DISPOSITIVO PARA EL SEGUIMIENTO REMOTO DE MASAS DE AGUA Y PROCEDIMIENTO DE GESTIÓN Y OPERACIÓN REMOTAS Y SIMULTÁNEAS DE UN CONJUNTO DE DICHOS DISPOSITIVOS.
Dispositivo para el seguimiento remoto de masas de agua y procedimiento de gestión y operación remotas y simultáneas de un conjunto de dichos dispositivos.
Dispositivo de seguimiento remoto de masas de agua mediante un dispositivo de posicionamiento GPS dotado de un módem de telecomunicaciones y una placa de control electrónico, lo que de aquí en adelante será denominado "localizador GPS", encerrado en el interior de un recipiente flotante y estanco, lo que de aquí en adelante se denominará "flotador", así como al procedimiento de gestión y operación simultánea de un conjunto de uno o varios de dichos dispositivos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130980.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC).
Nacionalidad solicitante: España.
Inventor/es: GARCÍA CRUZ,Raúl, GUTIÉRREZ ROYO,Francisco Javier, NAVARRO ALMENDROS,Gabriel, RUIZ SEGURA,Javier Tomás.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B22/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Boyas (medios para señalar el emplazamiento de objetos sumergidos B63C 7/26; boyas salvavidas, p. ej. en forma de corona B63C 9/08).
- G01S5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
- G08B25/10 G […] › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › G08B 25/00 Sistemas de alarma en los que el emplazamiento del lugar donde existe la condición que acciona la alarma es señalado a una estación central, p. ej. sistemas telegráficos de incendio o de policía. › utilizando sistemas de transmisión sin hilos.
Fragmento de la descripción:
DISPOSITIVO PARA EL SEGUIMIENTO REMOTO DE MASAS DE AGUA Y
PROCEDIMIENTO DE GESTIÓN Y OPERACIÓN REMOTAS Y SIMULTÁNEAS
DE UN CONJUNTO DE DICHOS DISPOSITIVOS
5 OBJETO DE LA INVENCIÓN
La presente invención, tal y como se expresa en el
enunciado de esta memoria descriptiva, se refiere a un
dispositivo de seguimiento remoto de masas de agua mediante
un dispositivo de posicionamiento GPS dotado de un módem de
1 O telecomunicaciones y una placa de control electrónico, lo
que de aqui en adelante será denominado "localizador GPS",
encerrado en el interior de un recipiente flotante y
estanco, lo que de aqui en adelante se denominará
"flotador", a si como al procedimiento de gestión y
15 operación simultánea de un conjunto de uno o varios de
dichos dispositivos.
Asi, la invención se enmarca dentro del campo del
seguimiento de vertidos, como pueden ser hidrocarburos o
contaminantes, del marcado rápido de masas de agua para el
20 seguimiento de los restos de un naufragio durante las
labores de rescate mari timo, del seguimiento de enjambres
nocivos de organismos marinos, de la caracterización
lagrangiana de corrientes y de la localización de fondeos.
ANTECEDENTES DE LA INVENCIÓN
25 Entre los productos que existen actualmente en el
mercado para realizar el seguimiento de masas de agua
superficiales por medio de localizadores GPS se encuentran:
boya MD02 de la empresa Albatros Marine Technologies, boya
modelos SVP y Microstar de la empresa Pacific Gyre, boyas
30 de la serie SVP de la empresa Metocean, boya TRBUOY de la
empresa Marexi, boya MLi de la empresa Marine Instruments,
boya ClearSat-1 de la empresa Clearwater y boya ArgoDrifter
de la empresa Technocean. También existen o han existido
modelos no comerciales (Austin et al., 2004; Gutiérrez et al. 2009) que han sido construidos para uso propio, sin propósitos comerciales.
