DISPOSITIVO PARA MEDIR EL TENSOR DE INERCIA DE UN CUERPO RIGIDO.
Dispositivo para medir el tensor de inercia de un cuerpo rígido que consiste en por lo menos un cuerpo rígido (11),
del cual va a medirse el tensor de inercia, por lo menos dos medios de suspensión (20) con respecto a por lo menos dos puntos fijos, imponiendo dichos medios de suspensión (20) por lo menos dos grados de restricción, unos medios de excitación (30) para producir el movimiento de dicho cuerpo rígido (11), así como un grupo de detección de movimiento (40) y un grupo de transmisión (50) para transmitir datos del movimiento detectado a un procesador numérico (60) para registrar dichos datos del movimiento detectado y ejecutar un procedimiento de identificación de parámetros para obtener las seis componentes del tensor de inercia de dicho cuerpo rígido, caracterizado porque el procedimiento de identificación se basa en una simulación de movimiento con un modelo matemático no lineal del cuerpo rígido suspendido como un péndulo y una minimización de una función Cf de coste dependiendo de la diferencia entre dichos datos de movimiento registrados y los resultados de dicha simulación de movimiento, y porque dichos medios de suspensión (20) que comprenden por lo menos dos cables o árboles (22) suspenden dicho cuerpo rígido (11) como un péndulo, convergiendo los ejes de dichos cables o árboles (22) en reposo sustancialmente en el centro de gravedad (G) de dicho cuerpo rígido (11)
Tipo: Resumen de patente/invención. Número de Solicitud: W0305781EP.
Solicitante: POLITECNICO DI MILANO.
Nacionalidad solicitante: Italia.
Dirección: PIAZZA LEONARDO DA VINCI, 32,20133 MILANO.
Inventor/es: MASTINU,GIANPIERO, GOBBI,MASSIMILIANO, DONISELLI,CARLO.
Fecha de Publicación: .
Fecha Concesión Europea: 12 de Agosto de 2009.
Clasificación Internacional de Patentes:
- G01M1/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 1/00 Ensayo del equilibrado estático o dinámico de máquinas o estructuras. › Determinación del momento de inercia.
Clasificación PCT:
- G01M1/10 G01M 1/00 […] › Determinación del momento de inercia.
Clasificación antigua:
- G01M1/10 G01M 1/00 […] › Determinación del momento de inercia.
Fragmento de la descripción:
Dispositivo para medir el tensor de inercia de un cuerpo rígido.
La presente invención se refiere a un dispositivo para medir el tensor de inercia de un cuerpo rígido.
El comportamiento dinámico de sistemas de múltiples cuerpos puede simularse con exactitud si se llevan a cabo de manera preliminar mediciones exactas de los parámetros de inercia de los cuerpos individuales que constituyen el sistema.
Es necesario obtener valores precisos para las componentes del tensor de inercia de un cuerpo rígido puesto que, en la simulación de movimiento, incluso pequeñas variaciones en los valores de las componentes pueden influir considerablemente en los resultados.
Se han propuesto algunos dispositivos para medir parámetros de inercia (masa, centro de gravedad y tensor de inercia) que generalmente requieren en primer lugar la determinación de la posición del centro de gravedad. En dichos dispositivos conocidos, el cuerpo rígido que va a medirse se hace girar alrededor de un eje predeterminado y el valor del momento de inercia alrededor de tal eje se calcula midiendo la frecuencia de oscilación. Por tanto, el tensor de inercia completo puede medirse repitiendo el procedimiento de medición para seis ejes de giro orientados de manera diferente. Este procedimiento es laborioso, porque la necesidad de modificar la orientación de los ejes con respecto al cuerpo rígido requiere o bien un equipo muy especial, o bien alternativamente la dificultad sustancial en reposicionar (en por lo menos seis posiciones diferentes) el cuerpo rígido en el dispositivo. Por tanto, los dispositivos de medición desarrollados son bastante complicados (o a menudo imposibles) de utilizar, especialmente cuando el cuerpo en consideración es relativamente grande y pesado como un automóvil o un avión.
Hahn, H. et al, "Inertia Parameter Identification of Rigid Bodies Using a Multi-Axis Test Facility" IEEE, 1994, páginas 1735-1737, da a conocer una instalación de prueba de múltiples ejes para la identificación de parámetros de inercia de cuerpos rígidos.
