Método y dispositivo para la retirada de una hoja de una planta de cultivo.
Método para la retirada de hojas (14) de una planta de cultivo (11),
que comprende la observación de una primerahoja de la planta de cultivo desde una posición baja usando técnicas de visión para determinar la retirada de la primerahoja, la retirada de dicha primera hoja por medios de arrancamiento, donde dicha retirada comprende el hecho deagarrar dicha hoja o su peciolo, arrancar dicho peciolo del tallo central de la planta de cultivo y apartar la hoja de dichaplanta de cultivo, la observación repetida desde abajo de dicha planta de cultivo después de la retirada de dicha hoja yel uso de dichas técnicas de visión para determinar la hoja posterior que va a ser retirada a continuación y la retirada dedicha hoja posterior.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2009/050191.
Solicitante: Zeelen, Ronald.
Nacionalidad solicitante: Países Bajos.
Dirección: Hof van Azuur 42 2614 TB Delft PAISES BAJOS.
Inventor/es: ZEELEN,RONALD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01D46/30 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › A01D 46/00 Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos. › Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
- A01G3/00 A01 […] › A01G HORTICULTURA; CULTIVO DE HORTALIZAS, FLORES, ARROZ, FRUTOS, VID, LÚPULO O ALGAS; SILVICULTURA; RIEGO (recolección de frutas, verduras, lúpulo o productos similares A01D 46/00; crecimiento de algas unicelulares C12N 1/12). › Instrumentos de corte especialmente adaptados para la horticultura; Desramado de árboles en pie (desramadoras A01G 23/095).
PDF original: ES-2404332_T3.pdf
Fragmento de la descripción:
Método y dispositivo para la retirada de una hoja de una planta de cultivo [0001] La presente invención se refiere a un método para la retirada de una parte, tal como una hoja de una planta de cultivo, con un tallo central, que comprende el acercamiento a dicha parte mediante un brazo robot usando técnicas de visión, el agarre de dicha parte de la planta de cultivo mediante dicho brazo y la retirada de esta mediante dicho brazo.
Tal método se conoce del documento NL 102 47 02. En él, un brazo localizado en un carrito se mueve hacia el tallo principal de una planta de cultivo. El brazo y, en particular, las cuchillas de corte montadas en el mismo, se agarran alrededor del tallo principal y el brazo con cuchillas se mueve posteriormente hacia arriba a lo largo del tallo principal, retirando todos los pecíolos que sobresalen del tallo principal. Aunque este método es eficaz con respecto a la retirada de las hojas, está claro que los pecíolos no se cortan por el mejor lugar posible. El documento NL 2000333 describe un método para la retirada de hojas, donde el peciolo se usa como una guía para el dispositivo usado en el método. En él, se mueve un dispositivo de corte de una posición inferior a una posición más alta a lo largo del tallo principal. Se utiliza un sistema de visión para encontrar una ramificación desviada del primer tallo lateral. Este sistema de visión funciona en dirección lateral.
Del estado de la técnica se conocen otros métodos para la retirada de partes de plantas de cultivo, tales como el acercamiento lateral a la planta de cultivo y el movimiento de los brazos de corte en la planta de cultivo basados en las fuerzas detectadas cuando la operación se ha realizado.
Dichas técnicas tienen la desventaja de que se requiere una gran cantidad de software para que se tomen las decisiones correctas con respecto al proceso de corte y, debido a su complejidad, el número de partes de la planta de cultivo retiradas por unidad de tiempo es insuficiente para hacer esta técnica competitiva en comparación con la retirada manual de hojas.
Un ejemplo de la retirada de partes de plantas de cultivo se puede apreciar en los tomates y/o pepinos. En el caso de los tomates, el objeto es retirar las hojas de entre las frutas. Esto impide que tengan lugar enfermedades y favorece el crecimiento de otras partes de la planta de cultivo. En otras plantas de cultivo, son razones similares o diferentes las que requieren la retirada de las hojas.
Un objeto de la presente invención es proveer un método con el cual sea posible retirar partes de plantas de cultivo, tales como hojas o (pequeños) brotes de plantas de cultivo, de una forma eficaz y relativamente rápida.
