Procedimiento y sistema de detección de la activación de la reversa en el aterrizaje de una aeronave.
La invención consiste en un sistema de captación sonoro que es capaz de detectar la activación de la reversa durante el aterrizaje de los aviones a partir de la detección e identificación de los sonidos producidos en el proceso.
Así mismo, la invención incluye el procedimiento que debe seguirse con respecto a la ubicación de los sensores. La invención dotará a los aeropuertos de una herramienta con la que velar por el cumplimento de las normativas referidas a la activación de la reversa en materia de ruido y medio ambiente.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231247.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: RUIZ GONZALEZ,MARIANO, RECUERO LOPEZ,MANUEL, ASENSIO RIVERA,CESAR, LÓPEZ NAVARRO,Juan Manuel, DE ARCAS CASTRO,Guillermo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01H3/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01H MEDIDA DE VIBRACIONES MECANICAS O DE ONDAS ULTRASONORAS, SONORAS O INFRASONORAS. › G01H 3/00 Medida de vibraciones utilizando un detector en un fluido (G01H 7/00, G01H 9/00, G01H 11/00 tienen prioridad). › Amplitud; Potencia.
Fragmento de la descripción:
PROCEDIMIENTO Y SISTEMA DE DETECCIÓN DE LA ACTIVACIÓN DE LA REVERSA EN EL ATERRIZAJE DE UNA AERONAVE
SECTOR TÉCNICO
La invención se engloba en el campo de la instrumentación acústica, el procesado de señal y el reconocimiento de patrones. Su aplicación tendrá influencia en el medio ambiente, ya que la inspección y detección del ruido de reversa permitirá una aplicación efectiva de políticas coercitivas y sancionadoras en los aeropuertos, al disponer de herramientas de vigilancia para hacer cumplir las restricciones existentes a este respecto, reduciendo la contaminación acústica y mejorando la integración con las comunidades adyacentes.
ANTECENDENTES DE LA INVENCIÓN
Aparte de la instrumentación existente en la propia aeronave, no existen en los aeropuertos sistemas dedicados a la tarea de detectar si dicha aeronave ha activado o no la reversa para frenar tras el aterrizaje. Por este motivo resulta complicado para las autoridades aeroportuarias hacer cumplir las restricciones existentes en muchos de los aeropuertos referentes al uso de la reversa. Algunos intentos previos, han utilizado los registros de nivel sonoro efectuados por los terminales de monitorizado de ruido del aeropuerto para intentar identificar un patrón, consistente en la existencia de dos eventos sonoros consecutivos. Sin embargo, dichos intentos no han sido eficaces debido al gran número de factores cuya variabilidad y dispersión alteran las características de los eventos y dificultan la detección automática hasta extremos tales que la hacen prácticamente imposible: tipos de aeronaves, velocidad en el aterrizaje, punto de contacto, zona de activación de la reversa, intensidad de activación de la reversa, duración de la activación, proximidad entre la ubicación del monitor y la zona de activación de la reversa, ruido de fondo. Por otra parte, otros sistemas basados en reconocimiento de patrones, como el ES2334429 “Sistema y procedimiento de detección e identificación de sonidos en tiempo real producidos por fuentes sonoras específicas” tampoco se muestran efectivos, debido al gran parecido entre el sonido emitido por la activación de la reversa y el producido por la “cola” del aterrizaje.
DESCRIPCIÓN DE LA INVENCIÓN
La invención consiste en un procedimiento y un sistema que es capaz de identificar de manera automática la activación de la reversa durante el aterrizaje de los aviones a partir de la detección e identificación de los sonidos producidos en el proceso. Este objetivo se consigue mediante las características presentes en las reivindicaciones independientes. Realizaciones particulares se muestran en las reivindicaciones dependientes. El sistema de detección de la activación de la reversa en el aterrizaje de una aeronave comprende: -Un módulo de captación para grabar sonido, que incluye un primer micrófono y un segundo micrófono. -Un módulo de detección para detectar un primer evento si el nivel de presión sonora medida en el primer micrófono supera un primer umbral, Pr1, de nivel de presión sonora durante un primer intervalo de tiempo. -Un módulo estimador para estimar la distancia r (t) de los medios de captación (11) a la aeronave (24) a partir del ángulo de procedencia del sonido calculado mediante correlación cruzada, -Un módulo de propagación inversa para calcular la potencia sonora, Lw (t) , a partir del nivel de presión de sonido medido, Lp (t) , y de la distancia estimada, r (t) , -Un módulo de detección para detectar un segundo evento si cumple que:
-El avión ha cruzado el eje del sistema de captación (instante T1) . -Con posterioridad a T1, la pendiente a largo plazo de Lw (t) supera un umbral durante un segundo intervalo de tiempo, condición que se cumple en T2 -con posterioridad a T2 el nivel de potencia sonora supera un umbral Pot2 durante un tercer intervalo de tiempo .