El objetivo de la presente invención es realizar un dispositivo para medir el tensor de inercia de un cuerpo rígido que permita que el cuerpo rígido gire alrededor de un eje genérico que es de manera continua variable en el espacio.
Otro objetivo es realizar un dispositivo preciso y fiable.
Otro objetivo de la presente invención es realizar un dispositivo de medición que sea particularmente sencillo y funcional, con costes limitados.
Estos objetivos según la presente invención se alcanzan realizando un dispositivo de medición tal como se explica resumidamente en la reivindicación 1.
Están previstas, características adicionales en las reivindicaciones subordinadas.
Las características y ventajas de un dispositivo para medir el tensor de inercia de un cuerpo rígido según la presente invención se pondrán de manifiesto a partir de la siguiente descripción, proporcionada a título de ejemplo y no a título limitativo, haciendo referencia a los dibujos esquemáticos adjuntos, en los que:
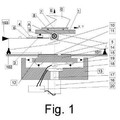
la figura 1 muestra esquemáticamente una primera forma de realización de un dispositivo con cinco grados de libertad para medir el tensor de inercia de un cuerpo rígido según la presente invención;
la figura 2 muestra una variante del dispositivo de la figura 1 con cuatro grados de libertad;
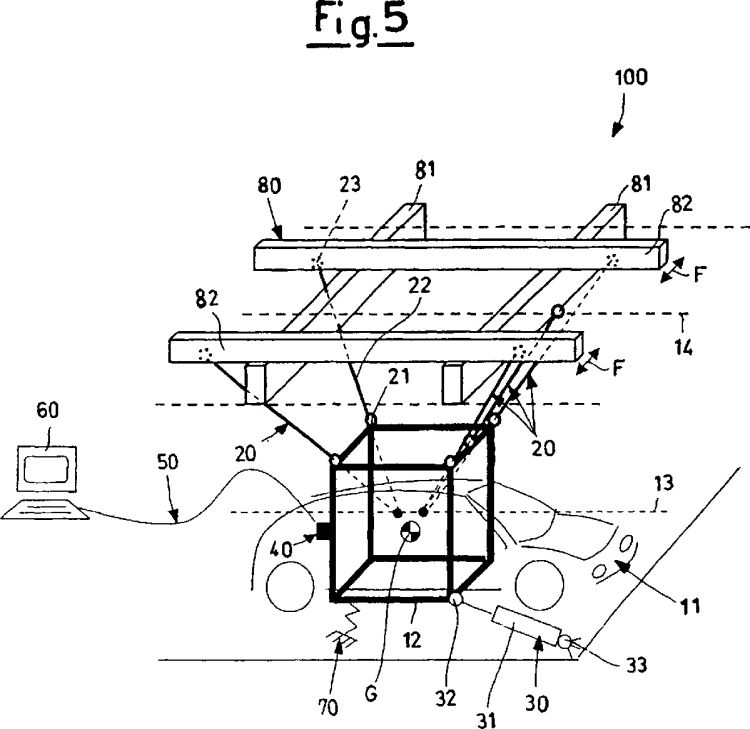
las figuras 3 a 5 muestran esquemáticamente unas formas de realización adicionales de un dispositivo, respectivamente con tres, dos y un grado de libertad, para medir el tensor de inercia de un cuerpo rígido, según la presente invención, en el que el cuerpo rígido es por ejemplo un automóvil.
Haciendo referencia a las figuras, se muestra un dispositivo para medir el tensor de inercia de un cuerpo rígido, indicado en su conjunto con 10 que, en la forma de realización más sencilla, comprende un cuerpo rígido 11, cuyo tensor de inercia desea medirse, uno o más medios de suspensión 20 con respecto a uno o más puntos fijos, medios de excitación 30 para inducir el movimiento del cuerpo rígido 11, así como un grupo 40 para detectar movimiento y un grupo 50 para transmitir datos a un procesador numérico 60, que consiste por ejemplo en un cable.
Según una forma de realización preferida, el cuerpo 11 se fija rígidamente en un bastidor 12, por ejemplo realizado en forma de una placa, sujeto mediante los medios de suspensión. Según la forma y la naturaleza del cuerpo rígido 11, pueden utilizarse elementos de fijación del cuerpo rígido 11 al bastidor 12, no mostrados, de tipo rígido o con una banda.
