Utilización de un sensor de imágenes y de un filtro de seguimiento de tiempo restante para evitar colisiones en vuelo.
Un sistema para evitar colisiones (5) para decidir si se debe realizar una maniobra de evitación autónoma con elfin de evitar una colisión en vuelo entre un vehículo aéreo anfitrión (1) equipado con el sistema (5) y un vehículoaéreo intruso,
comprendiendo el citado sistema ( 5):
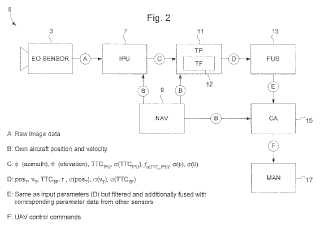
- al menos un sensor electro - óptico [EO] (3) dispuesto para capturar imágenes consecutivas del citadovehículo intruso, el vehículo que se manifiesta como un punto de objetivo en las citadas imágenes,
- un medio de tratamiento de imagen (7) dispuesto para la estimar al menos el ángulo de acimut [φ] y de elevación [θ] desde el vehículo anfitrión (1) al vehículo intruso en base a la posición en 2D del punto deobjetivo en la citadas imágenes, que se caracteriza porque el citado medio de tratamiento de imagen(7) está dispuesto, además, para calcular, usando la técnica de tratamiento de imagen de correlaciónde escala, una primera estimación de tiempo para colisión [TTCIPU] del tiempo para la colisión entre elvehículo anfitrión (1) y el vehículo intruso basado en el cambio de escala en el punto de objetivo entreal menos dos de la citadas imágenes consecutivas, y porque el citado sistema (5) comprende,además:
- un filtro de seguimiento (12) dispuesto para estimar una segunda estimación de tiempo para colisión[TTCTF ] del tiempo para la colisión entre el vehículo anfitrión (1) y el vehículo intruso usando el citadoángulo de azimut estimado [φ] , el citado ángulo de elevación estimado [θ] y la citada primera estimaciónde tiempo para colisión [TTCIPU] como parámetros de entrada y
- un medio (15) para evitar colisiones [CA] dispuesto para decidir si se debe realizar, o no, la maniobrade evitación basándose en cualquier de al menos un parámetro de decisión, de los cuales al menosuno es indicativo de la citada segunda estimación de tiempo para colisión [TTCTF ] .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08163084.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: MOLANDER,SÖREN, JONSSON,JIMMY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S5/16 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
PDF original: ES-2400708_T3.pdf
Fragmento de la descripción:
Utilización de un sensor de imágenes y de un filtro de seguimiento de tiempo restante para evitar colisiones en vuelo
Campo técnico
La presente invención se refiere al campo de evitar colisiones en vuelo, y más en particular, se refiere a un sistema y procedimiento para decidir si un vehículo aéreo debe realizar, o no, una maniobra autónoma de evitación con el fin de evitar la colisión con otro vehículo aéreo.
Técnica antecedente Con el fin de permitir que los vehículos aéreos no tripulados (UAV) viajen en el espacio aéreo civil no segregado, se deben resolver varios problemas técnicos. Una de las cuestiones más importantes es el problema de "detectar y evitar": un UAV debe ser capaz de detectar la presencia de otros vehículos aéreos y, si es necesario, realizar una maniobra autónoma y segura de último momento para evitar la colisión en vuelo. Por lo tanto, un UAV comprende típicamente un sistema para evitar colisiones en vuelo, a veces denominado también como sistema Detectar y Evitar, que incluye uno o varios sensores para la detección de aeronave intrusas, y una funcionalidad para evitar la colisión que utiliza los datos detectados y las características de rendimiento de la propia aeronave para realizar una maniobra de escape segura. Puesto que el sistema para evitar colisiones es un sistema de mejora de la seguridad, es crucial que los datos suministrados a la funcionalidad para evitar colisiones sean de alta calidad con el fin de evitar maniobras molestas e inseguras.