-Dos módulos clasificadores encargados de clasificar el primer evento como aterrizaje de la aeronave y el segundo evento como activación de la reversa mediante la aplicación de técnicas de reconocimiento estadístico de patrones. -Un módulo que identifica la activación de la reversa en el supuesto de que el primer evento detectado sea clasificado como aterrizaje y el segundo sea clasificado como reversa.
Por su parte y de forma análoga al sistema mostrado, el procedimiento de detección de la activación de la reversa en el aterrizaje de una aeronave comprende realizar las siguientes acciones:
-Grabar los sonidos, con unos medios de captación. Estos medios de captación incluyen un primer micrófono orientado hacia la zona de flotación (avión está en vuelo) de la pista de un aeropuerto y un segundo micrófono orientado hacia la pista de frenada (avión aterriza) de la pista de un aeropuerto.
-Detectar un primer evento si el nivel de presión sonora medida en el primer micrófono supera un primer umbral, Pr1, de nivel de presión sonora durante un primer intervalo de tiempo. Ello busca detectar que el avión se aproxima para tomar tierra.
-Estimar la distancia r (t) de los medios de captación (11) a la aeronave (24) a partir del ángulo de procedencia del sonido calculado mediante correlación cruzada.
-Con la distancia, se calcula la potencia sonora, Lw (t) que es empleada para
detectar un segundo evento si se cumplen las condiciones siguientes: i) La detección se producirá a partir del tiempo T1 (necesariamente posterior a T0) , que se corresponde al instante en que el avión cruza por delante del eje de los micrófonos. En el caso de que T1 no sea encontrado durante el transcurso del evento inicial, no se proseguirá con la detección del evento secundario. En el caso de que se detecte T1, se procederá a la búsqueda de T2. ii) La detección se producirá a partir de T2, instante en que por primera vez tras T1 la pendiente de la evolución temporal de la potencia pasa de ser negativa a ser positiva (cruce por cero) . Esta situación determina un nuevo incremento del nivel sonoro. iii) Que, con posterioridad a T2, el nivel de potencia sonora supera un umbral Pot2 durante un intervalo de tiempo.
De esta forma, se dispone de dos eventos candidatos que es posible asignar al aterrizaje de la aeronave en el caso del primer evento. Análogamente, para el segundo evento, a la activación de la reversa en función de un reconocimiento estadístico de patrones. Opcionalmente, los micrófonos son cardioides y sus ejes forman entre sí un ángulo comprendido entre 90º y 180º. Ventajosamente, la línea que une las cápsulas de los dos micrófonos debe ser paralela a al pista.
Opcionalmente, se puede realizar un filtrado paso-alta de la señal del primer micrófono (21) . Ventajosamente, la frecuencia de filtrado se elige en un rango comprendido entre 5 KHz y 5.2 kHz. Para calcular la potencia sonora, Lw (t) , se debe emplear un modelo inverso de propagación que considera la divergencia esférica y la atenuación atmosférica. Por ejemplo, la norma ISO 9613. Opcionalmente, se puede realizar un filtrado paso-bajo de la señal del segundo micrófono. Opcionalmente, extraer las características del segundo evento comprende calcular el
momento, T3, en el que la pendiente de Lw (t) tiene un valor máximo. Para ello, se puede calcular la pendiente de Lw (t) mediante regresión lineal.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
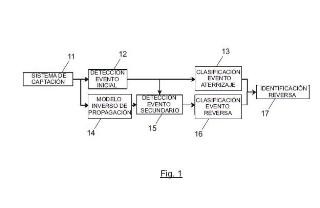
Figura 1: Esquema de bloques de la invención donde se muestra un esquema básico de funcionamiento de la invención. Las señales captadas por los sensores son utilizadas para la detección de un evento inicial y otro secundario. Dichos eventos son clasificados como aterrizaje, reversa u otro. En función de los resultados de la clasificación de los eventos la activación de la reversa quedará o no identificada.
