Mejoras de compensación de temperatura en aparato de radar.
Aparato de medición de distancias basado en radar que comprende:
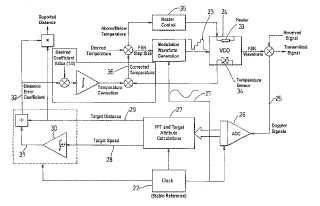
un circuito de microondas que comprende un generador de frecuencias (24) que produce una señal defrecuencia de microondas, cuya frecuencia se modula una cantidad determinada mediante una señal demodulación aplicada al generador de frecuencias (24),
un sensor de temperatura (34) que obtiene una medición de temperatura de al menos una parte del circuitode microondas y un regulador de frecuencia que está adaptado para regular la frecuencia generadamediante el generador de frecuencias, comprendiendo los medios de regulación de frecuencia uncalentador (33) que está adaptado para calentar el generador de frecuencias (24) una cantidad quedepende del valor de la señal de temperatura compensada, caracterizado porque:
el aparato comprende medios de compensación para compensar errores en la salida del sensor detemperatura (34) para producir una señal de temperatura compensada usando información derivada de laseñal de accionamiento (23) y una señal de eco detectada mediante un detector de microondas (12);los medios de regulación de frecuencia están adaptados para recibir la señal de temperatura compensada ypara regular la frecuencia de la señal generada mediante el generador de frecuencias (24), corrigiendo deeste modo al menos parcialmente el efecto de los cambios en la temperatura del generador de frecuencias(24),
el aparato incluye primeros medios de procesamiento (27) adaptados para determinar la velocidad relativadel aparato y el objetivo midiendo el desplazamiento Doppler entre la señal de accionamiento (23) y unaseñal de eco devuelta desde un objeto;
el aparato incluye segundos medios de procesamiento (27) adaptados para determinar la distancia de unobjetivo del aparato comparando el desplazamiento de fase entre las zonas de la señal de accionamiento(23) a cada lado del cambio de etapa en la frecuencia y las zonas correspondientes presentes en una señalde eco reflejada desde el objetivo detectado mediante el detector; y
el aparato incluye terceros medios de procesamiento que integran la velocidad entre dos momentosdiferentes en el tiempo y a partir de esto determina un primer valor de cambio en la distancia indicativo delcambio en la distancia entre el aparato de radar y la fuente de un eco entre estos dos instantes.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2003/005553.
Solicitante: TRW LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: STRATFORD ROAD SOLIHULL, WEST MIDLANDS B90 4AX REINO UNIDO.
Inventor/es: TAYLOR,BRIAN KEITH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/58 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G01S7/35 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Detalles de sistemas no de pulsos.
- G01S7/40 G01S 7/00 […] › Medios para monitorización o calibración.
- H03L1/02 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03L CONTROL AUTOMATICO, ARRANQUE, SINCRONIZACION O ESTABILIZACION DE GENERADORES DE OSCILACIONES O DE IMPULSOS ELECTRONICOS (de generadores dinamoeléctricos H02P). › H03L 1/00 Estabilización de la señal de salida del generador contra las variaciones de valores físicos, p. ej. de la alimentación de energía (control automático H03L 5/00, H03L 7/00). › contra las variaciones de temperatura solamente.
- H03L1/04 H03L 1/00 […] › Detalles estructurales destinados a mantener la temperatura constante.
PDF original: ES-2426494_T3.pdf
Fragmento de la descripción:
Mejoras de compensación de temperatura en aparato de radar
Esta invención se refiere a mejoras en aparato de radar usando componentes de frecuencia de microondas, y en particular a un circuito de radar, que incorpora compensación de temperatura para componentes de microondas.
Se conoce el uso de radar en la medición de distancia. En una aplicación la radiación en la zona de microondas del espectro se emite desde una fuente hacia un objetivo. El objetivo reflejará algo de esta radiación de vuelta hacia un detector, que es sensible a la radiación en la zona de microondas del espectro. Un circuito electrónico, que puede incluir un procesador de señales digitales, se usa entonces para realizar una comparación entre la señal emitida y la señal medida, detectada a partir de la que puede compararse el intervalo del objetivo de la fuente/detector.
