PROCEDIMIENTO Y VEHICULO DE RECOGIDA PARA LA RECOLECCION DE CULTIVOS QUE CRECEN EN TALLOS.
Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos,
como tomates en ramillete, uvas y similares, en el que el procedimiento comprende las siguientes etapas:
a) colocar un vehículo de recogida adyacente a una planta que tiene fruta a lo largo de una fila de plantas que tienen fruta;
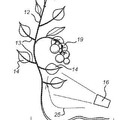
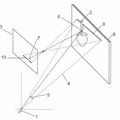
b) activar un sistema de visión, de forma que el sistema de visión reconocerá la presencia de un ramillete o de un racimo de frutas o verduras en dicha planta, y determinar si las frutas o verduras están maduras para ser recolectadas; si el racimo o el ramillete está maduro para ser recolectado el procedimiento prosigue a la etapa c) o, de lo contrario, prosigue a la siguiente planta y prosigue a la etapa a);
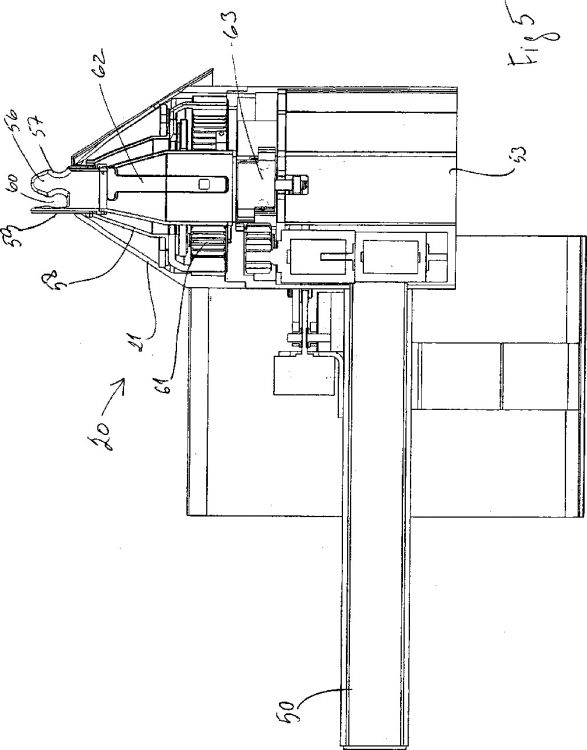
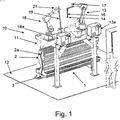
c) activar un primer medio de agarre dispuesto debajo de una estación de corte para agarrar un tallo que tiene fruta y traccionar dicho tallo ligeramente hacia el vehículo, medios de agarre que se pueden hacer extender desde el vehículo de recogida, y medios de agarre que son amovibles en una dirección paralela a la fila del desplazamiento del vehículo;
d) activar un segundo medio de agarre dispuesto por encima de la estación de corte, en el que dicho segundo medio de agarre tiene las mismas funcionalidades que el primer medio de agarre;
e) ajustar el tallo en una posición sustancialmente vertical, al mover los medios primero y segundo de agarre en el plano horizontal;
f) retirar de forma simultánea los medios primero y segundo de agarre hacia el vehículo, por lo que el tallo entra en una estación de corte, estación de corte que es cilíndrica con un eje vertical, y está dotada de una ranura vertical que permite que el tallo entre en el interior de la estación de corte, después de lo cual se cierra la ranura en la estación de corte;
g) el segundo medio de agarre libera el tallo;
h) si se ha desactivado el sistema de visión, se vuelve a activar, y se mueve la estación de corte hacia arriba hasta que el sistema de visión detecta un tallo lateral que tiene un ramillete de frutos;
i) se activan medios de corte en la estación de corte para cortar el tallo lateral, por lo que se separa del tallo el ramillete de frutos y se guía sobre un dispositivo de recogida;
j) se hace avanzar la estación de corte hacia arriba a lo largo del tallo para cortar los tallos que no tienen fruta;
k) la estación de corte abre la ranura vertical, y los medios de agarre liberan el tallo de nuevo a la posición del tallo en la fila;
l) el vehículo de recogida avanza hasta la siguiente planta que tiene fruta
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07115028.
Solicitante: EGATEC A/S.
Nacionalidad solicitante: Dinamarca.
Dirección: HVIDKERVEJ 23D,5250 ODENSE SV.
Inventor/es: BEISKJER,PEDER ZOEGA.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Agosto de 2007.
Fecha Concesión Europea: 3 de Febrero de 2010.
Clasificación Internacional de Patentes:
- A01D46/30 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › A01D 46/00 Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos. › Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
Clasificación PCT:
- A01D46/30 A01D 46/00 […] › Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento y vehículo de recogida para la recolección de cultivos que crecen en tallos.