Un parámetro crucial en un sistema para evitar colisiones es la entidad denominada Tiempo para la Colisión (TTC) , que, como el nombre implica, es el tiempo estimado para el impacto con una aeronave intrusa, calculado en base a los datos relativos a la posición de la propia aeronave y al movimiento y los datos de los vehículos aéreos circundantes, recogidos por los sensores del sistema para evitar colisiones. El valor estimado del TTC se utiliza típicamente para determinar una entidad que a veces es denominada Tiempo Para Maniobrar (TTM) , que es una estimación del tiempo que queda antes de que se deba realizar una maniobra de escape con el fin de evitar de una manera segura una colisión en vuelo. El TTM se calcula normalmente como el TTC menos un valor de seguridad, determinándose el citado valor de seguridad en base a, por ejemplo, las características de funcionamiento de la propia aeronave y la incertidumbre asociada con la estimación del valor del TTC.
Hay varias maneras conocidas para estimar el tiempo para la colisión con aeronaves cercanas. Por ejemplo, se conoce el uso de cámaras para capturar imágenes consecutivas de aviones circundantes de tal manera que las aeronaves se representan como puntos de objetivo en las imágenes, y la estimación de TTC en base al cambio de escala en los puntos de objetivo de una imagen a otra.
También es bien conocido en la técnica el uso de diferentes tipos de filtros de seguimiento adaptados para estimar el tiempo para la colisión con una aeronave cercana a partir de una secuencia de observaciones con respecto a la posición de la aeronave cercana, adquiridas típicamente por medio de radar.
El documento norteamericano US 5128874 desvela un sistema que incorpora información del sensor inercial en cálculos de flujo óptico para detectar los obstáculos y para proporcionar rutas de navegación alternativas libres de obstáculos. Los cálculos de flujo óptico implican la extracción, derotación y adecuación de los puntos de interés a partir de fotogramas secuenciales de imágenes para la interpolación del alcance de la escena detectada.
El documento de Fasano, G. et al, "Seguimiento Multisensor en Vuelo para la Evitación Autónoma de Colisiones” Fusión de Información, 2006, ICIF '06, 9ª Conferencia Internacional, IEEE, PI, 1 de julio de 2006, páginas 1 -7, XP031042465 ISBN: 978–1– 4244 – 0953 -2, desvela los algoritmos de seguimiento desarrollados para un sistema multisensorial para evitar la colisión en Vehículos Aéreos No Tripulados. El sistema comprende un radar de impulsos, dos cámaras infrarrojas y dos cámaras visibles utilizadas como sensores de ayuda, y la técnica de fusión de datos adoptada para el seguimiento es el filtro de Kalman.
El documento de Recchia, G. et al: "Un Sistema de Ver y Evitar Electro – Óptico basado en Flujo Óptico para UAV”, Conferencia Aerospacial, 2007, IEEE, Piscataway, NJ, EE.UU., 3 de marzo de 2007, páginas 1 -9, XP031214311 ISBN: 978 – 1 – 4244 – 0524 -4, desvela un estudio de sistema de detección de objetivo autónomo electro -óptico completo para UAV. El algoritmo de detección seleccionado se basa en la técnica de Flujo Óptico y está probado en secuencias de vídeo reales de aeronaves en vuelo.
El documento norteamericano US 2007/210953 desvela sistema para detectar y evitar colisiones para un Vehículo Aéreo No Tripulado. El sistema incluye un interrogador de imágenes que identifica las amenazas potenciales de colisión de la aeronave y proporcionar las maniobras para evitar cualquier riesgo identificado. Sensores de formación de imágenes y / o de infrarrojos son utilizados para proporcionar marcos de imagen del entorno circundante y una unidad de detección de objetivos detecta los objetivos locales que se mueven en los marcos. Una unidad de evaluación de amenazas determina si cualquier objetivo local seguido representa una amenaza para la colisión y una unidad de maniobra de evitación proporciona el control de vuelo y la orientación con una maniobra para evitar cualquier riesgo de colisión identificado.
