Sistema de causar baja de forma segura un UAV.
Un sistema (1; 1A; 1B) de causar baja a distancia de un vehículo (5) no tripulado conectado de manera comunicativa con una estación (3) de control de un vehículo no tripulado a través de una interfaz (9) aérea,
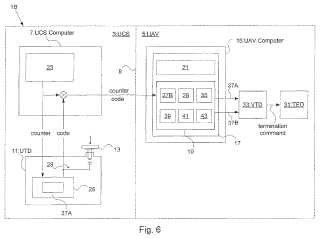
dicho sistema de causar baja comprende una porción de estación de control situada en dicha estación (3) de control y una porción de vehículo situada en dicho vehículo (5) no tripulado, comprendiendo la porción de la estación (3) de control del sistema de causar baja:
- una computadora (7) de la estación de control que comprende un medio (23) adaptado para generar,sobre una base cíclica unos valores de contador diferentes;
- un dispositivo (11) de causar baja adaptado para generar, en cada ciclo, un código de estación de control[código de CS ] utilizando un valor de control por medio de un algoritmo (27A) de causar baja;
- un medio de transmisión adaptado para transmitir, en cada ciclo, el valor de contador y el código de CS generado desde ese valor de contador hasta el vehículo (5) no tripulado bajo la forma de un par valor de contador / código de CS , por medio de dicha interfaz (9) aérea; y
- un accionador (13) de causar baja el cual, cuando es accionado, está adaptado para impedir que los pares de valor de contador / código de CS en los cuales el código de CS ha sido generado a partir del valor de contador sean transmitidos hasta el vehículo (5) no tripulado,mientras que la porción de vehículo del sistema de causar baja comprende:
- un medio de recepción adaptado para recibir el par valor de contador / código de CS transmitido desde la etapa (3) de control en cada ciclo; y
- una computadora (15) del vehículo no tripulado conectada a dicho medio de recepción y adaptada para:generar un código del vehículo no tripulado [código de UV] mediante la ejecución del valor de contador en el par valor de contador / código de CS por medio de un algoritmo (27B) de causar baja correspondiente al algoritmo (27A) utilizado para generar el código de CS en la estación (3)de control, y
comparar el código de CS existente en el par valor de contador / código de CS recibido con dicho código de UV generado para establecer que son diferentes entre sí, en cuyo caso se ha producido un episodio de causar baja del tipo de episodio de causar baja de código, y
- un medio (15; 15, 33) de decisión de causar baja para que cause baja el vehículo (5) no tripulado en base a la aparición de cualquier episodio de causar baja, en el que el medio de decisión de causar baja está, así mismo, adaptado para que cause baja el vehículo no tripulado si ningún par valor de contador /código de CS ha sido recibido por el medio de recepción en uno o en una pluralidad de ciclos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08162084.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: JOHANSSON, RIKARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
PDF original: ES-2416707_T3.pdf
Fragmento de la descripción:
Sistema de causar baja de forma segura un UAV
Campo técnico
La presente invención se refiere al campo de los vehículos no tripulados, como por ejemplo los vehículos aéreos no 5 tripulados (UAV) y, más concretamente, a un procedimiento y a un sistema para hacer posible que un vehículo no tripulado cause baja de una manera segura y rentable.
Antecedentes técnicos Los vehículos aéreos no tripulados (UAV) a menudo están condicionados a operar en un espacio aéreo vacío donde no existe el riesgo de colisiones en pleno aire con aeronaves tripuladas, y en áreas geográficas en las que un posible aterrizaje violento no provoque ningún tipo de lesiones a las personas y ocasione daños mínimos infraestructurales y medioambientales. Las restricciones del área operativa se establecen normalmente mediante requisitos, reglamentaciones y leyes fronterizas, gubernamentales o internacionales.
Cuando un UAV sale de o está a punto de salirse de su área operativa permitida debido a un funcionamiento incorrecto de los sistemas, o tras la detección de unas condiciones carentes de seguridad dentro del área operativa permitida, es de gran importancia que el UAV pueda ser dado de baja a distancia, por ejemplo, mediante el apagado del motor del UAV. Aunque opera más o menos de forma autónoma, un UAV está típicamente conectado a una estación de control del UAV (UCS) desde la cual un operador puede causar baja a distancia del UAV mediante la anulación de su sistema de control autónomo.
