Controlador para máquinas eléctricas.
Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles,
y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia (LwA, LwB, LwC,) depende de la posición mutua delas partes, comprendiendo el circuito de control:
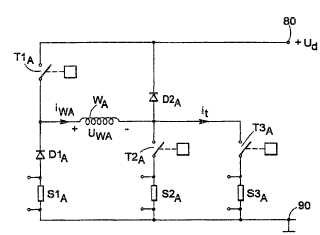
un primer terminal (80) y un segundo terminal (90) para la conexión a una fuente de energía (70); estandoacoplado el devanado de fase (WA) entre el primer terminal (80) y el segundo terminal (90) a través de uncircuito en puente (85A, 85B, 85C); teniendo el citado circuito en puente (85A):
válvulas de accionamiento (T1A, T2A) para disponer el devanado en un modo de accionamiento parahacer que una corriente de accionamiento circule a través del devanado de fase (WA), teniendola corriente de accionamiento un cierto valor máximo, y
un sensor de corriente (S3A) para medir una corriente de prueba cuando el devanado está en unmodo de no accionamiento, en el que
el circuito de control incluye:
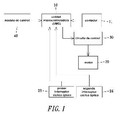
un medio para establecer la citada posición mutua que depende de un valor de corriente y / o deun valor de tiempo medidos; estando adaptado el citado medio de establecimiento de la posiciónpara establecer la citada posición mutua dependiendo de la citada corriente de prueba;
que se caracteriza porque
el sensor de corriente es un sensor de corriente de prueba (S3A) que está adaptado para la medición de lascorrientes de prueba que tienen un segundo valor máximo menor que el citado valor máximo determinado;
porque
el circuito en puente (85A) incluye una válvula de prueba (T3A, T3B, T3C), diferente de las citadas válvulasde accionamiento (T1A, T2A), adaptada para hacer que la corriente de prueba circule a través del devanadoy a través del citado sensor de corriente de prueba (S3A, S3B, S3C) durante un modo de no accionamiento;
estando conectada en serie la citada válvula de prueba (T3A, T3B, T3C) con el citado sensor de corriente deprueba (S3A, S3B, S3C);
y porque
el circuito de control está adaptado para controlar las válvulas (T1A, T2A, T3A) de manera que impida que lacitada corriente de accionamiento circule a través del sensor de corriente de prueba (S3A).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2000/001465.
Solicitante: CG Drives & Automation Sweden AB.
Nacionalidad solicitante: Suecia.
Dirección: Box 22225 250 24 HELSINGBORG SUECIA.
Inventor/es: BENGTSSON,JOHAN, STENDAHL,HENRIK, GÖRANSSON,GÖRAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P25/08 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 25/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de motor de corriente alterna o por detalles estructurales. › Motores de reluctancia.
- H02P6/18 H02P […] › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
PDF original: ES-2394479_T3.pdf
Fragmento de la descripción:
Controlador para máquinas eléctricas Campo de la invención La presente invención se refiere a un circuito de control para una máquina de reluctancia y a un procedimiento de funcionamiento de un circuito de control de este tipo.
Técnica relevante Las máquinas de reluctancia tienen dos partes, que son amovibles una en relación con la otra, comúnmente denominadas "estator" y "rotor", respectivamente. Los tipos más comunes de máquinas de reluctancia tienen un rotor que está suspendido de manera que puede rotar dentro de un estator. La máquina está provista de bobinas, a las que se puede ser proporcionar una corriente eléctrica con el fin de producir un flujo magnético. El rotor en combinación con el estator forma un circuito magnético a través del cual circula el campo magnético producido por las bobinas.
Cuando la posición mutua entre el rotor y el estator cambia, entonces la reluctancia en el circuito magnético cambia.
Con el fin de accionar un motor de reluctancia con un número de devanados, la corriente se conecta a los devanados de una manera que depende de la posición mutua del rotor y del estator.
Una forma conocida para proporcionar este control de la corriente incluye la detección de la posición del rotor con la ayuda de sensores de posición separados que están acoplados al rotor, con lo que los sensores de posición producen una señal de salida que depende de la posición del rotor.
Otra forma conocida para lograr el control de las corrientes de fase utiliza el hecho de que la inductancia de una fase varía dependiendo de la posición del rotor con relación al estator.
La patente norteamericana número 5.043.643 describe un procedimiento para determinar la posición del rotor de una máquina de reluctancia por medio de la ecuación en la que i es la corriente a través de los devanados de fase, en la que U es el voltaje a través de una conexión en serie del devanado de fase, una válvula de transistor y una resistencia de sensor de corriente, y en la que R es una constante predeterminada que corresponde a la suma de las resistencias en un devanado de fase, un transistor activado y una resistencia de medición de corriente.