Principalmente, estos dispositivos se utilizan para caracterizar la dinámica lagrangiana de una determinada masa de agua. Esto es útil para generar bancos de datos para alimentar y/o validar modelos de dinámica de fluidos computacional (Salman et al. 2006) , para realizar la calibración/validación de estaciones de radar HF para la medida de corrientes superficiales (Ohlmann et al. 2006) y para realizar el seguimiento de vertidos en el mar (Goodman et al. 1995) , entre otras aplicaciones.
También existen dispositivos flotantes con propósitos diferentes, pero cuya geometría se puede considerar el estado de la técnica más próximo en relación a la invención
que se presenta en esta memoria. Es el caso de los
flotadores de las luces de salvamento.
En cuanto al diseño, los principales requisitos son
que el dispositivo sea capaz de seguir fielmente el
movimiento de la parcela de agua en que se encuentra inmerso y que pueda enviar su posición regularmente a un servidor remoto. A este respecto, existen numerosas referencias en la literatura que permiten entender cómo debe abordarse el diseño y construcción de estos dispositivos para garantizar estos requisitos (Chereskin et al. 1989, Kirwan et al. 1975 y 1978, Niiler et al. 1987 y 1995, Ohlman et al. 2005, Sybrandy et al. 2009) y cómo estos dispositivos deben validarse y/o calibrarse en campo (Gasser et al. 2001, Geyer et al. 1989)
En cuanto a la gestión y operación remotas de dichos dispositivos, el único documento conocido en el estado de la técnica para gestionar y operar este tipo de dispositivo es el manual de usuario en inglés, más completo que elespañol, de la boya MD02, donde no se encuentra ningún elemento que ponga en entredicho la novedad del procedimiento que en esta memoria se describe.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención consiste en un dispositivo de seguimiento remoto de masas de agua, como el descrito en la sección "Objeto de la invención", cuyo flotador presenta una serie de novedades y ventajas técnicas con respecto al estado de la técnica actual, así como en un procedimiento de gestión y operación remotas y simultáneas de un conjunto de al menos uno de esos dispositivos.
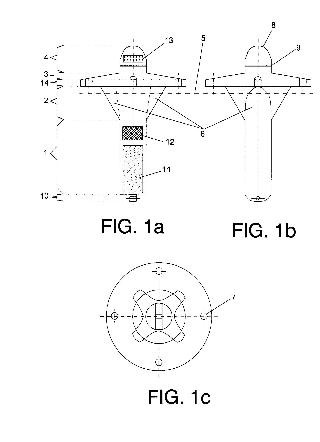
En relación a la geometría para el flotador de los dispositivos de seguimiento de las masas de agua, en ella se distinguen los siguientes espacios o cavidades, descritas ordenadamente de abajo hacia arriba:
-un cilindro inferior cuya finalidad es la de alojar en su extremo inferior los elementos más pesados, principalmente los acumuladores de energía, para que el centro de masas de la boya quede por debajo de la línea de flotación y lo más separado posible de ésta; opcionalmente, incorpora en su extremo inferior un apéndice perforado para el anclaje de accesorios. El exceso de flotabilidad inducido por el espacio vacío de este cilindro se compensa con las concavidades que se describen en el segundo espacio
una segunda cavidad, esencialmente tronco-cónica invertida, para dotar a la boya de mayor estabilidad frente a desplazamientos fuera de la vertical comparado con otras geometrías (esférica, cilíndrica y elipsoidal) . El posible exceso de flotabilidad introducido por el espacio vacío en la parte superior del primer espacio y de éste segundo se compensa con la incorporación de concavidades alrededor de la superficie exterior de esta cavidad que reducen la cantidad de agua desplazada por el flotador al ser
sumergido en un fluido. En este espacio, pueden ir alojados la mayoría de los elementos electrónicos de la boya, aunque algunos de ellos, los más pesados, también pueden ir inmediatamente por encima de los elementos de acumulación de energía
-el tercer espacio, ya sobre la línea de flotación, consta esencialmente de otra plataforma tronco-cónica, de diámetro mayor superior o igual al diámetro mayor del segundo espacio. Opcionalmente, puede existir un espacio cilíndrico entre los espacios segundo y tercero cuyo diámetro es igual al diámetro mayor del tronco-cono des espacio dos. Esta parte de la geometría dificulta que la boya se hunda en caso de fuerte oleaje, actuando de freno frente a oscilaciones y/o esfuerzos verticales. También puede servir de soporte para alojar elementos de captación de energía ambiental, en caso de optar por este tipo de alimentación autónoma. Por cada una de las concavidades del espacio segundo, existe, al menos, una perforación estanca
en el flotador, que atraviesa los espacios segundo y
tercero, para facilitar el anclaje de accesorios
el cuarto espacio se dedica, principalmente, a
albergar la antenas de recepción de la señal GPS y la de
comunicaciones. Su tamaño debe ser lo más pequeño posible, compatible con el tamaño de las antenas, para evitar que el rozamiento con el viento degrade el seguimiento de la parcela de agua por parte del dispositivo de seguimiento. Finalmente, la estanqueidad del flotador se logra por medio de un tapón y una junta.