Los requisitos de su sistema de causar baja que permiten que un operador cause baja a distancia un UAV son rigurosos. El sistema de causar la baja debe estar diseñado para evitar que se cause la baja del UAV sin una causa pertinente pero, lo que reviste máxima importancia, es que debe ser extremadamente fiable, de tal manera que la baja del UAV sea siempre posible cuando surja la necesidad.
Así mismo, es importante reducir al mínimo el peso y el tamaño de los componentes que constituyen el sistema para causar baja. Ello es particularmente importante por lo que se refiere a la parte del sistema de detección que está
situado en el UAV dado que un incremento del tamaño y del peso del UAV típicamente incrementa el peso del combustible y / o deteriora la capacidad de vuelo del UAV. Así mismo, es de gran importancia que el sistema de causar baja esté equipado para soportar tomas de control hostiles para impedir que terceras partes transmitan comandos que provoquen que el UAV con fines dolosos.
Los sistemas para causar baja convencionales se conocen a partir de los documentos FR 2 912 022 y EP 1 462 898
A2. Así mismo, un controlador a distancia convencional que transmite información codificada y no codificada se conoce a partir del documento US 2007/0279184 A1 mientras que un sistema antirrobo convencional que emite señales de acción residual se conoce a partir del documento US 2002/0163418 A1.
Sumario Constituye un objetivo de la presente invención proporcionar un sistema para causar baja que permita que un 35 vehículo no tripulado cause baja a distancia de una manera segura y rentable.
Este objetivo se consigue mediante un sistema para causar baja mediante un sistema para causar baja a distancia de un vehículo no tripulado conectado de forma comunicativa con una estación de control del vehículo no tripulado a través de una interfaz aérea. El sistema para causar baja comprende dos partes; una porción de estación de control que está situada en la estación de control y una porción de vehículo que está situada en el vehículo no tripulado. La porción de la estación de control del sistema para causar baja comprende:
-una computadora de la estación de control que comprende un medio adaptado para generar, de forma cíclica diferentes valores de contador;
-un dispositivo de causar baja adaptado para generar, en cada ciclo, un código de estación de control [código de CS ] mediante la ejecución de un valor de contador por medio de un algoritmo de causar baja;
-un medio de transmisión adaptado para transmitir, en cada ciclo, el valor de contador y el código de CS generado desde ese valor de contador hasta el vehículo no tripulado bajo la forma de un par valor de contador / código de CS por medio de dicha interfaz aérea; y
-un accionador para causar baja el cual, cuando es accionado, está adaptado para impedir que los pares valor de contador / código de CS los cuales el código de CS ha sido generado a partir del valor de contador sean 50 transmitidos hasta el vehículo no tripulado, mientras que la porción del vehículo del sistema para causar baja
comprende:
-un medio de recepción adaptado para recibir el par valor de contador / código de CS transmitido desde la estación de control en cada ciclo;
-una computadora del vehículo no tripulado conectada a dicho medio de recepción y adaptada para:
generar un código de vehículo no tripulado [código UV] mediante la ejecución del valor de contador del 5 par valor de contador / código de CS recibido mediante un algoritmo de causar baja correspondiente al algoritmo utilizado para generar el código de CS en la estación de control, y
comparar el código de CS del par valor de contador / código de CS recibido con dicho código UV generado para establecer si difieren entre sí, en cuyo caso se ha producido un episodio de causar baja del tipo del episodio de causar baja de código, y
- un medio de decisión de causar bajar para decidir si causar baja del vehículo no tripulado en base a la aparición de cualquier episodio de causar baja, en el que el medio de decisión de causar baja está adaptado para efectuar la causar baja del vehículo no tripulado si no ha sido recibido ningún par valor de contador / código de CS por el medio de recepción en uno o en una pluralidad de ciclos consecutivos.
La presente invención, por tanto, proporciona un sistema para causar baja en base al principio de transmitir, sobre una base cíclica, desde una estación de control hasta un vehículo no tripulado, unos pares de valores de código y de contador dependientes entre sí cuya dependencia se determina por un algoritmo de causar baja. El vehículo tiene conocimiento del algoritmo y puede, por tanto, revalidar un par código / contador recibido utilizando el mismo algoritmo. Si el par código / contador recibido es inválido, el vehículo puede decidir causarse baja de forma autónoma. El accionador para causar baja hace posible que el vehículo cause baja de manera segura a partir de la estación de control mediante invalidación, cuando es accionado por un operador, de los pares código / contador que son transmitidos al vehículo.
