Brazo robótico para el control del movimiento del brazo.
Un brazo robótico (100) para controlar el movimiento del brazo deun usuario,
y constituido por una cadena cinemática que se en suzona distal comprende un soporte (190) para posicionar la mano del usuario, y caracterizada por que dicha cadena cinemática poseeredundancia en dicha zona distal, de forma que el movimiento dela mano del usuario puede ser desacoplado del movimiento del resto de las partes de la cadena cinemática.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2009/070305.
Solicitante: UNIVERSIDAD MIGUEL HERNANDEZ.
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ JOVER,EDUARDO, PEREZ VIDAL,CARLOS, SABATER NAVARRO,JOSE MARIA, GARCIA ARACIL,NICOLAS MANUEL, AZORIN POVEDA,JOSE MARIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61H1/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 1/00 Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados . › Aparatos para ejercicios de extensión o flexión.
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
PDF original: ES-2506140_T3.pdf
Fragmento de la descripción:
Brazo robótico para el control del movimiento del brazo
La presente invención se relaciona con un brazo robótico y más específicamente con un brazo robótico para 5 utilizarse en tareas de rehabilitación motora de miembros superiores.
ESTADO DE LA TÉCNICA
En la rehabilitación motora de miembros superiores, el paciente o usuario ejercita sus brazos con la finalidad de 10 mejorar o recuperar control sobre los mismos. Está técnica se utiliza principalmente en pacientes que han sufrido una parálisis parcial. La parálisis parcial puede estar ocasionada por múltiples causas comunes: esclerosis múltiple, un tumor o un accidente. La causa más común de la parálisis parcial es el infarto. Los pacientes afectados por parálisis parcial pueden beneficiarse de la rehabilitación motora en la que un fisioterapeuta sujeta el brazo del paciente y le provoca un movimiento repetitivo. Dentro de la rehabilitación motora existen varios métodos de 15 tratamiento. La Facilitación Propioceptiva Neuromuscular (FNP) es uno de ellos, y consiste en la estimulación de los sensores propioceptivos del paciente. Es posible para un paciente re-entrenar su cerebro para realizar ciertos movimientos, y de esta forma obtener control sobre dichos movimientos y sobre sus brazos. Los mejores resultados en la aplicación de este método se obtienen cuando el movimiento es repetitivo y se realiza por lo menos en doble sesión de 45 minutos durante un mes. Como es obvio, no siempre es posible dar este nivel de asistencia y cuidado a 20 todos los pacientes durante este largo periodo.
Los robots han sido desarrollados para ayudar en esta terapia. El brazo del paciente es colocado y sujetado en el extremo final de un brazo robótico que realiza el movimiento determinado provocando el movimiento conjunto del brazo del paciente. Un ejemplo de un robot de este tipo es el descrito en WO 2006/058442, donde se presenta un 25 sistema compuesto por varias unidades. La primera y segunda unidades determinan la posición del módulo superior de rotación del brazo, sobre el que se fija el brazo del paciente. El modulo superior de rotación del brazo es una estructura de dos piezas, y soporta una tercera unidad de rotación para el antebrazo. El módulo de rotación del brazo superior se une a un módulo de rotación de la muñeca a través de un módulo de rotación para el codo, el cual puede ser rotado y ubicado sobre el brazo del paciente de forma similar a la fijación del módulo de rotación del brazo 30 superior.
Aunque este sistema permite realizar diferentes movimientos en el brazo del paciente, es deseable una mejora que permita la realización de más movimientos y que se adapte mejor a la morfología del brazo del paciente. Por otra parte, se requiere un mejor control de fuerzas y movimientos producidos por el robot. Finalmente, la comodidad para 35 el paciente y para el fisioterapeuta debe mejorarse.
En el estado de la técnica es conocido el documento WO 2006/039403, que describe un sistema para su uso en rehabilitación y/o en terapia física para el tratamiento de heridas o de enfermedades. El sistema puede superar las disfunciones inducidas por gravedad en las parálisis de extremidades derivadas de ataques al corazón u otros 40 desórdenes neurológicos.
El documento US2008009771 se refiere a un exoesqueleto, o un robot llevable que posee articulaciones y conexiones correspondientes a las del cuerpo humano. El sistema y el método pueden ser utilizados en rehabilitación médica, simulaciones de realidad virtual y teleoperaciones, así como para el beneficio de personas con 45 discapacidad y poblaciones de personas sanas. El presente sistema incluye un exoesqueleto de los miembros superiores alimentado eléctricamente, con siete grados de libertad. Un ejemplo incluye la localización proximal de motores de impulsión y la localización distal de reducciones de cable-polea, de forma que se obtenga una baja inercia, articulaciones de alta rigidez, y transmisiones traseras operables que eliminen las fuerzas de retroceso.