Se conoce proporcionar un esquema de clave de desplazamiento de frecuencia para determinar el intervalo a partir de las señales. En una aplicación de vehículo, en la que los “objetivos” son otros vehículos, que preceden al vehículo en el que está instalado el aparato de radar, se realizan observaciones de los vehículos a medida que se mueven a lo largo de la carretera. El movimiento de estos vehículos se sigue a lo largo del tiempo para proporcionar una visión coherente de su distribución variable con el tiempo de ahora en adelante. Para conseguir esto el radar estima cada intervalo y velocidad relativa del vehículo a partir de las señales de microondas.
Más precisamente, puede medirse la distancia a partir de la diferencia de fase que se observa en la señal devuelta cuando la señal emitida se modula por un cambio de etapa pequeño en la frecuencia tal como viene dada por:
donde c es la velocidad de la luz, !, es la fase relativa de las señales Doppler devueltas por dos frecuencias separadas por fs, el tamaño de etapa de frecuencia. La precisión de la medición está relacionada con el tamaño de etapa de frecuencia.
De manera similar, la velocidad relativa puede medirse observando el desplazamiento Doppler entre la señal emitida y la señal recibida tal como viene dada por la siguiente expresión:
donde c es la velocidad de la luz, f0 es la frecuencia de portadora y fD es el desplazamiento Doppler.
Como la frecuencia de portadora se regula mediante un resonador sumamente preciso en los componentes de microondas, es muy estable y las mediciones de velocidad son sumamente precisas.
Un problema con tal aparato es que las variaciones en la temperatura del generador de frecuencias de microondas provoca errores en la estimación de la distancia de vehículos objetivo. Esto se ha resuelto en el pasado proporcionando un calentador para regular la temperatura del generador de frecuencias y en particular para elevar su temperatura hasta una zona ideal u objetivo en la que los coeficientes de temperatura de los componentes son lineales para permitir que se apliquen correcciones de bucle abierto a la modulación. Se usa un sensor de temperatura para proporcionar la información necesaria para accionar estos circuitos de control.
Se ha constatado que basarse en un sensor de temperatura en un esquema de este tipo puede dar como resultado un rendimiento insatisfactorio tras un uso prolongado en ambientes adversos debido a los efectos de envejecimiento significativos en el sensor de temperatura.
Se conoce el documento US 6 317 076 B1 que da a conocer un aparato de medición de distancias basado en radar que tiene las características de la parte precaracterizadora de la reivindicación 1. El aparato dado a conocer se basa en una salida precisa de un sensor de temperatura. El solicitante ha apreciado que a lo largo del tiempo esta salida puede volverse poco precisa.
Según un primer aspecto la invención proporciona un aparato de medición de distancias basado en radar según la reivindicación 1. Se mencionan características opcionales en las reivindicaciones dependientes.
Debido a que los medios de compensación modifican la salida del sensor de temperatura en un bucle cerrado usando información derivada de una señal de eco, los medios de regulación de frecuencia pueden regular la salida de frecuencia mediante el generador de frecuencias-manteniéndola tan próxima como sea posible a un valor constante ideal-a pesar de los cambios en su temperatura. Adicionalmente, los medios de compensación permiten que el aparato corrija el efecto de envejecimiento del sensor de temperatura o similar. Esto no es posible en los sistemas de bucle abierto de la técnica anterior en los que simplemente se supone que la salida del sensor de temperatura es correcta durante toda su vida útil.
Los medios de regulación de frecuencia pueden comprender un calentador que está adaptado para calentar el generador de frecuencias una cantidad que depende del valor de la señal de temperatura compensada. Se sabe que los generadores de frecuencias de microondas producen una frecuencia que varía con la temperatura. El calentador puede comprender un elemento de calentamiento por resistencia. Este puede acoplarse al oscilador usando un compuesto de adaptación térmica. La temperatura corregida puede compararse con una temperatura de referencia. Si el oscilador está por encima de la temperatura de referencia-tal como se indica mediante el valor de temperatura corregida, el calentador puede apagarse. Si está por debajo puede encenderse.