En relación al dispositivo, la propuesta de la presente invención proporciona las siguientes mejoras técnicas fundamentales con respecto a estos dispositivos:
PRIMERA, se alejan sustancialmente de la línea de flotación los elementos que almacenan y proporcionan energía al localizador GPS, generalmente los elementos más pesados, de las cavidades que proporcionan la flotabilidad al conjunto, alargando la cavidad que los encierra. De esta manera, el centro de gravedad de todo el conjunto se aleja más de la línea de flotación que en cualquiera de los modelos existentes y, por ello, se mejora la estabilidad del diseño frente a desplazamientos fuera de la vertical inducidos por el viento y/o el oleaje y; como contrapartida, el espacio vacío que se introduce aporta flotabilidad adicional al conjunto, pero esta es compensada a través de la segunda mejora técnica que se describe en el siguiente párrafo. Al aumentarse el tamaño de esta cavidad, también se aumenta la cantidad de elementos de acumulación de energía que pueden añadirse al dispositivo y, por ende, la autonomía del mismo. Así, se aumenta el espacio para alojar baterías, por lo que se aumenta la autonomía de la boya en caso de no utilizar ningún elemento de generación eléctrica.SEGUNDA, al espacio que da flotabilidad al conjunto, que tiene una geometría esencialmente tronco-cónica invertida, se le incorporan unas concavidades que reducen el volumen de agua desalojado por este espacio y cuyas dimensiones permiten compensar el exceso de flotabilidad introducido por el espacio vacío mencionado en el párrafo anterior; de esta manera, se introduce una segunda ventaja técnica que es la mayor versatilidad de que se dispone para elegir las dimensiones...
Reivindicaciones:
1. Dispositivo de seguimiento remoto de masas de agua, que comprende al menos un módem GPS, una antena GPS, un módem de telecomunicaciones, una antena de telecomunicaciones, unos módulos de almacenamiento de energía y un módulo de gestión de la boya, todos ellos encerrados en un flotador estanco caracterizado porque al menos comprende:
• un cilindro inferior abierto en su borde superior, para alojar los módulos de almacenamiento de energía;
• un primer cuerpo tronco-cónico con el extremo de menor diámetro unido al borde superior del cilindro inferior, que comprende al menos tres concavidades en su cara externa;
• un segundo cuerpo tronco-cónico con el extremo de mayor diámetro unido al extremo de mayor diámetro del primer cuerpo tronco-cónico;
• un disco para unir el extremo de mayor diámetro de la primera forma tronco-cónica con el extremo libre de la porción cilíndrica; y,
elemento cilíndrico con su extremo superior
• un abombado y unido por su extremo inferior al extremo de menor diámetro de la segunda forma tronco-cónica, donde se aloja la antena de recepción GPS y la antena de telecomunicaciones; estando alojados el módem GPS, el módem de telecomunicaciones y el módulo de gestión de la boya en un espacio existente entre las antenas y los módulos de almacenamiento de energía.
