SISTEMA DE CONTROL DE VEHÍCULOS.
Sistema de control de vehículos.
Especialmente concebido para poder no solo desplazar de forma automática un vehículo,
ya sea agrícola, maquinaria de obras, de desactivación de explosivos, o de cualquier otro tipo, sino paralelamente poder controlar de forma automática la maquinaria asociada a dicho vehículo, sin necesidad de piloto, la invención centra sus características en el hecho que de incorpora un microprocesador (4), que está asociado a los circuitos de control del vehículo, así como a su maquinaria, contando con una memoria (11) en la que se preprograma la actuación sobre los distintos circuitos de control, para desplazamiento controlado y de forma automática del vehículo y de su maquinaria específica, de manera que el circuito compara la posición teórica del vehículo con la posición real del vehículo por medio de unos sensores (12) que detectan a una serie de balizas (13) implantadas estratégicamente sobre la superficie en la que debe operar el vehículo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230682.
Solicitante: SERRAT ALCAY, Jose.
Nacionalidad solicitante: España.
Inventor/es: SERRAT ALCAY,JOSE, SERRAT ALCAY,PEDRO, SERRAT ALCAY,RAUL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D6/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema de control de vehículos, en orden a que éstos puedan ser controlados sin necesidad de tener que disponer de una persona para su manejo en funciones de piloto.
El objeto de la invención es proporcionar un sistema de control de vehículos sumamente eficaz y preciso que permita un desplazamiento controlado del vehículo o vehículos con total seguridad y sin riesgo de accidentes.
La invención es aplicable, fundamentalmente, a vehículos de trabajo en obra, en agricultura, si bien podría aplicarse igualmente a otros ámbitos en los que la seguridad del conductor del vehículo pudiera peligrar, como es el caso de vehículos para la desactivación de campos de minas y similares.
ANTECEDENTES DE LA INVENCIÓN
Dentro del ámbito del control de vehículos, son conocidos múltiples sistemas, mediante los cuales se actúa, a través de un circuito de control sobre la dirección, sistema de frenado, así como sobre los medios de regulación de la velocidad del vehículo, de manera que dicho vehículo pueda ser controlado electrónicamente sin necesidad de piloto.
Este sistema, y de fonna experimental, a modo de ejemplo, se ha aplicado en el ámbito de la automoción, para pennitir desplazar a un vehículo a lo largo de una trayectoria preestablecida, de fonna totalmente automática.
El problema que presentan este tipo de sistemas es que el terreno por el que se mueve el vehículo suele ser mas irregular de lo que se pueda calcular de fonna virtual, por lo que la trayectoria real y la trayectoria virtual no se corresponden al 100%, lo que supone la generación de desviaciones, que podrían provocar accidentes, o simplemente que el vehículo no llegue finalmente al punto de llegada preestablecido.
Tratando de obviar esta problemática, éste tipo de sistemas se complementan con dispositivo de guiado vía GPS, mediante el cual se puede saber la posición exacta en todo momento del vehículo, y así pennitir corregir el posible desvío, en caso de que la posición real no se corresponda con la posición teórica.
El problema que presenta esta solución es que, la precisión del sistema GPS deja mucho que desear, con unos márgenes de error del orden de metros, que en algunas situaciones pueden llegar a provocar accidentes, a lo que hay que añadir el hecho de que la comunicación entre satélite y vehículo puede interrumpirse, por falta de cobertura de la antena del vehículo, situación que se produce con bastante frecuenc~f' con el consiguiente riesgo que ello supone.
DESCRIPCIÓN DE LA INVENCIÓN
El sistema de control de vehículos que la invención propone resuelve de fonna plenamente satisfactoria la problemática anterionnente expuesta, merced a una solución sencilla, pero de gran eficacia.