Además, un objeto de la presente invención es permitir la retirada de hojas con una rapidez considerable, con medios robustos y relativamente simples, ambos en relación al sistema electrónico aplicado, así como el mecánico. Esto se refiere a las hojas ya mencionadas que se encuentran bajo una fruta, al igual que a aquellas encontradas en otras partes de la planta de cultivo, mientras las frutas no se vean afectadas.
Este objeto se consigue con un método para la retirada de una hoja de una planta de cultivo que comprende la observación de la planta de cultivo desde una posición baja usando técnicas de visión para determinar la retirada de la hoja, la retirada de dicha hoja por medios de arrancamiento, donde dicha retirada comprende la acción de agarrar dicha hoja o su peciolo, separando dicho peciolo del tallo central de la planta de cultivo y apartando la hoja de dicha planta de cultivo, después de la retirada de dicha hoja, la observación repetida de dicha planta de cultivo y el uso de las técnicas de visión para determinar la retirada de la siguiente hoja y luego la retirada de dicha hoja.
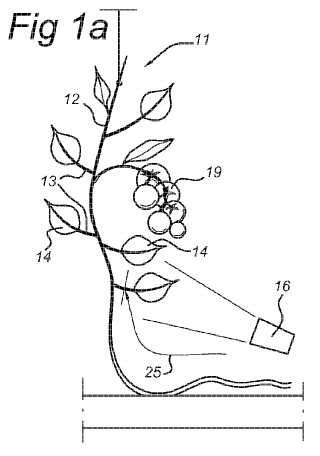
Según la presente invención, la planta de cultivo es observada desde abajo o desde otro punto de partida, por ejemplo, con una cámara. Esto significa que, a diferencia de los métodos previamente conocidos, ya no se mueve una cámara en la densa planta de cultivo, sino que la planta de cultivo se observa sólo (oblicuamente) desde abajo de la planta de cultivo. Posteriormente, se determina qué hoja se debe retirar, preferiblemente la más baja, y esta puede ser arrancada del tallo principal de la planta de cultivo de alguna manera conocida en el estado de la técnica. Al hacer eso, es importante que la hoja individual retirada de ese modo no sea simplemente liberada tras ser arrancada del tallo principal, sino que sea retirada de la proximidad de la planta de cultivo de alguna manera concebible. Esta retirada de hojas de la proximidad de la planta de cultivo puede comprender la recogida de las hojas en la proximidad directa de la misma, pero también su transporte a un contenedor proporcionado para tal fin. Posteriormente, de da una nueva situación, en la que la hoja en cuestión ha sido retirada de la planta de cultivo. Sobre esta base, la planta de cultivo se observa nuevamente desde abajo y la cámara conectada posee una vista no obstruida de la hoja siguiente considerada para retirar. Por consiguiente, la hoja siguiente puede ser retirada por unos medios de arrancamiento relativamente simples. De esta manera, las hojas son arrancadas de la planta de cultivo paso a paso, desde una posición de proximidad baja, donde las técnicas de visión relacionadas con la cámara, con la que se controlan los medios de arrancamiento, están siempre en una situación óptima para el reconocimiento de la hoja. Esta situación puede ser optimizada, además, por la introducción de profundidad, por ejemplo, y otras características que distinguen la posición de la hoja más baja con respecto a las hojas restantes. También es posible empezar con la retirada de hojas en una posición más alta y trabajar hacia arriba desde dicha posición. En este caso, se pueden retirar sólo un número limitado de hojas o similares.
Con la presente invención, no sólo es posible retirar las hojas de una planta de cultivo desde abajo de la manera anteriormente descrita, sino que además es posible retirar las hojas de otras plantas de cultivo al moverse hacia arriba si las plantas de cultivo están localizadas muy próximas unas a otras. Eso significa que, a diferencia de los sistemas que se orientan en su totalidad hacia el tallo de una planta de cultivo, con la presente invención es posible usar las técnicas de visión para la observación y la retirada hoja a hoja de plantas de cultivo adyacentes como se ven desde abajo de la planta de cultivo. Ya que la vista de la hoja en cuestión no está esencialmente obstruida, porque es frecuentemente la hoja más baja del entorno, la retirada se puede realizar de manera ininterrumpida y óptima, permitiendo así que la automatización relacionada sea relativamente simple.
Además, las técnicas de visión aplicadas se pueden desarrollar de manera que se haga una distinción entre una hoja y otra parte de la planta de cultivo, tal como una fruta. En tal caso, una fruta no puede ser arrancada aunque una hoja localizada muy próxima a ella y alrededor de la fruta pueda ser ciertamente arrancada.