2. Dispositivo de seguimiento, según la
reivindicación 1, caracterizado porque comprenden unirse los extremos de mayor diámetro del primer y segundo cuerpo troncocónico mediante la interposición de un cuerpo cilíndrico.
3. Dispositivo de seguimiento, según la reivindicación 1, caracterizado porque el extremo de mayor diámetro del segundo cuerpo tronco-cónico comprende ser de mayor diámetro que el extremo de mayor diámetro del primer cuerpo tronco-cónico uniéndose ambos extremos mediante un cuerpo anular.
4. Dispositivo de seguimiento, según la reivindicación 1, caracterizado porque el elemento cilíndrico comprende al menos un tapón y al menos una junta para asegurar la estanqueidad del flotador de boya.
5. Dispositivo de seguimiento, según la reivindicación 1, caracterizado porque comprende un orificio en la cara superior del segundo cuerpo tronco-cónico en correspondencia con cada una de las al menos concavidades del primer cuerpo tronco-cónico, para el anclaje de accesorios.
6. Dispositivo de seguimiento, según la reivindicación 1, caracterizado porque comprende tener un apéndice perforado en la cara inferior del cilindro inferior para el anclaje de accesorios.
7. Dispositivo de seguimiento, según la reivindicación 1, caracterizado porque las paredes del elemento cilíndrico son al menos un 50% más largas que el diámetro mayor de la parte abombada para alejar las antenas de la línea de flotación de la boya.
8. Dispositivo de seguimiento, según la reivindicación 1, caracterizado porque la cara externa del segundo cuerpo tronco-cónico comprende integrar elementos de captación en energía ambiental conectadas a los módulos de almacenamiento de energía.
9. Procedimiento de gestión y operación remota y simultánea de un conjunto de dispositivos de seguimiento de masas de agua de los descritos en una cualquiera de las reivindicaciones 1 a 8, que comprende hacer uso de:
-al menos un dispositivo de seguimiento, un centro de gestión y operación remoto, que a su vez comprende al menos un equipo informático con acceso a Internet y medios de comunicación inalámbricas, medios de almacenamiento de la información, una interfaz de usuario para al menos un operario local y al menos un dispositivo electrónico de envío y recepción de notificaciones de al menos un operario remoto; y,
una jerarquía de prioridades y un conjunto de unidades de información básica que tienen asignadas un nivel de prioridad dentro de la jerarquía de prioridades.
10. Procedimiento, según reivindicación 9, caracterizado porque la jerarquía de prioridades comprende un máximo de tres niveles que son:
• nivel de prioridad PI, relativo a una información que
debe ser intercambiada en tiempo real;
• nivel de prioridad P2, relativo a una información
intercambiada cuya recepción debe estar garantizada,
permitiéndose un lapso de tiempo previamente definido entre el envío y la recepción de la misma; y,
• nivel de prioridad P3, relativo a la información en la que la recepción por parte de otros elementos puede no estar garantizada pero de cuya recepción o no el emisor debe tener constancia para poder decidir volver a enviarla o no con posterioridad.
II. Procedimiento, según la reivindicación caracterizado porque comprende las siguientes fases,
• enviar de una petición de accesibilidad, con un nivel de prioridad PI desde el centro de gestión y operación remoto hasta al menos un dispositivo de seguimiento para determinar si está accesible; y,
• enviar una respuesta con un nivel de prioridad PI desde el dispositivo de seguimiento confirmando la accesibilidad del dispositivo de seguimiento.
I2. Procedimiento, según la reivindicación caracterizado porque comprende las siguientes fases:
• enviar desde el centro de gestión y operación
remoto una petición de parámetros, con un nivel de
prioridad PI, a al menos un dispositivo de
seguimiento; y,
• enviar una respuesta a la petición de
parámetros, con un nivel de prioridad P2, por parte de el al menos un dispositivo que ha recibido la anterior petición al centro de gestión y operación remoto, conteniendo los valores de los parámetros solicitados.