La transmisión de los pares código / contador válidos pueden, por tanto, ser considerados como comandos de transmisión de no causar baja hasta el vehículo no tripulado, dando instrucciones al vehículo para que no cause baja de forma autónoma.
Una ventaja causar baja del vehículo no tripulado mediante la evitación de comandos de no causar baja que sean transmitidos al vehículo por oposición a la transmisión de manera activa de un comando de causar baja que instruya al vehículo para que cause baja de forma autónoma, consiste en que el vehículo no tripulado causará baja, de forma autónoma, así mismo, en el supuesto de que sea transmitida una función incorrecta de la estación de control que impida la señal transmitida al vehículo. De esta manera, un funcionamiento incorrecto de la estación de control no supondrá una situación en la cual el vehículo no tripulado no pueda ser objeto de causar baja, haciendo posible potencialmente que el vehículo escape de su área operativa permitida. Ello es ventajoso en el sentido de que un escenario en el que un vehículo no tripulado escape de su área operativa no permitida es mucho peor, desde el punto de vista de la seguridad, que un escenario en el que un vehículo no tripulado cause baja dentro de su área operativa permitida.
Una ventaja de la utilización de comandos de no causar baja en la forma de unos valores de código y contador dependientes entre sí es que es altamente improbable que la estación de control, debido a un fallo del software o del hardware será capaz de impedir que el vehículo cause baja mediante el envío de manera inadvertida de los pares de contador / código válidos hasta el vehículo.
De modo preferente, la computadora del vehículo no tripulado está, así mismo, adaptada para almacenar, al menos de forma temporal, cualquier parámetro entre el parámetro valor de contador, el parámetro código de CS o el parámetro código de UV, y para comparar cualquiera de dichos parámetros con al menos un parámetro de dicho tipo,... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (1; 1A; 1B) de causar baja a distancia de un vehículo (5) no tripulado conectado de manera comunicativa con una estación (3) de control de un vehículo no tripulado a través de una interfaz (9) aérea, dicho sistema de causar baja comprende una porción de estación de control situada en dicha estación (3) de control y una porción de vehículo situada en dicho vehículo (5) no tripulado, comprendiendo la porción de la estación (3) de control del sistema de causar baja:
-una computadora (7) de la estación de control que comprende un medio (23) adaptado para generar, sobre una base cíclica unos valores de contador diferentes;
-un dispositivo (11) de causar baja adaptado para generar, en cada ciclo, un código de estación de control 10 [código de CS ] utilizando un valor de control por medio de un algoritmo (27A) de causar baja;
-un medio de transmisión adaptado para transmitir, en cada ciclo, el valor de contador y el código de CS generado desde ese valor de contador hasta el vehículo (5) no tripulado bajo la forma de un par valor de contador / código de CS , por medio de dicha interfaz (9) aérea; y
-un accionador (13) de causar baja el cual, cuando es accionado, está adaptado para impedir que los pares 15 de valor de contador / código de CS en los cuales el código de CS ha sido generado a partir del valor de contador sean transmitidos hasta el vehículo (5) no tripulado,
mientras que la porción de vehículo del sistema de causar baja comprende:
-un medio de recepción adaptado para recibir el par valor de contador / código de CS transmitido desde la etapa (3) de control en cada ciclo; y
- una computadora (15) del vehículo no tripulado conectada a dicho medio de recepción y adaptada para:
generar un código del vehículo no tripulado [código de UV] mediante la ejecución del valor de contador en el par valor de contador / código de CS por medio de un algoritmo (27B) de causar baja correspondiente al algoritmo (27A) utilizado para generar el código de CS en la estación (3) de control, y
comparar el código de CS existente en el par valor de contador / código de CS recibido con dicho código de UV generado para establecer que son diferentes entre sí, en cuyo caso se ha producido un episodio de causar baja del tipo de episodio de causar baja de código, y
-un medio (15; 15, 33) de decisión de causar baja para que cause baja el vehículo (5) no tripulado en base a la aparición de cualquier episodio de causar baja, en el que el medio de decisión de causar baja 30 está, así mismo, adaptado para que cause baja el vehículo no tripulado si ningún par valor de contador / código de CS ha sido recibido por el medio de recepción en uno o en una pluralidad de ciclos.