No obstante, el sistema anterior no describe medios de posicionamiento de la mano del usuario, que sean capaces de flexionar y extender los dedos del usuario, haciendo posible la realización de programas FNP que tengan como objetivo también los músculos y las articulaciones de los dedos.
DESCRIPCIÓN DE LA INVENCIÓN 55
La presente invención logra la mejora de estos aspectos en al menos algunas de estos aspectos. El objetivo se logra con el brazo robótico reivindicado en la reivindicación 1.
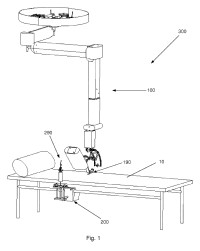
En un primer aspecto, la invención proporciona un brazo robótico (100) para el control del movimiento del brazo de 60 un usuario, que forma una cadena cinemática que se extiende desde un extremo proximal a un extremo distal y que comprende un soporte (190) para posicionar la mano del usuario en dicho extremo distal, caracterizado por el hecho de que dicha cadena cinemática posee al menos una redundancia cinemática en una zona distal de forma que el movimiento de la mano del usuario puede ser desacoplado del movimiento de las otras partes de la cadena cinemática. 65
El paciente ubica su mano en el soporte colocado en el extremo distal. En este módulo, la redundancia cinemática diseñada permite independizar las sub-cadenas, lo que quiere decir que el robot puede mover toda su cadena cinemática, excepto el módulo donde se ubica la mano del paciente, mientras este módulo permanece sin movimiento. Esta característica representa una importante mejora en el confort y seguridad del paciente y del 5 fisioterapeuta. Si debe realizarse un determinado movimiento, la cadena cinemática del robot puede moverse independientemente, permitiendo evitar colisiones y situaciones incómodas para el fisioterapeuta. Por otra parte, el paciente no necesita cambiar su posición u orientación y es el brazo robot el que se adapta a la ubicación de la mano del paciente.
Preferentemente, la cadena cinemática del brazo robótico está constituida por al menos siete grados de libertad, de forma que el brazo robótico puede realizar todas las traslaciones y rotaciones dentro de su espacio de trabajo. Seis grados de libertad se utilizan para evolucionar dentro del espacio de trabajo, y el séptimo grado de libertad proporciona la redundancia de la región distal de la cadena cinemática. Naturalmente, la cadena cinemática puede disponer de más de siete grados de libertad, lo que proporciona una redundancia extra. Opcionalmente, ésta cadena 15 cinemática está formada por siete módulos, cada uno de los cuales tiene un grado de libertad rotacional respecto al anterior.
Preferentemente, el brazo robótico de esta invención comprende actuadores basados en músculos artificiales. Los actuadores basados en músculos artificiales poseen la importante ventaja de poder controlarse en fuerza, es decir, 20 se controla la fuerza que ejercen, no la posición que adoptan. Esto es una ventaja debido a la interacción hombre-máquina entre el brazo robótico y el brazo del paciente, las fuerzas y cargas observadas por el paciente son más importantes que la posición donde llegue el brazo del paciente. Los programas de entrenamiento basados en FNP comprenden generalmente ejercicios de movimientos libres activos, movimientos asistidos activos, movimientos resistivos activos y movimientos pasivos. Particularmente, en el caso de los movimientos resistivos activos, la 25 resistencia observada por el paciente es más fácilmente controlable mediante actuadores con control de fuerza. Naturalmente, una fuerza aplicada en un músculo artificial se traduce en su correspondiente movimiento del eslabón de la cadena cinemática.
Opcionalmente, estos músculos artificiales pueden ser músculos artificiales neumáticos. Los músculos neumáticos 30 son actuadores muy ligeros y con comportamiento lineal controlado mediante la presión: cuando una fuerza externa adicional actúa sobre el músculo, éste no incrementa su fuerza ejercida, sino modifica su posición. Alternativamente, otros músculos artificiales, como polímeros electroactivos, pueden ser utilizados como actuadores.