13. Procedimiento, según la reivindicación 10, caracterizado porque comprende las siguientes fases:
• enviar desde el centro de gestión y operación
remoto una petición de parámetros, con un nivel de
prioridad P2, a al menos un dispositivo de
seguimiento; y,
• enviar una respuesta a dicha petición, con un
nivel de prioridad P2, por parte del al menos un
dispositivo que ha recibido la anterior petición al
centro de gestión y operación remoto, conteniendo los valores de los parámetros solicitados.
14. Procedimiento, según una cualquiera de las reivindicaciones 12 y 13, caracterizado porque los parámetros solicitados por el centro de gestión operación remoto están seleccionados entre unas variables generadas por el módem GPS, una temperatura interior del dispositivo de seguimiento, un nivel de alimentación del dispositivo y una combinación de los mismos.
15. Procedimiento, según la reivindicación 10, caracterizado porque comprende enviar periódicamente desde al menos un dispositivo de seguimiento unos parámetros registrados por el dispositivo, con un nivel de prioridad seleccionado entre un nivel de prioridad P2 y un nivel de prioridad P3, al centro de gestión y operación remoto.
. -Procedimiento, según la reivindicación 15, caracterizado porque los parámetros enviados periódicamente por el al menos un dispositivo están seleccionados entre unas variables generadas por el módem GPS, una temperatura interior del dispositivo de seguimiento, un nivel de alimentación del dispositivo y una combinación de los mismos.
17. Procedimiento, según una cualquiera de las reivindicaciones 9 a 16, caracterizado porque comprende las siguientes fases:
• enviar desde el centro de gestión y operación remoto una petición de cambio de la configuración del dispositivo, con un nivel de prioridad P2, a al menos un dispositivo de seguimiento;
• enviar una confirmación de cambio de configuración por parte del al menos un dispositivo que ha recibido la anterior petición al centro de gestión, con un nivel de prioridad P2.
18. Procedimiento, según la reivindicación 17, caracterizado porque la petición de cambio de configuración del dispositivo comprende ser una petición seleccionada entre:
una petición de cambio de configuración de una cadencia de registro de unas variables generadas por el modem GPS;
una petición de cambio de configuración de una cadencia de registro de la temperatura interna del dispositivo;
una petición de cambio de configuración de una cadencia del envío de los parámetros enviados periódicamente por el al menos un dispositivo al centro de gestión y operación remoto;
una petición de cambio de configuración de un umbral mínimo de alimentación del dispositivo; una petición de cambio de configuración de un umbral medio de alimentación del dispositivo;
una petición de cambio de configuración de un umbral máximo de temperatura del interior del dispositivo;
una petición de cambio de configuración de un umbral medio de temperatura del interior del dispositivo;
una petición de cambio de configuración de un umbral máximo de velocidad del dispositivo;
una petición de cambio de configuración de un contorno cerrado para delimitar una zona geográfica de interés cuando el dispositivo sale de la zona geográfica;
una petición de cambio de configuración de un
contorno cerrado para delimitar una zona geográfica de
interés cuando el dispositivo entra en la zona
geográfica; y,
una combinación de los anteriores.
19. Procedimiento, según una cualquiera de las reivindicaciones 9 a 18, caracterizado porque comprende las siguientes fases:
• enviar desde el centro de gestión y operación remoto una petición de cambio de configuración del dispositivo, con un nivel de prioridad P3, a al menos un dispositivo de seguimiento;
• enviar una confirmación de cambio de configuración por parte del al menos un dispositivo que ha recibido la anterior petición al centro de gestión, con un nivel de prioridad P3.