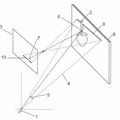
Ya que es muy posible que las hojas se encuentren en lados diferentes de un tallo central, la observación con una cámara puede mejorar significativamente si, por ejemplo, la planta de cultivo se observa desde distintas posiciones hacia arriba (oblicuamente) desde un plano horizontal. Esto mejora, además, si el robot que forma parte de los medios de arrancamiento se mueve en la línea visual de la cámara. Ya que las hojas son arrancadas de la planta de cultivo desde abajo y hacia arriba, los medios de arrancamiento pueden hacerse menos compactos y, por lo tanto, más rápido o robustos, porque para los medios de arrancamiento no es necesario extenderse a través de la planta de cultivo densa.
Preferiblemente, el hecho de arrancar la hoja y, en particular, su tallo se realiza en una posición cercana a la unión del peciolo al tallo central. Esto se puede conseguir, por ejemplo, permitiendo a los medios de arrancamiento que agarren primero la hoja y posteriormente, muevan los medios de arrancamiento tan lejos como sea posible a lo largo de dicha hoja hacia el tallo central, posiblemente a lo largo del peciolo hacia el punto de unión del peciolo al tallo central. La acción de arrancamiento puede posteriormente ser activada por el contacto de los medios de arrancamiento con el tallo central. Adicionalmente, según una forma de realización ventajosa de la invención, otras partes de la planta de cultivo, tales como frutas, son apartadas sin causarles daño.
Según la presente invención, no hay esencialmente ningún contacto con el tallo central salvo cuando se mueve desde la hoja hacia el tallo central para... [Seguir leyendo]
Reivindicaciones:
1. Método para la retirada de hojas (14) de una planta de cultivo (11) , que comprende la observación de una primera hoja de la planta de cultivo desde una posición baja usando técnicas de visión para determinar la retirada de la primera hoja, la retirada de dicha primera hoja por medios de arrancamiento, donde dicha retirada comprende el hecho de agarrar dicha hoja o su peciolo, arrancar dicho peciolo del tallo central de la planta de cultivo y apartar la hoja de dicha planta de cultivo, la observación repetida desde abajo de dicha planta de cultivo después de la retirada de dicha hoja y el uso de dichas técnicas de visión para determinar la hoja posterior que va a ser retirada a continuación y la retirada de dicha hoja posterior.
2. Método según la reivindicación 1, donde dichas técnicas de visión se utilizan para diferenciar entre una hoja y otra parte de una planta de cultivo, tal como un fruto, donde dicha otra parte es excluida de la operación de retirada.
3. Método según cualquiera de las reivindicaciones precedentes, donde dicha observación comprende la observación 15 desde dos posiciones diferentes en un plano horizontal.
4. Método según cualquiera de las reivindicaciones precedentes, donde dicha acción de agarrar/arrancar dicha hoja o peciolo comprende la acción de agarrar y arrancar el peciolo del tallo en una posición muy próxima al tallo.
5. Método según la reivindicación 4, donde, después de agarrar dicha hoja, los medios de arrancamiento usados para arrancar el peciolo mueven el tallo central hacia los medios de arrancamiento.
6. Método según la reivindicación 5, donde dicho movimiento del tallo central es continuado hasta que haya un contacto con los medios de arrancamiento. 25
7. Método según cualquiera de las reivindicaciones precedentes, donde la acción de arrancar dicha hoja o su peciolo comprende el hecho de apartar otras partes de dicha planta de cultivo.
8. Método según cualquiera de las reivindicaciones precedentes, donde los medios de arrancamiento para arrancar 30 dicha hoja agarran dicha hoja sin contacto previo con el tallo central.
9. Método según cualquiera de las reivindicaciones precedentes, donde dicha acción de arrancar comprende el arrancamiento en dos posiciones del tallo localizadas a una distancia una de la otra.
10. Método según cualquiera de las reivindicaciones precedentes, donde dicho arrancamiento comprende el corte o recorte.
11. Método según cualquiera de las reivindicaciones precedentes, donde los medios de arrancamiento se mueven según la línea visual de dicha cámara. 40
12. Método según cualquiera de las reivindicaciones precedentes, donde la primera hoja y la hoja posterior crecen en plantas de cultivo diferentes.
