Superposición virtual en 3D como ayuda de reducción para fracturas complejas.
(01/01/2020) Un programa informático para ayudar a un médico a realizar la reducción de fracturas complejas, comprendiendo el programa informático instrucciones que, cuando se ejecutan en una unidad de procesamiento de un dispositivo, hacen que el dispositivo ejecute las etapas de:
(S1) recibir una imagen radiográfica en 2D de un hueso fracturado que tiene una pluralidad de fragmentos óseos , siendo dicha imagen radiográfica en 2D capturada desde una primera dirección,
(S2) identificar, manualmente a través de medios de entrada o automáticamente, un aspecto estructural de al menos uno de los fragmentos óseos en la primera imagen radiográfica en 2D,
(S3) identificar un cuerpo de referencia mostrado en la imagen radiográfica en 2D, en el que el cuerpo de referencia está formado por una pluralidad de elementos…
Navegación en portal de entrada.
(14/08/2019) Un método para identificar un punto de entrada en un hueso para ayudar a la inserción de un clavo óseo , comprendiendo el método las etapas de:
- determinar un punto en una superficie ósea en una primera imagen generada desde una primera dirección mediante una unidad de imágenes ,
- realizar una primera simulación de la inserción de un clavo óseo basándose en el punto determinado , comprendiendo la primera simulación:
- identificar un eje de implante del hueso en la primera imagen, y
- alinear una visualización virtual del clavo óseo con el eje de implante , con respecto al punto determinado
caracterizado por que el método comprende además las etapas de:
- identificar…
Sistema y método de focalización quirúrgica.
(28/02/2019) Sistema de focalización que comprende
un dispositivo de focalización para posicionar un subdispositivo médico con respecto a un dispositivo médico,
un sistema de procesamiento de imágenes , y
una unidad de evaluación ,
en donde el dispositivo de focalización comprende:
una sección de acoplamiento del dispositivo de focalización para acoplar de manera única un dispositivo médico que tiene una sección de acoplamiento del dispositivo médico y un receptáculo del subdispositivo médico,
un cuerpo de referencia , y
una unidad de focalización ,
en donde el cuerpo de referencia se posiciona de manera reproducible con respecto a la sección de acoplamiento del dispositivo de focalización y se posiciona de manera reproducible con respecto a la unidad de focalización;
en…
Medición de la longitud de un tornillo de bloqueo.
Sección de la CIP Necesidades corrientes de la vida
(01/10/2018). Solicitante/s: Stryker European Holdings I, LLC. Clasificación: A61B34/00.
Un procedimiento para identificar la longitud del tornillo óseo a insertar a través de un orificio perforado en una dirección de perforación predeterminada en una posición predeterminada a través de un hueso , el procedimiento se caracteriza por comprender los siguientes pasos:
- identificar la dirección de perforación predeterminada de dicho tornillo óseo y la posición predeterminada en una primera imagen de rayos X del hueso, en la que la identificación de la posición predeterminada en el hueso incluye una medición de las distancias entre el orificio y la superficie externa de la imagen del hueso (i) en una dirección axial del hueso y (ii) en una dirección perpendicular a la dirección axial del hueso;
- transferir la dirección y la posición identificadas a un modelo óseo correspondiente; y
- determinar la longitud del tornillo óseo en base a la dirección y posición transferida en el modelo óseo.
PDF original: ES-2684140_T3.pdf
Sección de la CIP Necesidades corrientes de la vida
(26/09/2018). Solicitante/s: Stryker European Holdings I, LLC. Clasificación: A61B6/00, A61B17/56, A61B6/12, A61B6/04.
Un procedimiento para ayudar a ajustar un brazo en C en una dirección visual deseada,
comprendiendo el procedimiento las etapas de:
recibir una imagen de proyección 2D de una estructura anatómica desde un dispositivo de formación de imágenes basado en brazo en C , incluyendo la imagen de proyección 2D una visualización de un cuerpo de referencia que presenta una estructura que permite determinar una orientación 3D del cuerpo de referencia en función de la imagen de proyección 2D,
determinar la orientación 3D del cuerpo de referencia en función de la imagen de proyección 2D,
determinar un plano que tiene una orientación específica con respecto a la estructura anatómica en función de la orientación 3D del cuerpo de referencia, donde el cuerpo de referencia tiene una relación predeterminada con respecto a la estructura anatómica,
determinar un ángulo entre la dirección visual y dicha estructura anatómica.
PDF original: ES-2683370_T3.pdf
Determinación de la longitud del hueso.
(28/03/2018) Un dispositivo para medir la longitud real de un hueso fracturado en el que se introduce un implante, en el que se disponen un primer cuerpo de referencia y un segundo cuerpo de referencia en una relación predeterminada con respecto al implante. El dispositivo comprende
una unidad receptora para recibir una primera imagen fluoroscópica 2D que incluye el primer cuerpo de referencia y una primera característica ósea del hueso fracturado, la primera característica ósea que define un primer punto final del hueso, que recibe una segunda imagen fluoroscópica 2D que incluye el segundo cuerpo de referencia y una segunda característica ósea del hueso fracturado, la segunda característica ósea que define un segundo punto final (EP1) del hueso, el segundo punto final…
Determinación de la posición de rotación.