Alternativamente, los medios de regulación de frecuencia pueden modificar la señal de modulación aplicada al generador de frecuencias según el valor de la señal de temperatura compensada. Por ejemplo, si la temperatura compensada está a o próxima a una temperatura ideal entonces no puede aplicarse ninguna modificación de la señal de accionamiento, aumentando la cantidad de modificación de la señal de modulación a medida que la temperatura compensada se aleja más de la ideal. Por tanto, puede alterar el tamaño de las etapas de frecuencia solicitadas desde el generador de frecuencias. Esto es especialmente útil si el generador está demasiado caliente y por encima de la temperatura de referencia, una condición que no puede corregirse mediante un calentador. Al cambiar los tamaños de etapa solicitados es posible provocar que el generador produzca los tamaños de etapa correctos en la señal de modulación incluso cuando la temperatura provoca que el generador de frecuencias trabaje incorrectamente.
Por supuesto, la invención puede incluir una combinación de calentamiento/enfriamiento y modificación de la señal de modulación como manera de regular la salida de frecuencia desde el generador de frecuencias.
El aparato puede incluir primeros medios de procesamiento adaptados para determinar la distancia de un objetivo del aparato comparando el desplazamiento de fase entre las zonas de la señal de modulación a cada lado del cambio de etapa en la frecuencia y las zonas correspondientes en una señal de eco reflejada desde el objetivo detectado mediante el detector. Puede producirse una lectura cada ciclo computacional del radar.
El aparato también puede incluir segundos medios de procesamiento adaptados para determinar la velocidad relativa del aparato y el objetivo midiendo el desplazamiento Doppler entre la señal de modulación y una señal de eco devuelta desde un objeto. Puede producirse una lectura cada ciclo computacional del radar.
Los terceros medios de procesamiento pueden determinar un primer valor de cambio en la distancia usando las mediciones de distancia obtenidas directamente tomadas en estos dos momentos en el tiempo.
Pueden proporcionarse cuartos medios de procesamiento que integran la velocidad medida entre dos momentos diferentes en el tiempo y a partir de esto determina un segundo valor de cambio en la distancia indicativo del cambio en la distancia entre el aparato de radar y la fuente de un eco entre estos dos instantes.
Los medios de procesamiento primero, segundo, tercero y cuarto pueden formar parte de un único circuito integrado. Alternativamente, el aparato puede incluir un procesador y una memoria que almacena instrucciones de programa que provocan que el procesador lleve a cabo las funciones de los medios de procesamiento primero, segundo, tercero y cuarto.
Pueden proporcionarse medios de comparación que están adaptados para comparar los valores de cambio en la distancia primero y segundo para producir un valor de error. Este puede alimentarse a los medios de compensación que a su vez están adaptados para corregir la salida de señal de temperatura del sensor de temperatura una cantidad que depende de la magnitud y el signo del valor de error.