En el dispositivo de medición 10 de la figura 1, el bastidor 12 se conecta a través de una primera junta esférica 21 a un cable o árbol 22, conectado a su vez al punto fijo a través de una segunda junta esférica 23.
También pueden utilizarse, por ejemplo, unas pinzas rígidas en combinación con el cable 22 como medios de suspensión 20, aptas para imponer sólo un grado de libertad, en lugar de las juntas esféricas 21 y 23, puesto que los cinco grados de libertad del cuerpo rígido 11 se garantizan por la flexibilidad del cable 22.
El movimiento del grupo que consiste en el cuerpo rígido 11 y el bastidor 12 se produce por los medios de excitación 30, esquematizados en las figuras y que están constituidos, por ejemplo, por un accionador 31 lineal conectado respectivamente al bastidor 12 y al punto fijo a través de una primera junta esférica 32 y una segunda junta esférica 33.
Los medios de excitación 30 pueden comprender unos dispositivos sencillos aptos para establecer las condiciones de partida deseadas, tales como una cuerda conectada al bastidor, o al cuerpo rígido a través de, por ejemplo, un dispositivo electromagnético, que se desconecta del grupo que consiste en el cuerpo rígido 11 y el bastidor 12 para iniciar el movimiento.
Alternativamente, los medios de excitación 30 también podrían consistir en un accionador lineal o en un motor eléctrico (más caja de cambios) conectado rígidamente (directa o indirectamente) al cuerpo rígido (y no conectado a un punto fijo en el suelo) y equipado respectivamente con una masa de traslación o de lo contrario con una masa excéntrica. La excitación puede proporcionarse seleccionando apropiadamente la amplitud de fuerza y la frecuencia con el fin de obtener un movimiento complejo (harmónico, precaótico o caótico) del grupo constituido por el bastidor 12 y el cuerpo rígido 11, con el objetivo de conseguir una buena exactitud y sensibilidad del dispositivo de medición 10.
El grupo constituido por el bastidor 12 y el cuerpo rígido 11, mostrado en la figura 1, presenta cinco grados de libertad y su movimiento se registra por el grupo de detección de movimiento 40, que consiste por ejemplo en sensores de movimiento. El movimiento del cuerpo rígido 11 también puede desviarse, en una forma de realización preferida, mediante uno o más elementos elásticos 70 de tipo lineal o no lineal, con el fin de producir oscilaciones espaciales complejas caóticas o precaóticas para mejorar la exactitud y la sensibilidad del dispositivo de medición 10.
Los elementos elásticos 70, que pueden estar separados por un espacio con respecto al cuerpo 12 rígido, comprenden por ejemplo en un muelle o una pluralidad de muelles en serie y/o en paralelo. Los elementos elásticos 70 pueden estar provistos (en configuraciones en serie y/o en paralelo) de uno o más elementos de amortiguación, no mostrados, tales como amortiguadores hidráulicos o de lo contrario amortiguadores de fricción.
Los sensores de movimiento, por otra parte, están constituidos por ejemplo en tres giroscopios, orientados a lo largo de tres ejes perpendiculares y tres servoacelerómetros, cuyos ejes de sensibilidad están orientados a lo largo de tres ejes perpendiculares. En una forma de realización adicional, los sensores de movimiento pueden consistir en cinco acelerómetros más un giroscopio o acelerómetro adicional.
Los sensores de movimiento pueden fijarse rígidamente al cuerpo rígido 11, al bastidor 12 o dividirse entre los dos.
Las señales generadas por el grupo de detección 40 se transmiten a través del cable 50, que es muy flexible, al sistema de adquisición del procesador numérico 60. En el procesador 60, se ejecuta el software dedicado a la identificación de las componentes del tensor de inercia del cuerpo 11 en examen, según las formas descritas a continuación en la presente memoria. Los grupos de...