Sin embargo, cada uno de los principios anteriores para estimar el TTC adolece de inconvenientes. El primer principio de acuerdo con el cual las estimaciones de TTC se calculan en base al cambio de escala en los puntos de objetivo entre imágenes consecutivas sólo es aplicable cuando la aeronave intrusa está muy cerca de la aeronave propia. El segundo principio de acuerdo con el cual las estimaciones de TTC son estimadas por un filtro de seguimiento adolece del inconveniente de que la incertidumbre en las estimaciones de TTC es alta.
Sumario Un objeto de la presente invención es proporcionar un sistema para evitar colisiones, que es capaz de predecir el tiempo para la colisión (TTC) entre un vehículo aéreo equipado con el sistema y un vehículo aéreo intruso con un alto grado de certidumbre.
Otro objeto de la invención es proporcionar un sistema de este tipo que ofrezca una alta disponibilidad de estimaciones de TTC.
Este objeto se consigue de acuerdo con la invención por medio de un sistema para evitar colisiones para decidir si se debe realizar una maniobra autónoma de evitación con el fin de evitar una colisión en vuelo entre un vehículo aéreo anfitrión equipado con el sistema y un vehículo aéreo intruso. El sistema comprende:
-al menos un sensor electro óptico dispuesto para capturar imágenes consecutivas del citado vehículo intruso, manifestándose dicho vehículo como un punto de objetivo en las citadas imágenes,
-un medio de tratamiento de imagen dispuesto para estimar al menos el ángulo de acimut (φ) y de elevación (θ) del vehículo anfitrión con respecto al vehículo intruso en base a la posición en 2D del punto de objetivo en las citadas imágenes, y una primera estimación de tiempo para colisión (TTCIPU) , del tiempo para la colisión entre el vehículo anfitrión y el vehículo intruso en base al cambio de escala en el punto de objetivo entre al menos dos de las citadas imágenes consecutivas,
-un filtro de seguimiento dispuesto para estimar la segunda estimación de tiempo para colisión (TTCTF) del tiempo para la colisión entre el vehículo anfitrión y el vehículo intruso usando el citado ángulo de azimut estimado (φ) , el citado ángulo de elevación estimado (θ) y la citada primera estimación de tiempo para colisión (TTCIPU) como parámetros de entrada, y
-un medio para evitar colisiones (CA) dispuesto para decidir si se debe realizar, o no, la maniobra de evitación en base a cualquiera de al menos un parámetro, de los cuales al menos uno es indicativo de la citada segunda estimación de tiempo para colisión (TTCTF) .
Mediante el uso de las estimaciones de TTCIPU como parámetros de entrada para el filtro de seguimiento, la presente invención proporciona un sistema para evitar colisiones que se beneficia tanto de la ventaja ofrecida por filtros de seguimiento convencionales (estimaciones de TTC disponibles incluso cuando el objetivo está lejos) , así como de la ventaja ofrecida por los sensores de imagen convencionales que utilizan técnicas de correlación de escala (alto grado de certidumbre en las estimaciones... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para evitar colisiones (5) para decidir si se debe realizar una maniobra de evitación autónoma con el fin de evitar una colisión en vuelo entre un vehículo aéreo anfitrión (1) equipado con el sistema (5) y un vehículo aéreo intruso, comprendiendo el citado sistema ( 5) :
- al menos un sensor electro -óptico [EO] (3) dispuesto para capturar imágenes consecutivas del citado vehículo intruso, el vehículo que se manifiesta como un punto de objetivo en las citadas imágenes,
-un medio de tratamiento de imagen (7) dispuesto para la estimar al menos el ángulo de acimut [φ] y de elevación [θ] desde el vehículo anfitrión (1) al vehículo intruso en base a la posición en 2D del punto de objetivo en la citadas imágenes, que se caracteriza porque el citado medio de tratamiento de imagen
(7) está dispuesto, además, para calcular, usando la técnica de tratamiento de imagen de correlación de escala, una primera estimación de tiempo para colisión [TTCIPU] del tiempo para la colisión entre el vehículo anfitrión (1) y el vehículo intruso basado en el cambio de escala en el punto de objetivo entre al menos dos de la citadas imágenes consecutivas, y porque el citado sistema (5) comprende, además:
- un filtro de seguimiento (12) dispuesto para estimar una segunda estimación de tiempo para colisión [TTCTF ] del tiempo para la colisión entre el vehículo anfitrión (1) y el vehículo intruso usando el citado ángulo de azimut estimado [φ] , el citado ángulo de elevación estimado [θ] y la citada primera estimación de tiempo para colisión [TTCIPU] como parámetros de entrada y
-un medio (15) para evitar colisiones [CA] dispuesto para decidir si se debe realizar, o no, la maniobra 20 de evitación basándose en cualquier de al menos un parámetro de decisión, de los cuales al menos uno es indicativo de la citada segunda estimación de tiempo para colisión [TTCTF ] .