20. Procedimiento, según la reivindicación 19, caracterizado porque la petición de cambio de configuración del dispositivo comprende ser una petición seleccionada entre:
una petición de cambio de configuración de una cadencia de registro de unas variables generadas por el modem GPS;
una petición de cambio de configuración de una cadencia de registro de la temperatura interna del flotador
una petición de cambio de configuración de una cadencia del envío de los parámetros enviados periódicamente por el al menos un dispositivo al centro de gestión y operación remoto;
una petición de cambio de configuración de un umbral mínimo de alimentación del dispositivo; una petición de cambio de configuración de un umbral medio de alimentación del dispositivo;
una petición de cambio de configuración de un umbral máximo de temperatura del interior del dispositivo;
una petición de cambio de configuración de un umbral medio de temperatura del interior del dispositivo;
una petición de cambio de configuración de un umbral máximo de velocidad del dispositivo;
una petición de cambio de configuración de un contorno cerrado para delimitar una zona geográfica de interés cuando el dispositivo sale de la zona geográfica;
una petición de cambio de configuración de un
contorno cerrado para delimitar una zona geográfica de
interés cuando el dispositivo entra en la zona
geográfica; y¡
una combinación de los anteriores.
2l. -Procedimiento, según la reivindicación 10, caracterizado porque comprende generar eventos críticos en el al menos un dispositivo de seguimiento y enviarlos, con un nivel de prioridad PI, al centro de gestión y operación remoto.
22. Procedimiento, según la reivindicación 21, caracterizado por generar un evento crítico cuando se produce una circunstancia seleccionada entre:
el nivel de alimentación del dispositivo está por
debajo de un umbral de alimentación mínimo;
la temperatura interna del dispositivo está por
encima de un umbral de temperatura máximo;
la velocidad del dispositivo está por encima de un umbral de velocidad máxima;
el dispositivo sale de una región geográfica previamente delimitada por el usuario local;
el dispositivo se adentra de una región geográfica previamente delimitada por el operario local; y,
una combinación de los anteriores.
23. Procedimiento, según la reivindicación 10, caracterizado porque comprende generar eventos críticos en el al menos un dispositivo de seguimiento y enviarlos, con un nivel de prioridad P2, al centro de gestión y operación remoto.
24. Procedimiento, según la reivindicación 23, caracterizado por generar un evento crítico cuando se produce una circunstancia seleccionada entre:
el nivel de alimentación del dispositivo está por
debajo de un umbral de alimentación mínimo; la temperatura interna del dispositivo está por encima de un umbral de temperatura máximo; la velocidad del dispositivo está por encima de un umbral de velocidad máxima; el dispositivo sale de una región geográfica previamente delimitada por el operario local;
el dispositivo se adentra de una región
geográfica previamente delimitada por el usuario
local; Yr
una combinación de los anteriores.
25. Procedimientor según una cualquiera de las reivindicaciones 9 a 24r caracterizado porque comprende generar eventos no críticos en el al menos un dispositivo de seguimiento y enviarlos r con un nivel de prioridad P2 r al centro de gestión y operación remoto.
26. Procedimientor según la reivindicación 25 r caracterizado por generar un evento no crítico cuando se produce una circunstancia seleccionada entre:
la temperatura interna del dispositivo pasa a estar entre los umbrales de temperatura medio y máximo; Yr el voltaje de alimentación del dispositivo pasa a estar entre los umbrales de voltaje medio y mínimo.
27. Procedimientosegún una cualquiera de las
r
reivindicaciones 9 a 26 r caracterizado porque comprende generar eventos no críticos en el al menos un dispositivo de seguimiento y enviarlos con un nivel de prioridad P3 r
r
al centro de gestión y gestión remoto.
28. Procedimiento, según la reivindicación 27, caracterizado por generar un evento no critico cuando se produce una circunstancia seleccionada entre:
la temperatura interna del flotador pasa a estar entre los umbrales de temperatura medio y máximo; y, el voltaje de alimentación del dispositivo pasa a estar entre los umbrales de voltaje medio y minimo.
