DISPOSITIVO PARA DETERMINAR TENSORES DE INERCIA Y POSICIONES DE CENTROS DE GRAVEDAD EN TRES DIMENSIONES.
Dispositivo para medir centros de gravedad y tensores de inercia de una estructura en las tres dimensiones espaciales con un único amarre de la estructura al dispositivo,
fácilmente reajustable por parte del usuario.
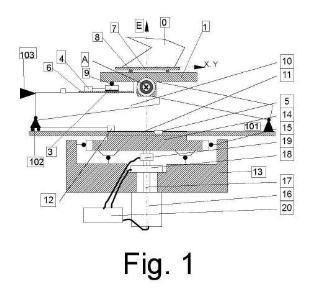
Compuesto básicamente por un mecanismo de elevación (10) con dos ejes de giro que permite posicionar la estructura (0) a medir en todas las orientaciones necesarias; un automatismo que induce un movimiento rotacional en un tercer eje de giro del dispositivo, formado por un motor (16), un sistema de adquisición-control (20) y unos sensores (18) y (19); y dos sensores (3) y (19) fácilmente intercambiables y cuya posición es ajustable.
De aplicación preferente para calcular el tensor de inercia y la posición del centro de gravedad de una estructura, en tres dimensiones.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131564.
Solicitante: FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS.
Nacionalidad solicitante: España.
Inventor/es: SIMON MARTINEZ,JOSE LUIS, MADRUGA ANGULO,OSCAR, SAEZ DE OCARIZ GRANJA,IDURRE, FERNANDEZ MURGUIONDO,ETOR, ESPINOSA RUIZ DE ALEGRÍA,Aitor, MARTINEZ GOIKOLEA,Aitor, IZAGA UGARRIZA,Joseba, HERRÁN FERNÁNDEZ,Mikel, LÓPEZ HERNÁNDEZ,Sergio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M1/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 1/00 Ensayo del equilibrado estático o dinámico de máquinas o estructuras. › Determinación del momento de inercia.
- G01M1/12 G01M 1/00 […] › Equilibrado estático; Determinación de la posición del centro de gravedad (por determinación del desequilibrio G01M 1/14).
Fragmento de la descripción:
Dispositivo para determinar tensores de inercia y posiciones de centros de gravedad en tres dimensiones El objeto del invento se refiere, en general, a un dispositivo para determinar el tensor de inercia y la posición del centro de gravedad de una estructura en tres dimensiones, con un único amarre de la estructura al dispositivo.
Más en particular, el objeto del invento se refiere a un banco de ensayos con dos ejes de giro dispuestos de tal manera que permiten orientar la estructura en todas las posiciones necesarias para calcular el tensor de inercia y la posición de su centro de gravedad en las tres dimensiones espaciales. La posición del centro de gravedad se obtiene a partir de las reacciones que permiten la estabilización de la estructura en dichas posiciones que son medidas mediante sensores. El tensor de inercia se obtiene a partir de movimientos precisos generados por un automatismo programable, formado por un motor y un controlador, en un tercer eje de giro.
En el actual estado de la técnica, los dispositivos existentes que permiten determinar tanto el tensor de inercia como el centro de gravedad necesitan posicionar la estructura respecto del dispositivo al menos dos veces y usar utillaje adicional lo que induce errores y riesgos para la estructura. Las metodologías empleadas para determinar los parámetros mencionados inducen errores que sólo pueden ser corregidos parcialmente usando procedimientos de cálculo y medida complejos que aumentan el coste de desarrollo y utilización del dispositivo.
Un método comúnmente empleado para determinar el tensor de inercia consiste en generar el movimiento mediante muelles de torsión, pero la falta de linealidad en su constante de rigidez para sus distintos niveles y direcciones de deformación provoca errores en la determinación de los tensores de inercia. Esto a su vez implica una reducción en el rango de tensores de inercia mesurables impuesta por la carga admisible en el muelle de torsión, lo que obligaría a cambiarlo, con el consecuente reajuste del dispositivo. Por otro lado, en este tipo de dispositivos se produce una reducción en el rango de tensores de inercia mesurables debida a la dependencia entre el periodo de oscilación y la velocidad máxima de rotación que obliga a ceñirse a un periodo máximo para evitar que una velocidad de rotación excesiva provoque la aparición de fuerzas centrifugas perjudiciales. Esta limitación en el periodo de oscilación impide obtener las precisiones deseadas puesto que la influencia del error cometido en la medición del periodo aumenta al reducir el periodo de oscilación. También se produce una reducción en el rango de tensores de inercia mesurables debida a la limitación del periodo de oscilación impuesto por la deformación admisible del muelle, lo que obligaría a cambiar el muelle.