El sensor de temperatura puede comprender, por ejemplo,... [Seguir leyendo]
Reivindicaciones:
1. Aparato de medición de distancias basado en radar que comprende:
un circuito de microondas que comprende un generador de frecuencias (24) que produce una señal de frecuencia de microondas, cuya frecuencia se modula una cantidad determinada mediante una señal de 5 modulación aplicada al generador de frecuencias (24) ,
un sensor de temperatura (34) que obtiene una medición de temperatura de al menos una parte del circuito de microondas y un regulador de frecuencia que está adaptado para regular la frecuencia generada mediante el generador de frecuencias, comprendiendo los medios de regulación de frecuencia un calentador (33) que está adaptado para calentar el generador de frecuencias (24) una cantidad que depende del valor de la señal de temperatura compensada, caracterizado porque:
el aparato comprende medios de compensación para compensar errores en la salida del sensor de temperatura (34) para producir una señal de temperatura compensada usando información derivada de la señal de accionamiento (23) y una señal de eco detectada mediante un detector de microondas (12) ;
los medios de regulación de frecuencia están adaptados para recibir la señal de temperatura compensada y
para regular la frecuencia de la señal generada mediante el generador de frecuencias (24) , corrigiendo de este modo al menos parcialmente el efecto de los cambios en la temperatura del generador de frecuencias (24) ,
el aparato incluye primeros medios de procesamiento (27) adaptados para determinar la velocidad relativa del aparato y el objetivo midiendo el desplazamiento Doppler entre la señal de accionamiento (23) y una señal de eco devuelta desde un objeto;
el aparato incluye segundos medios de procesamiento (27) adaptados para determinar la distancia de un objetivo del aparato comparando el desplazamiento de fase entre las zonas de la señal de accionamiento (23) a cada lado del cambio de etapa en la frecuencia y las zonas correspondientes presentes en una señal de eco reflejada desde el objetivo detectado mediante el detector; y
el aparato incluye terceros medios de procesamiento que integran la velocidad entre dos momentos diferentes en el tiempo y a partir de esto determina un primer valor de cambio en la distancia indicativo del cambio en la distancia entre el aparato de radar y la fuente de un eco entre estos dos instantes.
2. Aparato de radar según la reivindicación 1, en el que los medios de regulación de frecuencia modifican la señal de modulación (23) aplicada al generador de frecuencias (24) según el valor de la señal de 30 temperatura compensada.
3. Aparato según la reivindicación 1 o la reivindicación 2, que comprende cuartos medios de procesamiento que determinan un segundo valor de cambio en la distancia usando las mediciones de distancia obtenidas directamente tomadas en estos dos momentos en el tiempo.
4. Aparato según la reivindicación 3, en el que los medios de procesamiento primero, segundo, tercero y 35 cuarto forman parte de un único circuito integrado.
5. Aparato según la reivindicación 3, en el que el aparato incluye un procesador y una memoria que almacena instrucciones de programa que provocan que el procesador lleve a cabo las funciones de los medios de procesamiento primero, segundo, tercero y cuarto.
6. Aparato según la reivindicación 3, 4 ó 5, que incluye además medios de comparación que están adaptados
para comparar los valores de cambio en la distancia primero y segundo para producir un valor de error, y para alimentar el valor de error a los medios de compensación que están adaptados para corregir la salida de señal de temperatura del sensor de temperatura (34) una cantidad que depende de la magnitud y el signo del valor de error.
7. Aparato según la reivindicación 4, que está adaptado para producir un valor de distancia notificado siempre 45 que se realiza una lectura de distancia mediante los primeros medios de procesamiento combinando la lectura con el valor de error producido por el comparador.
Patentes similares o relacionadas:
Dispositivo de procesamiento de imagen y procedimiento de procesamiento de imagen correspondiente, del 12 de Febrero de 2020, de Microwave Characterization Center: Dispositivo de procesamiento de imagen caracterizado porque comprende: - un primer conjunto de sensores de hiperfrecuencias, con preferencia radiométricos, estando […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
 Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
Radar meteorológico, del 10 de Julio de 2019, de LEONARDO Germany GmbH: Radar meteorológico para medir señales de radar en el rango de GHz con un receptor que contiene al menos una ruta de señal , y que comprende un […]
Linealizador de forma de onda, del 12 de Junio de 2019, de MBDA UK LIMITED: Una fuente de barrido de frecuencia para un radar FMCW que comprende un sintetizador de frecuencia de bucle de bloqueo de fase, incluyendo el bucle bloqueado […]
Procedimiento de localización de un blanco y sistema radar multiestático de implementación de tal procedimiento, del 14 de Marzo de 2019, de THALES: Procedimiento de localización de un blanco que incluye las siguientes etapas: a) recibir, por medio de N≥1 receptores (RR1, RR2, RR3), […]