DE IMÁGENES 3D MEDIANTE HAZ LÁSER PLANO, del 26 de Marzo de 2020, de UNIVERSIDAD CARLOS III DE MADRID: La invención describe un dispositivo móvil de generación de imágenes 3D mediante haz láser plano que comprende: un dron configurado para desplazarse […]
Dispositivo móvil de generación de imágenes 3D mediante haz láser plano, del 23 de Marzo de 2020, de UNIVERSIDAD CARLOS III DE MADRID: La invención describe un dispositivo móvil de generación de imágenes 3D mediante haz láser plano que comprende: un dron configurado […]
Aeronave que comprende un brazo retráctil provisto de un detector de obstáculos, del 11 de Marzo de 2020, de Safran Electronics & Defense: Aeronave comprendiendo: una estructura , un aterrizador , montado en la estructura de la aeronave, y al menos un detector de […]
Aparato y método de carga útil de aeronave, del 22 de Mayo de 2019, de BAE SYSTEMS PLC: Un método de habilitar un aparato para uso en una aeronave , comprendiendo el método: habilitar un primer almacén y una primera carga útil, […]
SISTEMA DE INSPECCIÓN EN VUELO Y PROCEDIMIENTO PARA DICHO SISTEMA, del 29 de Abril de 2019, de INGENIO 3000, S.L: Sistema de inspección en vuelo, del tipo que comprenden, al menos, un sensor óptico para toma de imágenes montado en un gimbal a su vez montado […]
Método y sistema para referenciación geométrica de datos multiespectrales, del 6 de Marzo de 2019, de VITO NV: Un dispositivo de detección para obtener datos geométricos de imagen multiespectral referenciada de una región de interés en movimiento relativo con respecto al dispositivo […]
Sistemas de cámaras aéreas de área amplia, del 6 de Marzo de 2019, de nearmap australia pty, ltd: Un sistema para capturar imágenes aéreas del suelo, con módulos de cámara que tienen campos de visión ópticos del suelo en forma de dos tiras (650a, 650b) de longitud finita, […]