Campo de la invención
La presente invención está dirigida a un procedimiento para la recolección de frutas y verduras, en particular frutas y verduras en ramilletes o racimos como tomates en ramillete, uvas y similares. Además, la invención también está dirigida a un vehículo de recogida, vehículo en el que hay dispuestos instrumentos para llevar a cabo de forma automática el procedimiento.
Antecedentes de la invención
Con el transcurso de los años, el cultivo de las frutas y de las verduras se ha vuelto cada vez más industrializado, de forma que se ha maximizado la producción de las plantas en relación al área/espacio que ocupa una planta y, al mismo tiempo, las condiciones de cultivo, es decir, tanto el clima como los nutrientes añadidos a la planta en la tierra, para poder crear las condiciones más favorables de crecimiento para las plantas, para aumentar la producción.
Para un número de frutas y verduras la recolección de estas verduras y frutas se ha industrializado, pero para un número de otras verduras y frutas el procedimiento de recolección se lleva a cabo mediante trabajo manual. Hay muchas razones para utilizar trabajo manual, porque las frutas/verduras se pueden recolectar de forma que es particularmente cuidadoso, de manera que no se dañen las frutas o las verduras durante el procedimiento de la recolección.
Para las verduras como los tomates en ramillete, las uvas, los pepinos, el calabacín y similares, el cultivo industrializado de estas plantas ha tenido como resultado un crecimiento muy uniforme y repetible, de forma que es posible aplicar medios automáticos a la recolección de estas verduras o frutas.
El documento US 2005/126 144 A1 da a conocer un sistema robótico de recogida de fruta utilizando medios de visión y de corte.
En la presente solicitud se hará referencia a verduras, porque la aplicación principal de la presente invención es para los tomates en ramillete, pero se contempla que se pueden utilizar el procedimiento al igual que el vehículo sin alejarse del alcance de protección según queda definido por las reivindicaciones adjuntas para otras verduras o frutas (cultivos) que exhiban las mismas características principales, es decir, un tallo sobre el que crecen las verduras o las frutas como frutas sueltas o en ramilletes, y las frutas o las verduras crecen en el tallo principal en tallos laterales.
Objetivo de la invención
Un objetivo de la presente invención es proporcionar un procedimiento para la recolección de frutas y verduras en el que se utiliza un vehículo de recogida en un procedimiento automático, de forma que se puede evitar por completo un trabajo manual y una interferencia.
Cuando se cultivan, por ejemplo, tomates en ramillete, las tomateras están dispuestas en un medio de cultivo en el que se suministra un medio fertilizante, agua y otros nutrientes en una tasa predeterminada para conseguir una producción y un crecimiento óptimos de los tomates. Normalmente, según crece la planta dentro de un invernadero, la planta estará soportada, por ejemplo, por un alambre tensor, de forma que la planta crecerá en una dirección sustancialmente vertical. Los tallos laterales que tienen la fruta se desarrollarán cerca de la parte superior de la planta, de forma que cuando se corta el ramillete de tomates del tallo lateral, es decir, por ejemplo al cortar el tallo lateral en relación al tallo principal, el tallo principal crecerá, desarrollará tres tallos laterales que solo desarrollarán hojas y a partir de entonces desarrollará un nuevo tallo lateral que tiene un ramillete de tomates. Según crece el tallo principal, es decir, el tallo se vuelve más largo desde la parte superior del tallo hasta las raíces dispuestas en el medio, se mantiene la parte superior de la planta sustancialmente a la misma altura por lo que el tallo principal desde el que los tomates ya han sido recogidos dispuesto, por ejemplo, en el suelo. Normalmente, las tomateras que desarrollan tomates en ramillete crecerán hasta una altura de 16-20 metros, pero en el cultivo industrializado de estos tomates, la mayoría de la longitud del tallo estará dispuesta en el suelo, de forma que la propia planta solo tendrá una altura de 3-4 metros.
Para otras verduras o frutas, el patrón de crecimiento puede ser distinto, pero la regularidad y el desarrollo sistemático de los tallos laterales, de las hojas y de las frutas/verduras tendrán un patrón similar o correspondiente de regularidad.
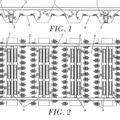
Volviendo a la cuestión del cultivo de tomates en ramillete, el medio de la planta, es decir, el medio en el que las tomateras desarrollarán sus raíces, está colocado con una distancia mutua de 30-40 cm entre cada tomatera. Las tomateras están dispuestas en largas filas en invernaderos, en los que cada fila está separada por un pasillo de acceso, de forma que el personal y los encargados puedan tener acceso a las plantas. Normalmente, todo el riego y el suministro de nutrientes, fertilizantes y similares están regulados por un sistema central y cada medio está conectado por medio de tuberías apropiadas a depósitos de los que se pueden suministrar los nutrientes, fertilizantes y agua necesarios.