2. Un sistema (1; 1A; 1B) de causar baja de acuerdo con la reivindicación 1, en el que el dispositivo (11) de causar baja es una unidad autónoma conectada exteriormente con la computadora (7) de la estación de control, estando dicho dispositivo de causar baja adaptado para recibir los valores de contador procedentes de la computadora de la 35 estación de control, ejecutarlos por medio de algoritmo (27A) de causar baja, y devolver un código de CS para cada valor de contador a la computadora de la estación de control, estando dicho accionador (13) de causar baja adaptado para, cuando es accionado, desconectar el dispositivo (11) de causar baja de la computadora (7) de la estación de control, de tal manera que los valores de contador no pueden ser recibidos por el dispositivo (11) de causar baja y / o los códigos de CS no puedan ser devueltos a la computadora (7) de la estación de control del
dispositivo (11) de causar baja, impidiendo con ello que los pares valor de contador / código de CS los cuales el código de CS ha sido generado a partir del valor de contador sean transmitidos al vehículo (5) no tripulado.
3. Un sistema (1; 1A; 1B) de causar baja de acuerdo con las reivindicaciones 1 o 2, en el que la computadora (15) del vehículo no tripulado está así mismo adaptada para, en cada ciclo:
almacenar, al menos de manera temporal, cualquiera de los parámetros entre el parámetro de valor de 45 contador, el parámetro de código de CS, o el parámetro de código de CS, o el parámetro de código de UV; y
comparar cualquiera de dichos parámetros con al menos un parámetro del mismo tipo, almacenado durante al menos un ciclo anterior, para ver si el parámetro permanece sin modificar entre los ciclos, en cuyo caso se ha producido un episodio de causar baja del episodio de causar baja del parámetro constante.
4. Un sistema (1; 1A; 1B) de causar baja de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la porción de vehículo del sistema para causar baja comprende así mismo un dispositivo para causar baja del [VTD]
(33) que está exteriormente conectado con la computadora (15) del vehículo no tripulado, estando así mismo dicha computadora (15) del vehículo no tripulado adaptada para, en cada ciclo en el cual se ha producido el episodio de causar baja:
generar un comando de no causar baja bajo la forma de una o varias señales que presenten unas características predeterminadas o que incorporen un contenido de información predeterminado, 5 características o contenido de información que sean complejos con el fin de conseguir que sea improbable que un proceso aleatorio en la computadora (15) del UAV genere dicha señal o señales por casualidad, y
transmitir dicha (s) señal (es) hacia dicho UVT (33) ,
estando, a su vez, el VTD (33) adaptado para, en cada ciclo:
establecer si ha recibido o no la (s) señal (es) procedente (s) de la computadora (15) del vehículo no tripulado que presente dichas características predeterminadas o incorpore dicho contenido de información predeterminado, en cuyo caso se ha producido un episodio de causar baja del tipo del episodio de causar baja de la prueba de la TF.
5. Un sistema (1; 1A; 1B) de causar baja de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la secuencia de cualquiera de las acciones a realizar por la computadora (15) del vehículo no tripulado se lleva a cabo mediante la ejecución de una función (19) de causar baja, incluyendo dicha función (19) de causar baja:
una función (39) de evitación de las interrupciones, adaptada para establecer la responsabilidad del procesador (17) de la computadora para la ejecución de la función (19) de causar baja en un modo en el que ignora las solicitudes de interrupción entrantes procedentes de otro software / hardware mientras se ejecuta la función (19) de causar baja;
una función (41) de control de ejecución completa adaptada para detectar si la entrada en la función (19) de causar baja no ha sido llevada a cabo a través del punto de entrada correcto, en cuyo caso se ha producido un episodio de causar baja del tipo del episodio de causar baja de entrada de la TF, y
una función (43) de integridad de los datos adaptada para detectar si los datos procesados por la función (19) de causar baja ha sido modificada de manera inadvertida por cualquier otro proceso en la computadora (15) del UAV, en cuyo caso un episodio de causar baja del tipo del episodio de causar baja de mistificación de los datos se ha producido.
6. Un sistema (1; 1A; 1B) de causar baja de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicho medio (15; 15, 33) de decisión de causar baja está adaptado para determinar el número de ciclos consecutivos en los cuales cualquier tipo de episodio de causar baja se ha producido y, si dicho número excede un valor de umbral predeterminado, dar instrucciones a un dispositivo [TED] (31) de ejecución de causar baja del vehículo (5) no tripulado para que el vehículo cause baja, por ejemplo, apagando el encendido del vehículo (5) o deteniendo el suministro de combustible hacia el motor del vehículo.
