ROBOT PARA LIMPIAR PISCINAS.
Robot para limpiar piscinas, que comprende medios motrices, que pueden transmitir su movimiento a medios de desplazamiento,
donde los medios de desplazamiento comprenden dos ruedas (2) dispuestas en línea en cada lateral (3, 4) del robot, teniendo el robot dos laterales (3, 4), consistiendo los medios motrices consisten en una unidad motriz (5) que está operativamente conectada con dos ruedas (2) situadas en un primer lateral (3) del robot, comprendiendo al menos un eje de transmisión (6) que permite transmitir el movimiento proveniente de la unidad motriz (5) desde dicho primer lateral (3) a las ruedas (2) situadas en un segundo lateral (4).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131675.
Solicitante: P.S.I. POOL SERVICES ISRAEL LTD.
Nacionalidad solicitante: Israel.
Dirección: Alon Tavor Industrial Zone P.O. Box 1088 AFULA ELITE 18550 ISRAEL.
Inventor/es: TOREM,Ben Zion.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E04H4/16 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 4/00 Piscinas para nadar o para chapotear (generadores de olas en las bañeras A47K 3/10; separación de B01D; tratamiento del agua C02F; bombas que producen olas F04D 35/00). › especialmente adaptados para la limpieza de las piscinas para nadar o para chapotear (dispositivos de limpieza especiales para barcos B63B 59/00).
Fragmento de la descripción:
Robot para limpiar piscinas.
Campo técnico de la invención
La presente invención se refiere a un robot para limpiar piscinas, que tiene aplicación en la industria de mantenimiento de instalaciones acuáticas, y más concretamente en el ámbito de la realización de las tareas de mantenimiento automatizadas de los vasos de piscinas. Antecedentes de la invención
En la actualidad existen robots para realizar de manera automática las tareas de limpieza de las superficies de los vasos de piscinas, tanto el fondo como las paredes laterales, para lo cual dichos robots tienen capacidad para desplazarse de manera autónoma por el fondo y las paredes del vaso, así como medios de succión y almacenamiento de la suciedad contenida en el vaso, entendiéndose por suciedad cualquier tipo de impurezas tales como hojas o residuos sólidos que quedan depositados en el fondo o bien en las paredes laterales del vaso.
Para su movimiento autónomo, la mayoría de estos robots de limpieza disponen de medios de desplazamiento consistentes en orugas, habitualmente de goma o algún otro material elástico con el objeto de evitar daños a la superficie del vaso. Un ejemplo de este tipo de robots puede encontrarse en la solicitud de patente francesa n.º FR-2946378-A1. Si bien, las orugas permiten disponer de una gran superficie de contacto para el avance del robot, lo que permite una capacidad motriz suficiente para su avance, precisamente por las particularidades que estos medios de desplazamiento presentan, además de que tienen un alto coste de mantenimiento, en el que las orugas sufren un elevado desgaste y cuando se requiere la sustitución por desgaste o rotura de alguna de las orugas, su sustitución resulta difícil. Asimismo, estos dispositivos tienen un elevado número de piezas y su disposición resulta compleja, desde un punto de vista mecánico, lo que implica un elevado coste de fabricación.
Con el objeto de superar los inconvenientes de los robots con orugas, recientemente están saliendo al mercado robots para limpiar piscinas cuyos medios de desplazamiento consisten en ruedas, como por ejemplo, el modelo descrito en la solicitud de patente de diseño estadounidense n.º UD-D599967-S. Este robot, dispone de un rodillo de limpieza o cepillo delantero y una turbina de propulsión trasera, y consta de cuatro ruedas independientes entre sí y dos motorreductores, por lo que el robot dispone de dos ruedas motrices, que en el ejemplo mencionado son las ruedas delanteras. Entre los inconvenientes que presentan estos robots, destaca el hecho de que dada la configuración de sus medios motrices y su transmisión a los medios de desplazamiento, su capacidad de desplazamiento es únicamente en un único sentido, según una misma dirección, pudiendo girar sobre sí mismo para cambiar dicho sentido de avance, o de dirección, lo que implica tiempos muertos de limpieza durante dichas maniobras, que teniendo en cuenta las dimensiones de un vaso, suponen mucho tiempo perdido durante la limpieza de todo el vaso. Descripción de la invención
La presente invención se refiere a un robot para limpiar piscinas, que permite disponer de un robot de tracción a las cuatro ruedas y bidireccional, todo ello con una disposición sencilla, que tiene un coste inferior al de los robots existentes en la actualidad. El robot de la invención permite un montaje y mantenimiento mucho más simple que los robots existentes en la actualidad, precisamente por la sencillez en el número de elementos necesarios así como su disposición.