(12/07/2017) Un método para determinar una posición de rotación de una primera característica, de una primera sección ósea , con relación a una segunda característica de una segunda sección ósea , comprendiendo el método las etapas de:
determinar un eje longitudinal (X) de un hueso y determinar un plano (P), que se extienda perpendicular al eje longitudinal del hueso,
determinar un primer vector proyectado (V1p) en el plano (P), basándose en una primera dirección definida por una característica de la primera sección ósea ,
determinar un segundo vector proyectado (V2p) en el plano (P), basándose en una segunda dirección definida por una característica de la segunda sección ósea , en el que la segunda dirección se determina basándose en una imagen en 2D de la segunda sección ósea, en el que la…
Sistema de cirugía estereotáctica asistida por ordenador basada en una visualización tridimensional.
(03/08/2016) Sistema quirúrgico asistido por ordenador, que comprende:
un aparato para obtener imágenes de una zona de interés de una parte de la anatomía de un sujeto, comprendiendo el aparato un fluoroscopio ;
una memoria que contiene instrucciones ejecutables; y
un procesador programado mediante las instrucciones para:
recibir una fluorografía de la zona de interés y un implante posicionado en la zona de interés tomada en un primer ángulo con respecto al aparato, estando asociado el implante con un cuerpo de referencia ;
detectar la presencia del cuerpo de referencia en la fluorografía;
determinar una posición y dimensión espacial del implante en función de una identificación y registro del cuerpo de referencia;
superponer un implante virtual…
Sistema quirúrgico asistido por ordenador.
(15/10/2013) Sistema quirúrgico asistido por ordenador que comprende:
un cuerpo de referencia en relación con un fémur , representando el cuerpo de referencia de formavirtual una posición de un clavo intramedular y su tornillo óseo a aplicar al fémur como estructuraanatómica
un dispositivo detector que está adaptado para detectar una posición del cuerpo de referencia en relación con elfémur; detectar el cuerpo de referencia posicionado en relación con la estructura anatómica comprende tomar dosimágenes bidimensionales desde diferentes ángulos y generar una representación tridimensional en base a las dosimágenes bidimensionales, y determinar una posición espacial del cuerpo de referencia en relación con la estructuraanatómica en base a la representación…
Cirugía estereotáctica asistida por ordenador en base a visualización tridimensional.
(11/03/2013) Un procedimiento para poner en funcionamiento un sistema quirúrgico asistido por ordenador para cirugía estereotáctica, que comprende:
diagnosticar por imagen una región de interés y un dispositivo médico relacionado con un cuerpo de referencia próximo a la región de interés de una porción de una anatomía de un sujeto a dos o más ángulos para obtener una pluralidad de imágenes bidimensionales ;
procesar la pluralidad de imágenes bidimensionales para producir información tridimensional relacionada con la 10 región de interés;
asociar, en base a la información tridimensional, un dispositivo médico virtual con la región de interés en una relación predeterminada con respecto al cuerpo de referencia ; y
mostrar…
APARATO Y PROCEDIMIENTO PARA CALIBRAR UN ELEMENTO.
Sección de la CIP Necesidades corrientes de la vida
(16/07/2005). Ver ilustración. Solicitante/s: BRAINLAB AG. Clasificación: A61B19/00.
Procedimiento para determinar el recorrido espacial de un elemento que no presenta simetría de rotación , con lo que el elemento no simétrico rotativo está unido a un elemento de navegación (2, 2), se apoya por lo menos en dos posiciones diferentes sobre un dispositivo de calibración y apoyándose sobre este dispositivo de calibración se mueve, en cada una, de tal forma que el elemento se apoya por al menos un punto sobre el dispositivo de calibración.
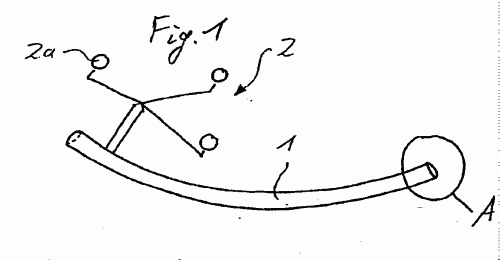
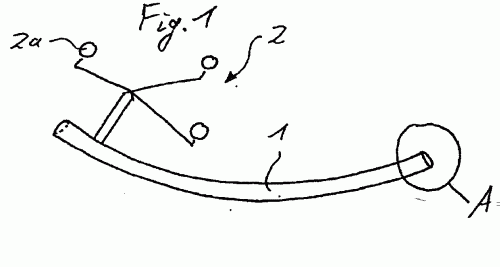
DISPOSITIVO PARA POSICIONAR UN ELEMENTO, POR EJEMPLO EN LA COLUMNA VERTEBRAL.
Sección de la CIP Necesidades corrientes de la vida
(16/07/2005). Ver ilustración. Solicitante/s: BRAINLAB AG. Clasificación: A61B17/88.
Dispositivo para la inserción invasiva mínima de un elemento en un cuerpo, con un manguito de guía rígido y un elemento de sujeción , que puede empalmarse a un elemento para insertarse en un cuerpo, presentando el manguito de guía una zona de guía para el guiado del elemento de sujeción y el dispositivo un elemento de navegación (2), pudiendo el elemento de navegación (2) estar unido al manguito de guía mediante el elemento desplazable (2b).
{kind=link}
{kind=link}