2. Un sistema para evitar colisiones (5) de acuerdo con la reivindicación 1, en el que el citado filtro de seguimiento (12) está dispuesto, además, para estimar la incertidumbre [σ (TTCTF) ] en la citada segunda estimación de tiem
po para colisión [TTCTF] , estando dispuesto el citado un medio de CA (15) para tomar la decisión en base a la 25 citada segunda estimación de tiempo para colisión [TTCTF] y la citada incertidumbre [σ (TTCTF) ].
3. Un sistema para evitar colisiones (5) de acuerdo con la reivindicación 1 o 2, en el que el citado medio de CA
(15) está dispuesto para tomar la decisión en base a uno o ambos de un parámetro indicativo de la citada segunda estimación de tiempo para colisión [TTCTF] y un parámetro indicativo de la citada primera estimación de tiempo para colisión [TTCIPU]
4. Un sistema para evitar colisiones (5) de acuerdo con la reivindicación 3 cuando depende de la reivindicación 2, que comprende, además, un medio (7) para determinar la incertidumbre [σ (TTCIPU) ] en la primera estimación de tiempo para colisión [TTCIPU] , estando dispuesto el citado un medio de CA (15) para tomar la decisión en base a cualquiera de la segunda estimación de tiempo para colisión [TTCTF], la incertidumbre de la segunda estimación de tiempo para colisión [σ (TTCTF ) ], la segunda estimación de tiempo para colisión [TTCIPU] , la incertidum
bre de la primera estimación de tiempo para colisión [σ (TTCIPU) ] , o cualquier combinación de éstos.
5. Un sistema para evitar colisiones (5) de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el citado filtro de seguimiento (12) está dispuesto para, en cada iteración del filtro, usar tanto la primera estimación de tiempo para colisión [TTCIPU] estimada por el medio de tratamiento de imagen (7) de la última imagen capturada y la segunda estimación de tiempo para colisión [TTCTF] estimada por el filtro (12) en la iteración pre
cedente del filtro como parámetros de entrada cuando se estima la citada segunda estimación de tiempo para colisión [TTCTF ].
6. Un sistema para evitar colisiones (5) de acuerdo con cualquiera de las reivindicaciones precedentes, que comprende un medio (7) para la determinación de la incertidumbre [σ (TTCIPU) ] en la primera estimación de tiempo para colisión [TTCIPU], y un medio (11) para determinar cuándo comenzar a usar la citada primera estimación de 45 tiempo para colisión [TTCIPU] como parámetro de entrada para el citado filtro de seguimiento (12) en base a la citada incertidumbre [σ (TTCIPU) ] .
7. Un sistema para evitar colisiones (5) de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el citado filtro de seguimiento 12, es un filtro de Kalman extendido [EKF]
8. Un sistema para evitar colisiones (5) de acuerdo con cualquiera de las reivindicaciones precedentes, en el que 50 el citado filtro de seguimiento 12, es un filtro de Kalman de tipo “unscented” [UKF].