El robot que la invención propone comprende medios motrices, que pueden transmitir su movimiento a medios de desplazamiento que comprenden dos ruedas dispuestas en línea en cada lateral del robot, teniendo el robot dos laterales.
Pues bien, de acuerdo con la invención los medios motrices consisten en una única unidad motriz, que puede consistir en un motorreductor, que está operativamente conectado, pudiendo transmitir una fuerza motriz que se traduce en movimiento, con dos ruedas situadas en un primer lateral del robot. El robot comprende al menos un eje de transmisión que permite transmitir el movimiento proveniente de la unidad motriz desde dicho primer lateral a las ruedas situadas en un segundo lateral.
De este modo, el robot de la invención tiene la particularidad de que puede considerarse un robot 4x4, con tracción a las cuatro ruedas, lo que permite que el robot se desplace en cualquier sentido según una dirección, es decir que puede ir hacia delante o hacia atrás indistintamente. Esto representa una gran ventaja respecto de los robots existentes en la actualidad, dado que entorno de trabajo es bajo el agua y debe tener suficiente capacidad motriz como para subir por las paredes laterales del vaso. Precisamente por la gran maniobrabilidad del robot, y más concretamente por su capacidad de desplazamiento en ambos sentidos, durante su operación el robot no implica tiempos muertos de limpieza, además de que el robot puede superar obstáculos con mayor facilidad gracias a la tracción a las cuatro ruedas con un único motor de tracción.
En la actualidad los únicos robots que permiten una tracción 4x4 son los del tipo oruga, con las desventajas expuestas anteriormente. Sin embargo, el robot de la invención permite reducir el número de componentes necesarios, y por lo tanto el espacio, lo que a su vez facilita su mantenimiento y permite reducir los costes de fabricación, mantenimiento y reparación respecto de los robots existentes en la actualidad, siendo todos estos condicionantes especialmente relevantes dadas las condiciones del lugar de trabajo del robot, que exigen una total estanqueidad. La invención permite así rebajar el coste total del dispositivo, al reducir de dos a uno los motores reductores, con lo que ello implica en cuanto a reducción de componentes y riesgo cuando el dispositivo trabaja bajo el agua.
Por todo lo anterior, otro tipo de soluciones no proporcionan los efectos que se consigue con la invención. En este sentido no es posible conseguir una tracción a las cuatro ruedas mediante un eje fijo que una las ruedas traseras y delanteras por motivos del escaso espacio disponible, siendo este el motivo por el que los robots actuales incorporan dos motores reductores.
Se contempla la posibilidad de que el robot comprenda al menos un rodillo de limpieza que se encuentra situado alrededor de un eje de transmisión, de este modo se aprovecha dicho eje de transmisión para incorporar en un cepillo para la limpieza, lo cual, si bien es opcional resulta de mucha utilidad.
Asimismo, también se contempla que el eje de transmisión se disponga en su posición operativa mediante el alojamiento de al menos dos pivotes en al menos dos orificios, pudiendo situarse los pivotes en el eje de transmisión y los orificios en una carcasa que comprende el robot, o bien al revés, lo que permite que el eje de transmisión pueda ser desenclavado secuencialmente, primero de un orifico y luego de otro, y así ser retirado fácilmente por parte del usuario para el intercambio del rodillo de limpieza, sin necesidad de que intervenga un operador técnico. Asimismo, se contempla que dichos pivotes sean retráctiles.
El hecho de que el eje de transmisión se pueda extraer por el propio usuario para su mantenimiento
o recambio, para permitir la intercambiabilidad tanto de eje como del rodillo resulta una gran ventaja, dado que en los robots actuales requieren que dicho cambio lo realice el servicio técnico, aunque en modelos recientes los rodillos de limpieza pueden ser extraídos por el propio usuario, ya que están unidos a la carcasa mediante unos tornillos. No obstante el robot de la invención presenta la ventaja de que no requiere tornillos para el enclavamiento del eje de transmisión en su posición operativa, por lo que puede extraerse para cambiar los rodillos, para mantenimiento o por sustitución con una simple llave, o incluso con un bolígrafo o similar, presionando secuencialmente sobre los pivotes para desenclavarlos.
De este modo el eje y el cepillo pueden ser extraídos sin necesidad de herramientas como destornilladores, etc. Descripción de los dibujos
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
La figura 1. Muestra una vista en perspectiva del robot para limpiar piscinas que la invención propone, desde un punto de vista superior, pudiendo apreciarse la situación de los depósitos de almacenaje de suciedad.
...