Para ello, y de fonna más concreta, y si bien el campo de aplicación de la invención es ligeramente distinto del anterionnente descrito, ya que la presente invención está destinada fundamentalmente a la aplicación en obras, agricultura, y otros ámbitos ya comentados, el sistema parte de la misma estructuración de control para el vehículo de que se trate, en lo que se refiere a los medios de accionamiento/control de sus medios de regulación de velocidad, dirección y sistema de frenado asociados a un circuito principal de control, con la particularidad de que, los medios de corrección de posibles desvíos con respecto a la trayectoria inicialmente preprogramada se materializan en una serie de balizas, asociadas a medios de detección de las mismas establecidas en el vehículo, y asociadas al microprocesador o circuito principal de control.
De esta fonna, el vehículo, a través de su itinerario preprogramado va desplazándose a través de dicha imaginaria ruta, de manera que a través de los citados medios de detección se identifican las distintas balizas distribuidas cada cierta distancia a lo largo del recorrido, pennitiendo comparar al circuito de control la posición teórica con la posición real, y corregir dicho posicionamientooy dirección, en caso de que éstas no coincidan.
Las balizas podrán materializarse en postes o señales, que serán .41:
identificadas a través de sensores ópticos, o bien estar enterradas, por ejemplo materializándose en elementos metálicos, en cuyo caso los medios de detección se materializarán en detectores de metales.
Obviamente el sistema de balizalniento podrá variarse de acuerdo con cualquier sistema convencional que disponga de medios de detección de dichas balizas, sin que ello afecte a la esencia de la invención.
Por último, cabe citar el hecho de que el circuito de control o microprocesador podrá estar asociado a sistemas de control de la maquinaria del veWculo, para que ésta se ponga a funcionar o se detenga llegados a un punto del recorrido del veWculo.
Se consigue de esta fonna, un sistema sumamente eficaz y seguro, en el que no existen riesgos de mal funcionamiento debido a que no depende de la cobertura de señales a larga distancia, pennitiendo no solo desplazarse al veWculo de fonna totalmente automática, sino llevar a cabo las labores asociadas a dicho veWculo, igualmente de fonna totahnente automatizada.
DESCRIPCIÓN DE LOS DIBUJOS
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en dond~ con carácter ilustrativo y no liInitativo, se ha representado lo siguiente:
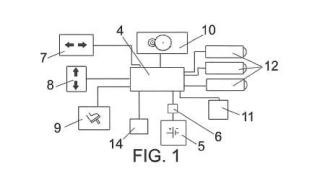
La figura 1. Muestra un diagrama de bloques de los elementos que participan en un sistema de control de veWculos realizado de acuerdo con el objeto de la presente invención.
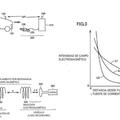
La figura 2. Muestra una vista en planta de un ejemplo de realización práctica de la invención, en la que el sistema de control se aplica a un tractor agrícola, para llevar a cabo las operaciones de preparación del terreno de un campo agrícola.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
En el ejemplo de aplicación práctica elegido mostrado en la figura 2, se ha elegido, de fonna meramente ejemplaria, la implantación del sistema de la invención en un tractor agrícola (1) destinado a preparar un terreno agrícola (2) a través de un apero de labranza (3) , si bien, el sistema de la invención es iguahnente aplicable a muchos otros ámbitos, tal y como se ha comentado con anterioridad.
Pues bien, de acuerdo ya con la esencia de la invención, en el seno del vehículo se establece un circuito principal de controlo microprocesador (4) , que se podrá alimentar a través de la propia batería (5) del vehículo, con el consiguiente regulador de tensión (6) , microcontrolador que está asociado a circuitos de control del vehículo, concretamente a un circuito de control de la dirección (7) , a un circuito de control del desplazamiento (8) , ya un circuito de control del sistema de frenado (9) , incluyendo además un circuito de •
control de la maquinaria (10) específica asociada al vehículo, en este caso, al sistema de elevación y descenso del apero de labranza (3) .
Pues bien, el microcontrolador (4) incorporará una memoria (11) asociada al mismo, en la que se preprogramará la actuación sobre los distintos circuitos de control, para desplazar el vehículo sobre la superficie del terreno agrícola (2) , así como para el control del apero de labranza (3) en las zonas que deba ser aplicado sobre el terreno.