Preferentemente, estos actuadores basados en músculos artificiales se utilizan en una configuración 35 antagonista/agonista para el control de los movimientos de la articulación rotacional. La cadena cinemática está formada por un número de eslabones conectados mediante articulaciones. Para mover una articulación (y por tanto modificar la posición de los eslabones aguas debajo de la cadena cinemática) , se utilizan los músculos artificiales. Cuando se actúa sobre un músculo neumático, éste se contrae axialmente, y una fuerza se aplica a la carga conectada al músculo. El músculo artificial sólo puede ejercer fuerza en un sentido. Para lograr... [Seguir leyendo]
Reivindicaciones:
1. Un brazo robótico (100) para el control del movimiento del brazo de un usuario, que forma una cadena cinemática que se extiende desde un extremo proximal a un extremo distal y que comprende un soporte (190) para posicionar la mano del usuario en dicho extremo distal, caracterizado por el hecho de que dicha cadena cinemática 5 posee al menos una redundancia cinemática en una zona distal de forma que el movimiento de la mano del usuario puede ser desacoplado del movimiento de las otras partes de la cadena cinemática; y donde el soporte (190) para posicionar la mano del usuario comprende un mecanismo (192, 193) para la flexión y extensión de las falanges y pulgar del usuario.
2. Un brazo robótico de acuerdo a la reivindicación 1, caracterizado por el hecho de que su cadena cinemática posee al menos siete grados de libertad, de forma que el brazo robótico puede realizar todas las traslaciones y rotaciones en su espacio de trabajo.
3. Un brazo robótico de acuerdo a las reivindicaciones 1 y 2, caracterizado por el hecho de que su 15 cadena cinemática comprende siete módulos (110, 120, 130, 140, 150, 160, 170) , cada uno de los cuales es capaz de producir una rotación del siguiente módulo.
4. Un brazo robótico de acuerdo a la reivindicación anterior, caracterizado por el hecho de que dispone de actuadores basados en músculos artificiales (111, 112, 121, 122, 131, 132, 141, 142, 151, 152, 161, 162, 171, 172) . 20
5. Un brazo robótico de acuerdo a la reivindicación 4, caracterizado por el hecho de que dichos actuadores músculos artificiales son músculos neumáticos artificiales.
6. Un brazo robótico de acuerdo a las reivindicaciones 4 y 5, caracterizado por el hecho de que sus 25 actuadores músculos artificiales son utilizados en un esquema antagonista/agonista para controlar el movimiento de una articulación en ambos sentidos.
7. Un brazo robótico de acuerdo a la reivindicación anterior, caracterizado por el hecho de que incluye una pluralidad de sensores para medir las posiciones y cargas en el brazo robótico y un sistema para registrar y 30 almacenar los datos proporcionados por dichos sensores.
8. Un brazo robótico de acuerdo a la reivindicación 7, caracterizado por el hecho de que dispone de un sensor capaz de medir los pares en tres ejes ortogonales y las fuerzas en la dirección de esos ejes, en la interfaz hombre-máquina en el soporte (190) para la mano. 35
9. Un sistema (300) para la rehabilitación de miembros superiores que comprende un brazo robótico (100) según cualquier de las reivindicaciones anteriores y un segundo brazo robótico (200) para controlar el movimiento del codo del usuario.
10. Un sistema para rehabilitación de miembros superiores según la reivindicación 9 caracterizado por el hecho de que dispone además de un módulo de realidad virtual para realización de los ejercicios.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo de estiramiento de fascia plantar y tendón de aquiles, del 29 de Julio de 2020, de RODRÍGUEZ SANZ, David: 1. Dispositivo de estiramiento de la fascia plantar y el tendón de Aquiles caracterizado porque comprende una pieza semicircular como apoyo del pie con dos […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Aparato de terapia, del 8 de Julio de 2020, de Lime Medical GmbH: Aparato de terapia para realizar un movimiento continuo, pasivo y/o asistido activamente de los dedos y del pulgar de la mano de un paciente, que comprende: […]
Sistema electromédico automatizado y método de gestión relacionado, del 1 de Julio de 2020, de Lauro Group S.r.l: Sistema electromédico automatizado para tratar, curar, analizar y monitorizar una pluralidad de condiciones médicas relacionadas con la columna […]
DISPOSITIVO DE REHABILITACIÓN PARA LAS EXTREMIDADES INFERIORES, del 25 de Junio de 2020, de HOSPITAL SANT JOAN DE DEU: El dispositivo de rehabilitación para las extremidades inferiores comprende un suspensor para colocar un arnés para un usuario del dispositivo de rehabilitación […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]