Descripción de la invención
La invención se propone proporcionar un procedimiento para la recolección de frutas y verduras de forma que se pueda llevar a cabo el procedimiento de la recolección por una máquina, por lo tanto, de forma sustancialmente automática. Esto es proporcionado por un procedimiento para la recolección de frutas o verduras, en particular frutas y verduras en ramilletes o racimos como tomates en ramillete, uvas y similares. Además, la invención también está dirigida a un vehículo de recogida, vehículo en el que están dispuestos los instrumentos para llevar a cabo el procedimiento de forma automática.
Por lo tanto, la invención proporciona un procedimiento novedoso para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, en el que el procedimiento comprende las siguientes etapas:
Reivindicaciones:
1. Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, en el que el procedimiento comprende las siguientes etapas:
2. Un procedimiento conforme a la reivindicación 1, en el que después de la etapa f) el segundo medio de agarre también libera el tallo, y, además, se gira el segundo medio de agarre a un lado para permitir que la estación de corte se desplace hacia arriba, y que, en la etapa g), según se activa el sistema de visión, los datos de entrada del sistema de visión controlan la activación y opcionalmente la dirección del desplazamiento del dispositivo de recogida.
3. Un vehículo de recogida, adecuado para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos como tomates en ramillete, uvas y similares en el que dicho vehículo comprende
4. Un vehículo de recogida conforme a la reivindicación 3, en el que cada uno de los medios de agarre tiene forma de vástago, vástago en el que se proporcionan accionadores de agarre en un primer extremo, en el que dichos accionadores tienen forma de miembros alargados, miembros que se pueden mover desde una primera posición abierta, primera posición en la que los miembros alargados forman una V, teniendo su mayor abertura alejándose del vehículo de recogida, y una posición cerrada en la que los miembros alargados han cerrado sustancialmente la V, y en el que el vástago es amovible en una primera dirección horizontal, primera dirección en la que se mueven los medios de agarre alejándose del vehículo, y en el que además el vástago es amovible en una segunda dirección horizontal perpendicular a dicha primera dirección horizontal, y además en el que los medios primero y segundo de agarre están dispuestos en una estructura, estructura que es amovible en una dirección vertical con respecto al vehículo.
5. Un vehículo de recogida conforme a la reivindicación 3, en el que cada uno de los medios de agarre tiene forma de vástago, vástago en el cual se proporcionan accionadores de agarre en un primer extremo en el que dichos accionadores tienen forma de miembros alargados, miembros que pueden ser movidos desde una primera posición abierta, primera posición en la que los miembros alargados están dispuestos sustancialmente paralelos a una distancia entre los miembros, y una posición cerrada en la que los miembros alargados se han cerrado sustancialmente, bien al girar los extremos distales de los miembros alargados entre sí, o bien al deslizar los miembros alargados uno contra el otro, y en el que el vástago es amovible en una primera dirección horizontal, primera dirección en la que se mueven los medios de agarre alejándolos del vehículo, y en el que además el vástago es amovible en una segunda dirección horizontal perpendicular a dicha primera dirección horizontal, y además en el que los medios primero y segundo de agarre están dispuestos en una estructura, estructura que es amovible en una dirección vertical con respecto al vehículo.
6. Un vehículo de recogida conforme a la reivindicación 3, en el que la estación de corte comprende un cilindro central en la pared del cual hay dispuestos uno o más sujetadores en el que se pueden mover dichos sujetadores mediante medios de accionamiento desde una primera posición sustancialmente a nivel con la pared del cilindro hasta una segunda posición en la que los sujetadores engarzan un tallo presente dentro del cilindro central, en el que además los primeros medios de corte están dispuesto en un extremo superior de dicho cilindro central, en el que dichos primeros miembros de corte tienen forma de dientes que se proyectan hacia arriba, que tienen bordes afilados, y en el que un cilindro de corte está dispuesto de forma giratoria en el exterior de dicho cilindro central, en el que dicho cilindro de corte comprende dientes de corte que se proyectan hacia arriba, en el que dichos dientes tienen bordes afilados, y en el que se proporcionan aberturas entre los dientes que se proyectan tanto en el cilindro central como en el cilindro de corte, y en el que los medios de accionamiento pueden hacer girar el cilindro de corte con respecto al cilindro central, por lo que los dientes de corte se moverán desde una posición superpuesta en la que los dientes en un cilindro solapan los dientes en el otro cilindro, hasta una posición en la que los dientes de un cilindro cubren sustancialmente las aberturas entre los dientes en el otro cilindro.