7. Una estación (3) de control de un vehículo no tripulado a partir de la cual se puede causar baja a distancia de un vehículo (5) no tripulado conectado de manera comunicativa con dicha estación (3) de control a través de una interfaz (9) aérea, comprendiendo dicha estación (3) de control:
-una computadora (7) de la estación de control que comprende un medio (23) adaptado para generar, de forma cíclica, diferentes valores de contador;
-un dispositivo (11) de causar baja adaptado para generar, en cada ciclo, un código de estación de control [código de CS] mediante la ejecución de un valor de contador por medio de un algoritmo (27A) de causar
baja;
-un medio de transmisión adaptado para transmitir, en cada ciclo, el valor de contador y el código de CS generado desde ese valor de contador hasta el vehículo (5) no tripulado bajo la forma de un par valor de contador / código de CS, por medio de dicha interfaz (9) aérea, y
-un accionador (13) de causar baja el cual, cuando es accionado, está adaptado para impedir que los pares
valor de contador / código de CS en los cuales el código de CS ha sido generado a partir del valor de contador sean transmitidos hasta el vehículo (5) no tripulado,
en la que el vehículo no tripulado está adaptado para causar baja de forma autónoma si ningún par valor de contador / código de CS válido es recibido en uno o en una pluralidad de ciclos consecutivos, y la transmisión cíclica de los pares valor de contador / código de CS por la estación (3) de control sirve como 50 transmisión de comandos de no causar baja hacia el vehículo no tripulado, dando instrucciones al vehículo no tripulado para que cause baja por sí mismo.
8. Un vehículo (5) no tripulado conectado de manera comunicativa con una estación (3) de control del vehículo no tripulado por medio de una interfaz (9) aérea a partir de la cual se puede causar baja a distancia del vehículo, comprendiendo dicho vehículo (5) no tripulado:
-un medio de recepción adaptado para recibir unos valores de contador y unos códigos de estación de
control [códigos CS] transmitidos de manera cíclica bajo la forma de pares valor de contador / código de CS a partir de dicha estación (3) de control, siendo el código de CS de cada par generado mediante la ejecución del valor de contador en ese par a través de un algoritmo (27A) de causar baja; y
-una computadora (15) de un vehículo no tripulado conectada a dicho medio de recepción y conectada para, en cada ciclo:
generar un código de vehículo no tripulado [código de UV] mediante la ejecución del valor de contador por medio de un algoritmo (27B) de causar baja correspondiente al algoritmo (27A) de causar baja a través del cual el valor de contador fue ejecutado para generar el código de CS ;
comparar dicho código de CS con dicho código de UV generado para establecer si difieren entre sí, en cuyo caso se ha producido un episodio de causar baja del tipo de episodio de causar baja de código, y
-un medio (15; 15, 33) de decisión de causar baja para decidir si causar la baja o no del vehículo (5) no tripulado en base a la aparición de cualquier episodio de causar baja, en el que el medio de decisión de causar baja está así mismo adaptado para causar la baja del vehículo no tripulado si ningún par valor de contador / código de CS ha sido recibido por el medio de recepción en uno o en una pluralidad de ciclos
consecutivos.
9. Un procedimiento de causar baja a distancia de un vehículo (5) no tripulado que está conectado de manera comunicativa con una estación (3) de control de vehículo por medio de una interfaz (9) aérea, incluyendo el procedimiento la generación de un código y de unos valores de contador dependientes entre sí mediante la realización, de forma cíclica, de las siguientes etapas en la estación de control:
-la generación (S1) de un valor de contador;
-la generación (S2) de un código de estación de control [código de CS] mediante la ejecución de dicho valor de contador por medio de un algoritmo (27A) de causar baja; y
-la transmisión (S3) , a través de la interfaz (9) aérea, de dicho valor de contador y de dicho código de CS hasta el vehículo (5) no tripulado;
y la realización, en cada ciclo, de las siguientes etapas, en el vehículo (5) no tripulado:
-la recepción de dicho valor de contador y de dicho código de CS;
-la generación (S4; S73) de un código de vehículo no tripulado [código de UV] mediante la ejecución de dicho valor de contador recibido por medio de un algoritmo (27B) de causar baja correspondiente del algoritmo (27A) de causar baja utilizado para generar el código de CS en la estación de control;
-la comparación (S5; S74) de dicho código de CS recibido con dicho código de UV generado para establecer (S6; S75) si difieren entre sí, en cuyo caso, se ha producido un episodio de causar baja del tipo de causar baja de código;
-la decisión (S7 -S9; S81 -S83) acerca de si causar baja o no al vehículo (5) no tripulado en base a la aparición de cualquier episodio de causar baja,
y comprendiendo, así mismo, la etapa de causar baja el vehículo no tripulado si no se ha recibido ningún par valor de contador / código de CS en el vehículo (5) no tripulado en uno o una pluralidad de ciclos consecutivos.