9. Un sistema para evitar colisiones (5) de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el citado filtro de seguimiento 12 es un filtro de partículas.
10. Un procedimiento para decidir si se debe realizar una maniobra de evitación con el fin de evitar una colisión en vuelo entre un vehículo aéreo anfitrión (1) y un vehículo aéreo intruso, comprendiendo el citado procedimiento las etapas de:
-capturar imágenes consecutivas del citado vehículo intruso, el vehículo que se manifiesta como un 5 punto de objetivo en la citadas imágenes,
-estimar al menos los ángulos de acimut [φ] y de elevación [θ] del vehículo anfitrión (1) con respecto al vehículo intruso en base a la posición en 2D del punto de objetivo en las citadas imágenes,
el citado procedimiento se caracteriza porque comprende también las siguientes etapas:
-estimar, utilizando la técnica de tratamiento de imagen de correlación de escala, una primera estima
ción de tiempo para colisión [TTCIPU] del tiempo para la colisión entre el vehículo anfitrión (1) y el vehículo intruso en base al cambio de escala en el punto de objetivo entre al menos dos de las citadas imágenes consecutivas,
-estimar, por medio de un filtro de seguimiento (12) , una segunda estimación de tiempo para colisión [TTCTF] del tiempo para la colisión entre el vehículo anfitrión (1) y el vehículo intruso mediante el uso 15 del citado ángulo de azimut estimado [φ], del citado ángulo de elevación estimado [θ] y de la citada
primera estimación de tiempo para colisión [TTCIPU] como parámetros de entrada al citado filtro (12) , y
-decidir si se debe realizar, o no, la maniobra de evitación en base a cualquier de al menos un parámetro decisión, de los cuales al menos uno es indicativo de la citada segunda estimación de tiempo para colisión [TTCTF ].
11. Un procedimiento de acuerdo con la reivindicación 10, que comprende, además, la etapa de estimar la incertidumbre [σ (TTCTF ) ] en la citada segunda estimación de tiempo para colisión [TTCTF] , estando basada la etapa de decidir si se debe realizar, o no, la maniobra de evitación en la citada segunda estimación de tiempo para colisión [TTCTF ] y en la citada incertidumbre [σ (TTCTF ) ] .
12. Un procedimiento de acuerdo con la reivindicación 10 o 11, en el que la etapa de decidir si se debe realizar, o no, la maniobra de evitación está basada en uno o ambos de un parámetro indicativo de la citada segunda estimación de tiempo para colisión [TTCTF/IPU] y un parámetro indicativo de la citada primera estimación de tiempo para colisión [TTCIPU] .
13. Un procedimiento de acuerdo con la reivindicación 12 cuando depende de la reivindicación 11, que comprende, además, la etapa de estimar la incertidumbre [σ (TTCIPU) ] en la citada primera estimación de tiempo para colisión [TTCIPU], la etapa de decidir si se debe realizar, o no, la maniobra de evitación en base a cualquiera de la citada segunda estimación de tiempo para colisión [TTCTF], la incertidumbre de la citada segunda estimación de tiempo para colisión [σ (TTCTF ) ], la citada primera estimación de tiempo para colisión [TTCIPU], la incertidumbre de la citada primera estimación de tiempo para colisión [σ (TTCIPU) ] , o cualquier combinación de éstos.
14. Un procedimiento de acuerdo con cualquiera de las reivindicaciones 10 a 13, que comprende, además, la etapa estimar la incertidumbre [σ (TTCIPU) ] en la citada primera estimación de tiempo para colisión [TTCIPU], siendo usada la citada incertidumbre [σ (TTCIPU) ] como indicador de cuando empezar a utilizar la citada primera estimación de tiempo para colisión [TTCIPU] como parámetro de entrada al filtro de seguimiento (12) .
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]