Reivindicaciones:
1. Dispositivo para medir el tensor de inercia de un cuerpo rígido que consiste en por lo menos un cuerpo rígido (11), del cual va a medirse el tensor de inercia, por lo menos dos medios de suspensión (20) con respecto a por lo menos dos puntos fijos, imponiendo dichos medios de suspensión (20) por lo menos dos grados de restricción, unos medios de excitación (30) para producir el movimiento de dicho cuerpo rígido (11), así como un grupo de detección de movimiento (40) y un grupo de transmisión (50) para transmitir datos del movimiento detectado a un procesador numérico (60) para registrar dichos datos del movimiento detectado y ejecutar un procedimiento de identificación de parámetros para obtener las seis componentes del tensor de inercia de dicho cuerpo rígido, caracterizado porque el procedimiento de identificación se basa en una simulación de movimiento con un modelo matemático no lineal del cuerpo rígido suspendido como un péndulo y una minimización de una función Cf de coste dependiendo de la diferencia entre dichos datos de movimiento registrados y los resultados de dicha simulación de movimiento, y porque dichos medios de suspensión (20) que comprenden por lo menos dos cables o árboles (22) suspenden dicho cuerpo rígido (11) como un péndulo, convergiendo los ejes de dichos cables o árboles (22) en reposo sustancialmente en el centro de gravedad (G) de dicho cuerpo rígido (11).
2. Dispositivo según la reivindicación 1, caracterizado porque dicho cuerpo rígido (11) está colocado sobre un bastidor (12) soportado por dichos medios de suspensión (20).
3. Dispositivo según la reivindicación 2, caracterizado porque dicho bastidor (12) es una placa.
4. Dispositivo según la reivindicación 1 ó 2, caracterizado porque cada uno de dichos por lo menos dos medios de suspensión (20) consiste en un cable (22) flexible equipado en los extremos con unas juntas esféricas (21 y 23).
5. Dispositivo según la reivindicación 1 ó 2, caracterizado porque cada uno de dichos por lo menos dos medios de suspensión (20) consiste en un cable (22) flexible equipado en los extremos con pinzas rígidas.
6. Dispositivo según la reivindicación 1 ó 2, caracterizado porque cada uno de dichos por lo menos dos medios de suspensión consiste en un árbol (22) equipado en los extremos con unas juntas esféricas (21 y 23).
7. Dispositivo según la reivindicación 1 ó 2, caracterizado porque cada uno de dichos por lo menos dos medios de suspensión (20) comprende por lo menos un elemento elástico.
8. Dispositivo según la reivindicación 1 ó 2, caracterizado porque cada uno de dichos por lo menos dos medios de suspensión (20) comprende por lo menos un elemento viscoelástico.
9. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dichos medios de excitación (30) consisten en un accionador (31) lineal conectado a dicho cuerpo rígido (11) o bastidor (12) y a un punto fijo a través de unos elementos de fijación (32, 33).
10. Dispositivo según la reivindicación 9, caracterizado porque dichos elementos de fijación son unas juntas esféricas (32, 33).
11. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dichos medios de excitación (30) consisten en una cuerda conectada a dicho cuerpo rígido (11) o bastidor (12) a través de un dispositivo electromagnético apto para desconectar dicha cuerda del cuerpo (11) o bastidor (12) para iniciar el movimiento.
12. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dichos medios de excitación (30) consisten en por lo menos un accionador lineal conectado rígidamente a dicho cuerpo rígido (11) o bastidor (12), desconectado del suelo y equipado con una masa de traslación.
13. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dichos medios de excitación (30) consisten en por lo menos un motor eléctrico conectado rígidamente a dicho cuerpo rígido (11) o bastidor (12), desconectado del suelo y equipado con una masa giratoria.
14. Dispositivo según la reivindicación 1 ó 2, caracterizado porque comprende unos elementos elásticos (70) aptos para fijar dicho cuerpo rígido (11) o bastidor (12) a un punto fijo.
15. Dispositivo según la reivindicación 14, caracterizado porque dichos elementos elásticos (70) son del tipo lineal.
16. Dispositivo según la reivindicación 14, caracterizado porque dichos elementos elásticos (70) son del tipo no lineal.
17. Dispositivo según la reivindicación 14, caracterizado porque dichos elementos elásticos (70) consisten en por lo menos un muelle.
18. Dispositivo según la reivindicación 14, caracterizado porque dichos elementos elásticos (70) están separados por un espacio con respecto al cuerpo rígido (11) o bastidor (12).
19. Dispositivo según la reivindicación 14, caracterizado porque dichos elementos elásticos (70) están provistos de unos elementos de amortiguación.
20. Dispositivo según la reivindicación 1, caracterizado porque dicho grupo de detección de movimiento (40) comprende unos sensores de movimiento aplicados a dicho cuerpo rígido (11).