10. Un procedimiento de acuerdo con la reivindicación 9, en el que el procedimiento incluye así mismo la realización, para cada ciclo de las siguientes etapas en el vehículo (5) no tripulado:
-el almacenamiento, al menos de manera temporal, de cualquier parámetro entre el parámetro de valor de 45 contador, el parámetro de código de CS o el parámetro de código UV;
-la comparación de cualquiera de dichos parámetros con al menos un parámetro del mismo tipo, almacenado durante al menos un ciclo previo, para establecer (S6A; S76) si no difieren entre sí, en cuyo caso, se ha producido un episodio del tipo del episodio de causar baja de un parámetro constante.
11. Un procedimiento de acuerdo con las reivindicaciones 9 o 10, en el que todas las etapas llevadas a cabo en el 50 vehículo (5) no tripulado con excepción de la etapa de decisión se llevan a cabo en una computadora (15) del vehículo no tripulado, y en el que el procedimiento incluye así mismo, la realización, para cada ciclo en el que se ha producido el episodio de no causar baja, la etapa siguiente en dicha computadora (15) :
-la generación (S6B; S79) de un comando de no causar baja bajo la forma de una o varias señales que presentan unas características predeterminadas, características o contenido de información que son 5 complejas con el fin de hacer improbable que un proceso aleatorio en la computadora (15) del UAV genere dicha señal o señales por casualidad;
-la transmisión de dicha (s) señal (es) a un dispositivo de causar baja de un vehículo [VTD] (33) conectado exteriormente a la computadora (15) del vehículo no tripulado,
el procedimiento incluye así mismo, la realización, para cada ciclo, de la siguiente etapa en dicho VTD (33) ;
-el establecimiento (S6C; S80) de si dicho VTD (33) no ha recibido la (s) señal (es) procedentes de la computadora (15) del vehículo no tripulado que presenta dichas características predeterminadas o que incorpora dicho contenido de información predeterminado, en cuyo caso se ha producido un episodio de causar baja del tipo de episodio de causar baja de prueba de la TF.
12. Un procedimiento de acuerdo con cualquiera de las reivindicaciones 9 a 11, en el que el procedimiento incluye 15 la etapa de:
-si es accionado un accionador (13) de causar baja activado de manera manual en la estación (3) de control, la evitación de que los pares valor de contador / código de CS los cuales el código de CS ha sido generado a partir del valor de contador sean transmitidos hasta el vehículo (5) no tripulado, ocasionando con ello de manera intencionada que se produzcan uno o varios episodios de causar baja.
13. Un procedimiento de acuerdo con cualquiera de las reivindicaciones 9 a 12, en el que la etapa de decidir (S8; S82) si causar baja o no el vehículo (5) no tripulado en base a la aparición de cualquier episodio de causar baja implica las etapas de:
-la determinación del número de ciclos consecutivos en los cuales se ha producido cualquier episodio de causar baja; y
-la decisión de causar baja (S9; S83) del vehículo (5) no tripulado si dicho número excede un valor de umbral predeterminado.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
DISPOSICIÓN DE MANDO, del 30 de Junio de 2020, de SEAT, S.A.: Una disposición de mando de un vehículo autónomo que modifica o ajusta una funcionalidad de conducción de un modo de conducción autónomo del […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, del 17 de Junio de 2020, de THALES: Un procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, el procedimiento comprende las siguientes etapas: - a) el suministro […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
UNIDAD CENTRAL DE VEHÍCULO, del 2 de Junio de 2020, de SEAT, S.A.: Una unidad central de un vehículo comprende un procesador y un cámara de adquisición de imágenes , donde las imágenes adquiridas […]
Método para controlar el tiempo de llegada de una aeronave, del 27 de Mayo de 2020, de THE BOEING COMPANY: Un método para controlar la llegada de una aeronave a un punto de referencia objetivo, comprendiendo (a) definir un tiempo requerido de llegada (RTA) en ese punto de referencia […]