13. Método según cualquiera de las reivindicaciones precedentes, donde se proveen sensores (cámaras) en los medios 45 de arrancamiento con los que se puede corregir su posición respecto a la hoja.
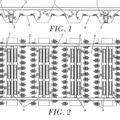
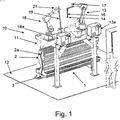
14. Dispositivo para la retirada de una hoja (14) de una planta de cultivo (11) , que comprende una cámara (16) para la observación de una planta de cultivo, una unidad central de procesamiento a la que la cámara está conectada, que comprende técnicas de visión para determinar la retirada de una hoja, un carrito móvil (10) sobre el que se montan los 50 medios de arrancamiento, controlables desde la unidad central de procesamiento, con el fin de agarrar, separar y retirar dicha hoja, caracterizado por el hecho de que hay dispuestas dos cámaras (16) para la observación de una planta de cultivo desde abajo y para posiciones diferentes, y diferentes medios de arrancamiento que actúan en cooperación con ellos.
15. Dispositivo según la reivindicación 14, donde dicha cámara y dicha unidad central de procesamiento están montadas sobre dicho carrito.
Patentes similares o relacionadas:
 Cosecha selectiva automatizada de cultivos, del 28 de Agosto de 2019, de Harvest Croo, LLC: Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato […]
Cosecha selectiva automatizada de cultivos, del 28 de Agosto de 2019, de Harvest Croo, LLC: Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato […]
 EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR, del 20 de Agosto de 2015, de FEDERACION NACIONAL DE CAFETEROS DE COLOMBIA: La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u […]
EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR, del 20 de Agosto de 2015, de FEDERACION NACIONAL DE CAFETEROS DE COLOMBIA: La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u […]
 Dispositivo y método para la separación de una parte de una cosecha, del 25 de Diciembre de 2013, de Prigrow Tomation B.V: Dispositivo para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprendeun portador provisto de medios de agarre para dicha […]
Dispositivo y método para la separación de una parte de una cosecha, del 25 de Diciembre de 2013, de Prigrow Tomation B.V: Dispositivo para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprendeun portador provisto de medios de agarre para dicha […]
 MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS, del 3 de Enero de 2011, de SOLUCIONES ROBOTICAS AGRICOLAS SLU: Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada […]
MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS, del 3 de Enero de 2011, de SOLUCIONES ROBOTICAS AGRICOLAS SLU: Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada […]
 PROCEDIMIENTO Y VEHICULO DE RECOGIDA PARA LA RECOLECCION DE CULTIVOS QUE CRECEN EN TALLOS, del 20 de Mayo de 2010, de EGATEC A/S: Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, […]
PROCEDIMIENTO Y VEHICULO DE RECOGIDA PARA LA RECOLECCION DE CULTIVOS QUE CRECEN EN TALLOS, del 20 de Mayo de 2010, de EGATEC A/S: Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, […]
 DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA, del 4 de Diciembre de 2009, de UNIVERSIDAD POLITECNICA DE MADRID: Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión […]
DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA, del 4 de Diciembre de 2009, de UNIVERSIDAD POLITECNICA DE MADRID: Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión […]
HELICOPTERO CONTROLADO REMOTAMENTE., del 1 de Noviembre de 2006, de MAFLEX S.R.L.: Aparato para recolectar aceitunas, bayas o bien otros frutos, o para llevar a cabo otras operaciones en follaje de plantas, tales como podado o rociado […]
 DISPOSITIVO PARA TRATAR PLANTAS DE CULTIVO QUE CRECEN EN TALLOS, del 1 de Mayo de 2008, de BEHEERSMAATSCHAPPIJ G.A. CH.M.: Dispositivo para tratar plantas de cultivo que crecen en tallos en un lecho de cultivo , siendo móviles entre sí el dispositivo y el lecho de cultivo, constando el dispositivo […]
DISPOSITIVO PARA TRATAR PLANTAS DE CULTIVO QUE CRECEN EN TALLOS, del 1 de Mayo de 2008, de BEHEERSMAATSCHAPPIJ G.A. CH.M.: Dispositivo para tratar plantas de cultivo que crecen en tallos en un lecho de cultivo , siendo móviles entre sí el dispositivo y el lecho de cultivo, constando el dispositivo […]