Figura 2: Localización del sistema de captación en una zona típica donde el avión contacta con la pista. Una vez el avión planta por completo el tren de aterrizaje, se produce la frenada, que puede incluir o no la utilización de la reversa. El sistema de captación debe estar tan alejado como sea posible de la zona de activación de la reversa, pero no tanto como para que el sonido producido sea enmascarado por el ruido de fondo del aeropuerto.
Figura 3: Esquema detector eventos iniciales. Un detector de umbrales de nivel y duración aplicados sobre el nivel de presión sonoro permite detectar el sonido 30 producido por el aterrizaje de los aviones. El filtrado de alta frecuencia de la señal permite reducir el número de falsos positivos.
Figura 4: Modelo inverso de propagación. Se muestra cómo a partir del nivel de presión sonora se realizará una estimación de la potencia acústica radiada. La 35 transformación entre ambas magnitudes requiere...
Reivindicaciones:
1. Procedimiento de detección de la activación de la reversa en el aterrizaje de una aeronave caracterizado por que comprende: -grabar el sonido, con unos medios de captación (11) que comprenden:
- un primer micrófono (21) orientado hacia la zona de flotación (25) de la pista de un aeropuerto, -un segundo micrófono (22) orientado hacia la pista de frenada (23) de la pista de un aeropuerto,
-detectar un primer evento si el nivel de presión sonora medido en el primer micrófono
(21) supera un primer umbral, Pr1, de nivel de presión sonora durante un primer intervalo de tiempo, -detectar el momento, T1, en el que el avión pasa por delante de los sistemas de captación, -estimar la distancia r (t) de los medios de captación (11) a la aeronave (24) a partir del ángulo de procedencia del sonido calculado mediante correlación cruzada, -calcular la potencia sonora, Lw (t) , mediante el nivel de presión de sonido medido, Lp (t) , y de la distancia estimada, r (t) , -detectar un segundo evento si, tras detectar el primer evento, la pendiente de Lw (t) supera un umbral durante un segundo intervalo de tiempo, condición que se cumple en el momento T2, y además, con posterioridad a T2 el nivel de potencia sonora supera un umbral Pot2 durante un tercer intervalo de tiempo, -clasificar para identificar el primer evento como aterrizaje de la aeronave y el segundo evento como activación de la reversa en función de un reconocimiento estadístico de patrones.
2. Procedimiento según la reivindicación 1, caracterizado por que los micrófonos (21, 22) son cardioides y sus ejes forman entre sí un ángulo comprendido entre 90º y 180º.
3. Procedimiento según la reivindicación 2, caracterizado por que la línea que une las cápsulas de los micrófonos es paralela a la pista (25, 23) .
4. Procedimiento según una cualquiera de las reivindicaciones anteriores, caracterizado por que comprende analizar el sonido captado por los micrófonos (21, 22) para identificar el momento, T1, en el que el retraso temporal del sonido captado por ambos cambia de signo.
5. Procedimiento según una cualquiera de las reivindicaciones anteriores, caracterizado por que detectar un primer evento comprende: filtrar paso-alto la señal del primer micrófono (21) , medir el nivel de presión sonora en dicha señal, Lp (t) , y realizar una detección mediante umbrales sobre Lp (t) .
1.
6. Procedimiento según la reivindicación 5, caracterizado por que la frecuencia de filtrado se elige en un rango comprendido entre 5 KHz y 5.2 kHz.
7. Procedimiento según una cualquiera de las reivindicaciones anteriores,
caracterizado por que calcular la potencia sonora, Lw (t) , se realiza según un modelo inverso de propagación que considera la divergencia esférica y la atenuación atmosférica del sonido.
8. Procedimiento según la reivindicación 7, caracterizado por que comprende: filtrar
paso-bajo la señal del segundo micrófono (22) , medir el nivel de presión sonora de dicha señal, Lp (t) , estimar el nivel de potencia acústica asociado, Lw (t) , y realizar una detección mediante umbrales sobre Lw (t) .
9. Procedimiento según una cualquiera de las reivindicaciones anteriores,
caracterizado por que detectar el segundo evento comprende calcular el momento, T3, en el que la pendiente de Lw (t) cambia su signo a negativo presentando un máximo local.