De acuerdo con la esenCIa de la invención, en puntos estratégicamente distribuidos sobre el vehículo se establecerán una serie de sensores (12) , destinados a identificar la presencia de balizas (13) , convenientemente distribuidas sobre el terreno agrícola (2) .
La detección de éstas balizas permite al microcontrolador comparar la posición real del vehículo con la posición teórica del mismo, y en función de la misma, rectificar la trayectoria, para que éstas coincidan al 100%, de manera que una vez corregido el posible error de posición, el vehículo siga desplazándose de acuerdo con su rutina preprogramada, hasta la detección de la siguiente baliza.
Las citadas balizas podrán ser de muy diversa índole, de manera que a modo meramente ejemplario, podrían materializarse en señales o postes, o bien ser balizas subterráneas, convenientemente enterradas en el terreno, en función de las necesidades específicas de cada caso.
En cuanto a los sensores (12) , éstos podrían materializarse en sensores ópticos, en detectores de metales, o cualquier otro dispositivo capaz de detectar un elemento de balizado....
Reivindicaciones:
a._ Sistema de control de vehículos, ya sea vehículos agrícolas, maquinaria para obras u otras aplicaciones similares, que siendo del tipo de los que incorporan un circuito principal de controlo microprocesador (4) , que está asociado a circuitos de control del vehículo, tanto de su dirección, como de su desplazamiento y su sistema de frenado, contando con una memoria
(11) asociada al mismo, en la que se preprograma la actuación sobre los distintos circuitos de control, para desplazamiento controlado y de forma automática del vehículo, habiéndose previsto que dicho circuito cuente con medios de comparación de la posición teórica con la posición real del vehículo, caracterizado porque los medios de obtención de la posición real del vehículo se materializan en una serie de sensores (12) establecidos estratégicamente sobre el vehículo, y asociados al circuito de control principal
2a._ Sistema de control de vehículos, según reivindicación la, caracterizado porque los sensores (12) se materializan en sensores ópticos, mientras que las.balizas (13) se materializan en postes o señales implantados sobre el terreno.
3a._ Sistema de control de vehículos, según reivindicación la, caracterizado porque las balizas (13) se materializan en elementos metálicos convenientemente enterrados en el terreno, mientras que los sensores (12) se materializan en detectores de metales.
o o o o o o o o o o FIG.2
Patentes similares o relacionadas:
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Procedimiento para el control de la dirección y el comportamiento de un vehículo, del 13 de Noviembre de 2019, de Sentient IP AB: Un procedimiento para controlar un accionador de par de torsión de retroalimentación y al menos un accionador de guiñada y/o del estado lateral del vehículo, tal como […]
 Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Sistema de modificación de la relación de dirección para vehículo con brazo telescópico y vehículo correspondiente, del 3 de Julio de 2019, de MANITOU BF: Sistema de modificación de la relación de dirección para un vehículo con brazo telescópico inclinable, comprendiendo el vehículo ruedas directrices […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Máquina automóvil con instalación de carga, del 8 de Mayo de 2019, de Wacker Neuson Linz GmbH: Máquina automóvil con una instalación de carga , un accionamiento de rodadura y un tren de rodadura , tal como una cargadora de ruedas, una cargadora telescópica o similares, […]
Procedimiento de estabilización de conducción, dispositivo de estabilización de conducción y vehículo equipado con dicho dispositivo, del 6 de Mayo de 2019, de WABCO GMBH: Procedimiento de estabilización de conducción en el que, para la estabilización de un vehículo , especialmente de un vehículo industrial, se cambia un ángulo […]
Sistema de guiado de vehículo, del 11 de Diciembre de 2018, de Topcon Precision Agriculture Pty Ltd: Una combinación de sistema de guiado de vehículo y mecanismo de volante para un vehículo, con el vehículo incluyendo un mecanismo de volante que incluye un volante […]