21. Dispositivo según la reivindicación 2, caracterizado porque dicho grupo de detección de movimiento (40) comprende unos sensores de movimiento aplicados a dicho bastidor (12).
22. Dispositivo según la reivindicación 20 ó 21, caracterizado porque dichos sensores de movimiento consisten en tres giroscopios y tres acelerómetros.
23. Dispositivo según la reivindicación 20 ó 21, caracterizado porque dichos sensores de movimiento consisten en cinco acelerómetros y un giroscopio o un acelerómetro adicional.
24. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dicho grupo de detección de movimiento (40) comprende unos sensores ópticos.
25. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dicho grupo de detección de movimiento (40) comprende unas células de carga en un número igual a dichos medios de suspensión (20), aptas para medir las fuerzas axiales respectivas.
26. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dicho grupo de transmisión de datos (50) comprende unos cables flexibles.
27. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dicho grupo de transmisión de datos (50) comprende un sistema de telemetría interconectado con dicho procesador numérico (60).
28. Dispositivo según la reivindicación 1 ó 2, caracterizado porque dicho procedimiento de identificación paramétrica se basa en un procedimiento cuasi de Montecarlo y en un procedimiento de gradiente.
29. Dispositivo según la reivindicación 1, caracterizado porque los elementos de unión al suelo (80) de dichos medios de suspensión (20) pueden desplazarse y consisten en una estructura (80) superior que comprende cuatro vigas (81, 82), soportando dos vigas (81), paralelas entre sí y perpendiculares a un eje longitudinal (14), dos vigas (82), que son paralelas entre sí y pueden trasladarse en una dirección perpendicular a dicho eje longitudinal (14).
Patentes similares o relacionadas:
 DISPOSITIVO PARA DETERMINAR TENSORES DE INERCIA Y POSICIONES DE CENTROS DE GRAVEDAD EN TRES DIMENSIONES, del 21 de Mayo de 2013, de FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS: Dispositivo para medir centros de gravedad y tensores de inercia de una estructura en las tres dimensiones espaciales con un único amarre de […]
DISPOSITIVO PARA DETERMINAR TENSORES DE INERCIA Y POSICIONES DE CENTROS DE GRAVEDAD EN TRES DIMENSIONES, del 21 de Mayo de 2013, de FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS: Dispositivo para medir centros de gravedad y tensores de inercia de una estructura en las tres dimensiones espaciales con un único amarre de […]
PROCEDIMIENTO PARA DETERMINAR EL MOMENTO DE INERCIA DE UN SISTEMA DE ACCIONAMIENTO POR MOTOR ELECTRICO., del 1 de Marzo de 2007, de DR. JOHANNES HEIDENHAIN GMBH: Procedimiento para determinar el momento de inercia de masa de un sistema de accionamiento por motor eléctrico de una máquina herramienta, que comprende un motor […]
EQUIPO PARA LA PRUEBA DE MONEDAS U OBJETOS PLANOS, del 16 de Diciembre de 1996, de LANDIS & GYR TECHNOLOGY INNOVATION AG: UN EQUIPO PARA LA PRUEBA DE LA AUTENTICIDAD DE MONEDAS, U OTROS OBJETOS PLANOS, MUESTRA DOS BARRERAS (L1, L2) OPTICAS DE LUZ SOBRE LA CUALES SE DISPONE […]
DISPOSITIVO PARA ANULAR LAS FUERZAS AERODINAMICAS SOBRE UN CUERPO EN ROTACION Y APLICACION EN EQUILIBRADO DINAMICO, del 1 de Agosto de 1992, de AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE: DISPOSITIVO DE EQUILIBRADO DINAMICO. CONSTA DE UNA CAMPANA RODEANDO UN CUERPO GIRATORIO PROVISTO DE ESCABROSIDADES Y GIRANDO ALREDEDOR […]
APARATO DE MEDIDA DE LAS CARACTERISTICAS MASICAS DE UN CUERPO Y SU APLICACION EN LA MEDIDA DE LAS CARACTERISTICAS DE UN SATELITE EN SECO, del 1 de Julio de 1991, de AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE: APARATO DE MEDIDA PARA DETERMINAR LAS CARACTERISTICA MASICAS DE UN CUERPO DEL GENERO QUE COMPORTA, TRANSPORTADO POR UNA BASE , UNA BANDEJA DE RECEPCION PARA […]