7. Un vehículo de recogida conforme a la reivindicación 3 o 6, en el que hay dispuestas dos o más secciones de cono en torno al exterior de la estación de corte, y en el que se proporcionan una o más planchas próximas a dichas secciones de cono, para transferir objetos cortados por los medios de corte desde los medios de corte hasta los medios de recogida.
8. Un vehículo de recogida conforme a la reivindicación 3, en el que se proporciona un pulverizador, un cepillo o una esponja próximos al extremo superior de la estación de corte en el que dicho pulverizador, cepillo o esponja se encuentra en comunicación de líquidos con un depósito, y en el que se proporcionan medios adicionales bien para dirigir la boquilla del pulverizador hacia el lugar en el que los medios de corte han cortado la planta o para mover el cepillo o la esponja en contacto con el lugar en el que los medios de corte han cortado la planta.
9. Un vehículo de recogida conforme a cualquier reivindicación precedente, en el que el vehículo comprende dos cintas transportadoras dispuestas con un solapamiento en el que hay dispuesta una primera cinta transportadora bajo la estación de corte, de forma que se transportan los artículos/objetos cortados por los medios de corte sobre el primer transportador, en el que se puede hacer girar dicho primer transportador en direcciones opuestas en las que, en una primera dirección se transportan los objetos hacia el segundo transportador subyacente, y en una segunda dirección se transportan hacia una posición de desecho.
10. Un vehículo de recogida conforme a la reivindicación 3, en el que se proporcionan uno o más sensores en el que dichos sensores pueden comprender:
Patentes similares o relacionadas:
 Cosecha selectiva automatizada de cultivos, del 28 de Agosto de 2019, de Harvest Croo, LLC: Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato […]
Cosecha selectiva automatizada de cultivos, del 28 de Agosto de 2019, de Harvest Croo, LLC: Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato […]
 EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR, del 20 de Agosto de 2015, de FEDERACION NACIONAL DE CAFETEROS DE COLOMBIA: La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u […]
EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR, del 20 de Agosto de 2015, de FEDERACION NACIONAL DE CAFETEROS DE COLOMBIA: La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u […]
 Dispositivo y método para la separación de una parte de una cosecha, del 25 de Diciembre de 2013, de Prigrow Tomation B.V: Dispositivo para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprendeun portador provisto de medios de agarre para dicha […]
Dispositivo y método para la separación de una parte de una cosecha, del 25 de Diciembre de 2013, de Prigrow Tomation B.V: Dispositivo para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprendeun portador provisto de medios de agarre para dicha […]
 Método y dispositivo para la retirada de una hoja de una planta de cultivo, del 27 de Mayo de 2013, de Zeelen, Ronald: Método para la retirada de hojas de una planta de cultivo , que comprende la observación de una primerahoja de la planta de cultivo desde […]
Método y dispositivo para la retirada de una hoja de una planta de cultivo, del 27 de Mayo de 2013, de Zeelen, Ronald: Método para la retirada de hojas de una planta de cultivo , que comprende la observación de una primerahoja de la planta de cultivo desde […]
 MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS, del 3 de Enero de 2011, de SOLUCIONES ROBOTICAS AGRICOLAS SLU: Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada […]
MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS, del 3 de Enero de 2011, de SOLUCIONES ROBOTICAS AGRICOLAS SLU: Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada […]
 DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA, del 4 de Diciembre de 2009, de UNIVERSIDAD POLITECNICA DE MADRID: Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión […]
DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA, del 4 de Diciembre de 2009, de UNIVERSIDAD POLITECNICA DE MADRID: Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión […]
HELICOPTERO CONTROLADO REMOTAMENTE., del 1 de Noviembre de 2006, de MAFLEX S.R.L.: Aparato para recolectar aceitunas, bayas o bien otros frutos, o para llevar a cabo otras operaciones en follaje de plantas, tales como podado o rociado […]
 DISPOSITIVO PARA TRATAR PLANTAS DE CULTIVO QUE CRECEN EN TALLOS, del 1 de Mayo de 2008, de BEHEERSMAATSCHAPPIJ G.A. CH.M.: Dispositivo para tratar plantas de cultivo que crecen en tallos en un lecho de cultivo , siendo móviles entre sí el dispositivo y el lecho de cultivo, constando el dispositivo […]
DISPOSITIVO PARA TRATAR PLANTAS DE CULTIVO QUE CRECEN EN TALLOS, del 1 de Mayo de 2008, de BEHEERSMAATSCHAPPIJ G.A. CH.M.: Dispositivo para tratar plantas de cultivo que crecen en tallos en un lecho de cultivo , siendo móviles entre sí el dispositivo y el lecho de cultivo, constando el dispositivo […]