Los usuarios, de los dispositivos actuales, que necesiten grandes precisiones para valores muy diferentes de carga se ven obligados a disponer de varios dispositivos con distintos rangos operativos o a realizar reajustes laboriosos y arriesgados para los que no están pensados los dispositivos.
Así pues, surge la necesidad de un dispositivo capaz de determinar con alta precisión el centro de gravedad y el tensor de inercia en tres dimensiones. El dispositivo objeto del invento soluciona esta problemática con un solo amarre de la estructura para evitar errores en la medición y riesgos para la propia estructura. Se caracteriza porque consta de:
- un mecanismo de elevación en el que se monta con posibilidad de giro un soporte basculante portador de la estructura a medir; yendo dicha estructura dispuesta en un disco de amarre que, a su vez, se encuentra unido a dicho soporte basculante con interposición de un elemento giratorio;
- un conjunto de apoyos que carga con la mayor parte del peso del soporte basculante y le proporciona una precisión de giro compatible con la precisión deseada en la determinación del centro de gravedad y del tensor de inercia;
- unos sensores de reacción cuyos datos permiten determinar el centro de Gravedad respecto a un eje horizontal rotativo;
- un bastidor, portador de un plato de amarre que gira respecto a él por la acción de un motor y que soporta al citado mecanismo de elevación con interposición de guías que permiten su desplazamiento respecto a un eje vertical de medición de tensores de Inercia para ajustar la posición de todos los elementos soportados por las propias guías, respecto de dicho eje vertical, para limitar las fuerzas centrífugas y aumentar la precisión en la determinación del tensor de Inercia;
- unos sensores de posición que, en cooperación con uno de los sensores de orientación, son los encargados de medir la posición de los elementos, soportados por las guías, respecto al eje vertical de medición de los tensores de Inercia ;
- sensores que miden la posición, velocidad, aceleración angular y el par proporcionado por el motor al plato de amarre; cuyos datos permiten determinar el tensor de inercia de la estructura respecto al eje vertical de medición de tensores de Inercia;
de modo que la determinación de Centros de Gravedad y tensores de Inercia se realiza con un único amarre de la estructura al dispositivo.
ES 2 403 732 Al
También se caracteriza porque el eje horizontal rotativo y el eje medidor de los tensores de Inercia están soportados por cojinetes de aire, sustentación magnética o elementos rodantes.
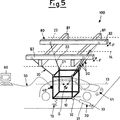
Adicionalmente, se dispone un segundo plato paralelo al plato de amarre y separado de él una cierta distancia, alrededor de los cuales se disponen sensores de fuerza que permiten medir las fuerzas radiales que aparecen al girar la estructura con una velocidad de rotación constante permitiendo realizar el balanceo dinámico de la estructura.
El dispositivo propuesto tiene un amplio rango operacional y facilidad para ser reajustado por parte del usuario con objeto de aumentar su rango y precisión si fuese necesario.
La aplicación prioritaria de la invención es determinar el tensor de inercia y la posición del centro de gravedad de una estructura, en tres dimensiones.
El proceso de medición y los cálculos necesarios para determinar los parámetros mencionados, son sencillos, permitiendo al usuario realizar un adecuado mantenimiento y adaptar el dispositivo a las distintas estructuras sometidas a medición sin depender del fabricante.
Las principales ventajas del dispositivo objeto de la presente invención son las siguientes:
• Permite determinar la posición del centro de gravedad y el tensor de inercia en tres dimensiones con un único amarre, evitando utillajes de posicionamiento adicionales y reduciendo los errores en la medición junto con los riesgos de manipulación de la estructura.