Reivindicaciones:
1. Robot para limpiar piscinas, que comprende medios motrices, que pueden transmitir su movimiento a medios de desplazamiento, donde dichos medios de desplazamiento comprenden dos ruedas (2) dispuestas en línea en cada lateral (3, 4) del robot, teniendo el robot dos laterales (3, 4) , caracterizado por que los medios motrices consisten en una unidad motriz
(5) que está operativamente conectada con dos ruedas
(2) situadas en un primer lateral (3) del robot, comprendiendo al menos un eje de transmisión (6) que permite transmitir el movimiento proveniente de la unidad motriz (5) desde dicho primer lateral (3) a las ruedas (2) situadas en un segundo lateral (4) .
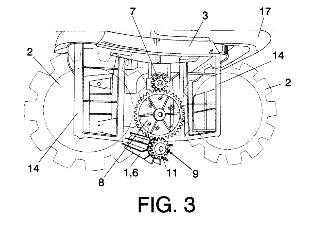
2. Robot para limpiar piscinas, según la reivindicación 1, que comprende una rueda dentada motriz (7) directamente conectada a la unidad de motriz (5) , estando dicha rueda dentada motriz (7) operativamente conectada con una primera rueda dentada intermedia
(8) que puede transmitir movimiento a dos ruedas (2) situadas en el primer lateral (3) del robot, donde dicha primera rueda dentada intermedia (8) puede a su vez estar operativamente conectada con una primera rueda dentada de transmisión (9) que está fijada en un primer extremo del eje de transmisión (6) , donde un segundo extremo de dicho eje de transmisión tiene fijada una segunda rueda dentada de transmisión (9) que puede estar operativamente conectada a una segunda rueda dentada intermedia (8) que puede transmitir movimiento a dos ruedas (2) situadas en el segundo lateral (4) del robot.
3. Robot para limpiar piscinas, según la reivindicación 2, en el que la transmisión de movimiento de las ruedas dentadas intermedias (8, 8) a las ruedas (2) se realiza mediante ruedas dentadas (10) que están fijadas al lado interno de las ruedas (2) , estando dichas ruedas dentadas (10) operativamente conectadas a las ruedas dentadas intermedias (8, 8) .
4. Robot para limpiar piscinas, según cualquiera de las reivindicaciones anteriores, que comprende al menos un rodillo de limpieza (1) se encuentra situado alrededor de un eje de transmisión (6) .
5. Robot para limpiar piscinas, según cualquiera de las reivindicaciones anteriores, en el que el eje de transmisión (6) se dispone en su posición operativa mediante el alojamiento de al menos dos pivotes (11) en al menos dos orificios (12) .
Patentes similares o relacionadas:
Vehículo de limpieza de piscinas automatizado con elementos de depuración rotatorios y estacionarios, del 15 de Julio de 2020, de Upward Sales Limited: Vehículo de limpieza de piscinas (PCV) completamente sumergible y automatizado para desinfectar el agua de una piscina, donde el PCV comprende: una carcasa […]
Robot de limpieza de piscinas que tiene una unidad de filtrado y un sensor, del 24 de Junio de 2020, de MAYTRONICS LTD.: Un robot de limpieza de piscinas, que comprende: una unidad de filtrado para filtrar fluido que pasa a través de la unidad […]
Robot de limpieza de piscinas con empujes de chorro direccionales, del 10 de Junio de 2020, de MAYTRONICS LTD.: Un limpiador de piscinas que comprende: una carcasa ; un motor de accionamiento que está configurado para ayudar a mover el limpiador […]
Limpiador de piscinas con oruga rodante ajustable para controlar la velocidad del flujo de agua, del 10 de Junio de 2020, de Forever Vanture Technology Limited: Limpiador de piscinas que comprende: una carcasa con una entrada formada en una sección inferior de la misma; […]
Método y aparato para proporcionar señales eléctricas relacionadas con la orientación desde un limpiador robótico de piscinas que tiene un sensor de orientación a una fuente de alimentación remota a través de un cable de dos hilos, del 3 de Junio de 2020, de AQUA PRODUCTS INC.: Método para limpiar una superficie de una piscina con un limpiador robótico de piscinas que tiene un motor eléctrico para mover el limpiador (100, […]
Método para operar un robot de limpieza de piscinas interactivo, del 27 de Mayo de 2020, de MAYTRONICS LTD.: Un método para operar un robot de limpieza de piscinas, el método comprende: recibir, procedente de un usuario y mediante […]
Robot limpiador de piscinas, del 13 de Mayo de 2020, de MAYTRONICS LTD.: Un robot limpiador que comprende: un alojamiento que comprende una entrada de fluido, una salida de fluido, un borde trasero y un borde […]
Dispositivo de lavado para recibir una solución de lavado de una tubería y procedimiento de lavado de la tubería, del 29 de Abril de 2020, de A.P.F. Aqua System AG: Dispositivo de lavado para recibir una solución de lavado de una tubería, en el que el dispositivo de lavado presenta: un elemento base […]