29. Procedimiento, según la reivindicación 22, caracterizado porque comprende reasignar el nivel de
prioridad de PI a P2 a los eventos criticas y reenviar los
eventos criticas desde el centro de gestión y operación
remoto a los dispositivos electrónicos de los operarios
remotos.
30. Procedimiento, según la reivindicación 24, caracterizado porque comprende reasignar el nivel de prioridad de P2 a P3 a los eventos criticas y reenviar los eventos criticas desde el centro de gestión y operación remoto a los dispositivos electrónicos de los operarios remotos.
31. -Procedimiento, según la reivindicación 26, caracterizado porque comprende reasignar el nivel de prioridad de P2 a P3 a los eventos no criticas y reenviar los eventos no criticas desde el centro de gestión y operación remoto a los dispositivos electrónicos de los operarios remotos.
32. Procedimiento, según una cualquiera de las reivindicaciones 22 Y 24, caracterizado porque comprende reenviar los eventos criticas desde el centro de gestión y
operación remoto a los dispositivos electrónicos de los operarios remotos .
33. Procedimiento, según la reivindicación 28, caracterizado porque comprende porque comprende reenviar los eventos no críticos desde el centro de gestión y operación remoto a los dispositivos electrónicos de los operarios remotos.
Patentes similares o relacionadas:
 Dispositivo sensor, del 29 de Julio de 2020, de ELV Elektronik AG: Dispositivo sensor configurado como sensor para puerta o ventana de una instalación de vigilancia de edificios y/o como componente de un sistema domótico, […]
Dispositivo sensor, del 29 de Julio de 2020, de ELV Elektronik AG: Dispositivo sensor configurado como sensor para puerta o ventana de una instalación de vigilancia de edificios y/o como componente de un sistema domótico, […]
Alarma de seguridad personal, del 26 de Junio de 2020, de RUIZ CASTILLO, Pedro José: 1. Alarma de seguridad personal que comprende un elemento de comunicación móvil con un puerto configurado para aceptar un conector […]
SISTEMA PARA LA DISUASIÓN DEL ROBO DE BOLSOS O COMPLEMENTOS., del 28 de Mayo de 2020, de MARTÍN SAVINSKA, Constantino: 1. Sistema para la disuasión del robo de bolsos o complementos; caracterizado porque comprende: un dispositivo principal provisto de: una carcasa , unos […]
Método de vigilancia electrónica de artículos mediante el filtrado de patrones de manipulación de cliente de productos para su venta basándose en la detección de movimiento de etiquetas de red de sensores inalámbricos fijadas a dichos productos, del 6 de Mayo de 2020, de SENSORMATIC ELECTRONICS, LLC: Un método de gestión de artículos minoristas, comprendiendo el método: filtrar datos de sensor obtenidos por una etiqueta de nodo de sensor […]
DISPOSITIVO PORTÁTIL DE ALARMA, PROTECCIÓN Y DEFENSA CON DISPOSITIVO GSM, del 30 de Abril de 2020, de ROCHA CORTEZ, Douglas Rene: Este sistema de alarma compacto y portátil brinda al usuario la comunicación en dos vías es decir, puede enviar un aviso de alerta a teléfonos, diferenciando el tipo de evento, […]
SISTEMA DE VIGILANCIA, ALARMA Y DETECCIÓN MEDIANTE PULSERAS DE LOCALIZACIÓN Y ELECTROSHOCK PARA LA SEGURIDAD PERSONAL, del 23 de Abril de 2020, de SENDIN GOMEZ, Jose Secundino: La invención consiste en un sistema de vigilancia, alarma remota, localización y detección, para la defensa y seguridad personal, que comprende una primera […]
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
Sistema y procedimiento para controlar parámetros de red para una serie de paneles de control de seguridad doméstica/sistemas domésticos, del 26 de Febrero de 2020, de HONEYWELL INTERNATIONAL INC.: Un procedimiento implementado por procesador de ordenador para controlar parámetros de red para una serie de paneles de control conectados en red […]