10. Procedimiento según la reivindicación 9, caracterizado por que comprende 30 calcular la pendiente de Lw (t) mediante regresión lineal.
11. Sistema de detección de la activación de la reversa en el aterrizaje de una aeronave caracterizado por que comprende: -un módulo de captación (11) configurado para grabar sonido, que comprende:
-un primer micrófono (21) orientado hacia la zona de flotación (25) de la pista
de un aeropuerto, -un segundo micrófono (22) orientado hacia la pista de frenada (23) de la pista de un aeropuerto,
-un módulo de detección (12, 15, 15, 33, 52) configurado para detectar un primer evento si el nivel de presión medida en el primer micrófono (21) supera un primer umbral, Pr1,
de presión sonora durante un primer intervalo de tiempo, -un módulo estimador (41, 42, 43) configurado para estimar la distancia r (t) de los medios de captación (11) a la aeronave (24) a partir del ángulo de procedencia del sonido calculado mediante correlación cruzada, -un módulo de propagación inversa (14) configurado para calcular la potencia sonora,
Lw (t) , a partir del nivel de presión de sonido medido, Lp (t) , y de la distancia estimada, r (t) , -el módulo de detección (12, 15, 33, 52) configurado para detectar un segundo evento si, tras detectar el primer evento, la pendiente de Lw (t) supera un umbral durante un segundo intervalo de tiempo, condición que se cumple en el momento T2 y además,
con posterioridad a T2 el nivel de potencia sonora supera un umbral Pot2 durante un tercer intervalo de tiempo, -dos módulos clasificadores (13, 16) encargados de clasificar para identificar el primer evento como aterrizaje de la aeronave y el segundo evento como activación de la reversa mediante la aplicación de técnicas de reconocimiento estadístico de patrones.
12. Sistema según la reivindicación 11, caracterizado por que los micrófonos (21, 22) son cardioides y sus ejes forman entre sí un ángulo comprendido entre 90º y 180º.
13. Sistema según una cualquiera de las reivindicaciones anteriores 11 o 12,
caracterizado por que comprende analizar el sonido captado por los micrófonos (21, 22) para identificar el momento, T1, en el que el retraso temporal del sonido captado por ambos cambia de signo.
14. Sistema según una cualquiera de las reivindicaciones anteriores 11 a 13, 35 caracterizado por que detectar un primer evento comprende: filtrar paso-alto la señal del primer micrófono (21) , medir el nivel de presión sonora en dicha señal, Lp (t) , y realizar una detección mediante umbrales sobre Lp (t) .
15. Sistema según una cualquiera de las reivindicaciones anteriores 11 a 14,
caracterizado por que comprende: filtrar paso-bajo la señal del segundo micrófono (22) , medir el nivel de presión sonora de dicha señal, Lp (t) , estimar el nivel de potencia acústica asociado, Lw (t) , y realizar una detección mediante umbrales sobre Lw (t) .
16. Sistema según la reivindicación 15, caracterizado por que la frecuencia de filtrado 10 se elige en un rango comprendido entre 100 Hz y 1 kHz.
16
Fig.º1
Fig.º2
Fig.º3
14
41 42
45
Fig.º4
15
Fig.º5
Fig.º6
Patentes similares o relacionadas:
Método y dispositivo para determinar coeficientes acústicos y potencia acústica, del 11 de Mayo de 2016, de SoundInsight B.V: Método para determinar el coeficiente de absorción acústica y/o el coeficiente de transmisión acústica en una posición elegida en un espacio […]
 SISTEMA DE PRUEBA DE ANCLAJE A TIERRA, del 19 de Febrero de 2010, de ABERDEEN UNIVERSITY UNIVERSITY OF BRADFORD: Un método para valorar la integridad de los anclajes a tierra, el método comprende los métodos de:
(a) Transmitir un impulso de carga a un tendón de anclaje […]
SISTEMA DE PRUEBA DE ANCLAJE A TIERRA, del 19 de Febrero de 2010, de ABERDEEN UNIVERSITY UNIVERSITY OF BRADFORD: Un método para valorar la integridad de los anclajes a tierra, el método comprende los métodos de:
(a) Transmitir un impulso de carga a un tendón de anclaje […]