• El sensor que proporciona los datos necesarios para determinar la posición del centro de gravedad puede desplazarse e intercambiarse fácilmente. Esto permite optimizar la precisión de las medidas y maximizar el rango operacional del dispositivo adaptándolo a diferentes masas y posiciones del centro de gravedad de cada estructura a medir.
• El movimiento oscilante tiene un eje de giro vertical, respecto del que se orienta la estructura en todas las posiciones necesarias, evitando la influencia del peso de la estructura en la determinación del tensor de inercia, lo que permite simplificar los cálculos y obtener mejores precisiones.
• El movimiento oscilante se logra mediante un automatismo programable, formado por un motor y un controlador, que simula un muelle de torsión ideal, lo que permite:
- Ajustar el movimiento oscilatorio programando una constante de rigidez para el muelle ideal que se simula, garantizando la seguridad del espécimen evitando que aparezcan fuerzas centrífugas peligrosas, maximizando las precisiones en la determinación del tensor de inercia y el rango operacional del dispositivo. Todo ello sin necesidad de modificar la configuración del banco.
- Evitar la disipación de energía y la falta de linealidad en la deformación de muelles de torsión reales, pernicioso en la precisión de las medidas.
- Minimizar otros tipos de disipación de energía, como por ejemplo la producida por el efecto del aire circundante.
- Realizar una determinación rápida y directa del tensor de inercia mediante el sensor de par o realizar una medición de alta precisión del tensor de inercia mediante el periodo de oscilación.
Por ello, el contenido de la presente solicitud constituye un invento nuevo que implica actividad inventiva, y es susceptible de aplicación industrial.
Para comprender mejor el objeto de la presente invención, se representa en los planos...
Reivindicaciones:
1. Dispositivo para determinar tensores de inercia y posiciones de centros de gravedad en tres dimensiones; caracterizado porque consta de:
a) un mecanismo de elevación (10) en el que se monta con posibilidad de giro un soporte basculante (1) portador de la estructura (0) a medir; yendo dicha estructura (0) dispuesta en un disco de amarre (7) que, a su vez, se encuentra unido a dicho soporte basculante (1) con interposición de un elemento giratorio (8) , lo que permite fijar la estructura en todas la orientaciones necesarias para determinar el tensor de inercia y el centro de gravedad en tres dimensiones con un único amarre;
b) un conjunto de apoyos (2) , formados por cojinetes de aire que carga con la mayor parte del peso del soporte basculante (1) y le proporciona una precisión de giro compatible con la precisión deseada en la determinación del tensor de inercia y del Centro de Gravedad a medir;
c) unos sensores de reacción (3) deslizantes y fácilmente intercambiables, siendo el punto de aplicación y dirección de dichas reacciones, respecto al soporte basculante (1) , ajustables mediante los acoples (9) y conocidas mediante sensores adicionales o mediante geometría de las partes implicadas. Los datos de estas reacciones permiten determinar la posición del centro de Gravedad respecto a un eje horizontal rotativo (A) ;
d) Un plato de amarre (14) , soportado por cojinetes de aire, que gira con movimientos programables respecto al bastidor
(13) por la acción de un motor (16) y que soporta al citado mecanismo de elevación (10) con interposición de guías (11) permitiendo su desplazamiento respecto al eje de medición de los tensores de Inercia (E) para ajustar la distancia de todos los elementos soportados por las propias guías (11) con objeto de limitar las fuerzas centrífugas y aumentar la precisión en la medición de los tensores de inercia;
e) unos sensores de posición (12) que en cooperación con uno de los sensores de orientación (5) , son los encargados de medir la posición de los elementos soportados por las guías (11) respecto del eje de medición de los tensores de inercia (E)
f) sensores que proporcionan la posición, velocidad, aceleración angular y el par proporcionado por el motor (16) al plato de amarre (14) ; cuyos datos permiten determinar el tensor de inercia de la estructura (0) respecto al eje vertical de medición de tensores de Inercia (E) ;
de modo que las mediciones de Centros de Gravedad y tensores de Inercia se realizan con un único amarre de la estructura (0) al dispositivo.
2. Dispositivo para determinar tensores de inercia y posiciones de centros de gravedad en tres dimensiones; según la reivindicación 1; caracterizado porque el eje horizontal rotativo (A) y el eje medidor de los tensores de Inercia (E) están soportados por sustentación magnética o elementos rodantes.
3. Dispositivo para determinar tensores de inercia y posiciones de centros de gravedad en tres dimensiones; según una de las reivindicaciones anteriores; caracterizado porque, adicionalmente:
a) se dispone un segundo plato paralelo al plato de amarre (14) y separado de él una cierta distancia; y
b) se disponen sensores de fuerza alrededor de dichos platos de amarre;
de modo que se permite medir las fuerzas radiales que aparecen al girar la estructura (0) con una velocidad de rotación constante y pudiendo realizar el balanceo dinámico de la estructura (0) .
Patentes similares o relacionadas:
 DISPOSITIVO PARA MEDIR EL TENSOR DE INERCIA DE UN CUERPO RIGIDO, del 25 de Enero de 2010, de POLITECNICO DI MILANO: Dispositivo para medir el tensor de inercia de un cuerpo rígido que consiste en por lo menos un cuerpo rígido , del cual va a medirse el tensor de inercia, por lo menos […]
DISPOSITIVO PARA MEDIR EL TENSOR DE INERCIA DE UN CUERPO RIGIDO, del 25 de Enero de 2010, de POLITECNICO DI MILANO: Dispositivo para medir el tensor de inercia de un cuerpo rígido que consiste en por lo menos un cuerpo rígido , del cual va a medirse el tensor de inercia, por lo menos […]
PROCEDIMIENTO PARA DETERMINAR EL MOMENTO DE INERCIA DE UN SISTEMA DE ACCIONAMIENTO POR MOTOR ELECTRICO., del 1 de Marzo de 2007, de DR. JOHANNES HEIDENHAIN GMBH: Procedimiento para determinar el momento de inercia de masa de un sistema de accionamiento por motor eléctrico de una máquina herramienta, que comprende un motor […]
EQUIPO PARA LA PRUEBA DE MONEDAS U OBJETOS PLANOS, del 16 de Diciembre de 1996, de LANDIS & GYR TECHNOLOGY INNOVATION AG: UN EQUIPO PARA LA PRUEBA DE LA AUTENTICIDAD DE MONEDAS, U OTROS OBJETOS PLANOS, MUESTRA DOS BARRERAS (L1, L2) OPTICAS DE LUZ SOBRE LA CUALES SE DISPONE […]
DISPOSITIVO PARA ANULAR LAS FUERZAS AERODINAMICAS SOBRE UN CUERPO EN ROTACION Y APLICACION EN EQUILIBRADO DINAMICO, del 1 de Agosto de 1992, de AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE: DISPOSITIVO DE EQUILIBRADO DINAMICO. CONSTA DE UNA CAMPANA RODEANDO UN CUERPO GIRATORIO PROVISTO DE ESCABROSIDADES Y GIRANDO ALREDEDOR […]
APARATO DE MEDIDA DE LAS CARACTERISTICAS MASICAS DE UN CUERPO Y SU APLICACION EN LA MEDIDA DE LAS CARACTERISTICAS DE UN SATELITE EN SECO, del 1 de Julio de 1991, de AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE: APARATO DE MEDIDA PARA DETERMINAR LAS CARACTERISTICA MASICAS DE UN CUERPO DEL GENERO QUE COMPORTA, TRANSPORTADO POR UNA BASE , UNA BANDEJA DE RECEPCION PARA […]
Sistema electrónico para estimación de carga y centrado de aeronaves, del 17 de Agosto de 2018, de UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA: En la actualidad, existen aeronaves en las que se tienen que calcular la carga y el centro de gravedad de la aeronave de forma manual y estimativa, por lo que estos […]
Sistema de pesaje y procedimiento para pesar una carga de un camión articulado basculante, del 31 de Enero de 2018, de Schmitz Cargobull Gotha GmbH: Sistema de pesaje para una carga de un camión articulado basculante, que comprende: - una primera unidad sensora (SE1) que está diseñada para detectar, a través de un […]
Medición de las propiedades inerciales de una superficie de control movible, del 22 de Abril de 2015, de AIRBUS OPERATIONS, S.L: Método para la obtención de las propiedades inerciales de una superficie de control movible de una superficie de control de una aeronave, dicha superficie de control […]