El documento norteamericano US 5.525.887 desvela un diagrama esquemático simplificado de un circuito electrónico para la determinación de la posición del rotor con respecto al estator de un motor de Reluctancia Conmutada. La posición determinada se utiliza con el fin de poder energizar o conmutar un devanado de fase del motor de Reluctancia Conmutada en el momento adecuado. Más en particular, el circuito incluye una pluralidad de conmutadores de fase conectados entre los citados devanados de fase y un voltaje de suministro para conectar eléctricamente de manera selectiva el voltaje de suministro a cada devanado de fase. El circuito para controlar el motor incluye medios de detección de corriente conectados al devanado de fase. El sensor de corriente produce como salida un voltaje que es proporcional a la corriente. La corriente que circula a través del devanado de fase genera una señal correspondiente en el sensor.
El documento WO 99/09646 desvela una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menos un devanado de fase que tiene una inductancia que depende de la posición mutua de las partes. Un dispositivo para la regulación de una máquina de reluctancia comprende un puente de válvula que tiene una válvula controlable, que está conectada en serie con el devanado de fase y que es ajustable entre un estado esencialmente abierto y un estado conductor, y medios para medir una corriente a través del devanado de fase.
Sumario de la invención La inductancia momentánea de un devanado se puede determinar proporcionando un impulso de voltaje que tiene una cierta amplitud a un devanado y midiendo la respuesta de corriente - tiempo. De esta manera, un valor de la inductancia puede ser calculado, por ejemplo, midiendo la amplitud de la corriente en un cierto momento después de la conmutación del impulso. Alternativamente, un valor de la inductancia se puede calcular midiendo la cantidad de tiempo que transcurre hasta que se alcance una cierta amplitud de corriente. En ambos casos, sin embargo, la medición implica el suministro de impulsos de voltaje al devanado. La provisión de tales impulsos de voltaje con una cierta frecuencia de repetición puede hacer que se genere ruido por vibraciones en los componentes.
La presente invención se refiere al problema de la mejora del rendimiento de un circuito de control para una máquina de reluctancia.
Este problema se soluciona por medio de un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menos un devanado inductivo de fase, cuya inductancia depende de la posición mutua de las partes; el circuito de control comprende:
un primer terminal y un segundo terminal para la conexión a una fuente de energía, estando acoplado el devanado de fase entre el primer terminal y el segundo terminal a través de un circuito en puente; comprendiendo el citado circuito en puente:
válvulas de accionamiento para disponer el devanado en un modo de accionamiento para hacer que una corriente de accionamiento circule a través del devanado de fase, teniendo la corriente de accionamiento un cierto valor máximo; y
un sensor de corriente para la medición de una corriente de prueba cuando el devanado está en un modo de no accionamiento; en el que el circuito de control incluye:
un medio para establecer la citada posición mutua dependiendo de un valor de corriente y / o de un valor de tiempo medidos; estando adaptado el citado medio de establecimiento de posición para establecer la citada posición mutua dependiendo de la citada corriente de prueba.
Además, el sensor de corriente es un sensor de corriente de prueba que está adaptado para la medición de corrientes de prueba que tienen un segundo valor máximo que es menor que el citado cierto valor máximo; y el circuito en puente incluye una válvula de prueba, diferente de las citadas válvulas de accionamiento, que está adaptada para hacer que la corriente de prueba circule a través del devanado y a través del citado sensor de corriente de prueba durante un modo de no accionamiento; estando conectada en serie la citada válvula de prueba con el citado sensor de corriente de prueba. Además, el circuito de control está adaptado para controlar las válvulas con el fin de evitar que la citada corriente de accionamiento circule a través del sensor de corriente de prueba.
El problema también se soluciona por un procedimiento de acuerdo con la reivindicación 11 de procedimiento independiente adjunta. Otras realizaciones de la invención están definidas en las reivindicaciones dependientes.
Esta solución permite ventajosamente mediciones de posición utilizando bajas amplitudes de corriente. Las amplitudes de corriente más bajas conducen ventajosamente a la reducción de ruido de la máquina de reluctancia, puesto que el nivel de ruido está relacionado estrechamente con las amplitudes de corriente.
Además la solución anterior permite realizar mediciones de corriente más frecuentes, mejorando así la versatilidad del circuito de control. Puesto que la posición y el valor de la inductancia, usando el circuito de control que se ha descrito más arriba, se puede establecer con un valor superior de corriente más pequeño, la frecuencia de repetición también se puede incrementar. Esto es debido al hecho de que un valor superior de corriente más pequeño a través del devanado al final de un impulso de voltaje corresponde a una menor cantidad de energía almacenada en el devanado. Por lo tanto, la energía almacenada en el devanado se puede drenar más rápidamente y se puede iniciar mucho antes un nuevo ciclo de medición. Por lo tanto, el procedimiento de medición de la inductancia se puede utilizar con una mayor velocidad de la máquina. De acuerdo con realizaciones preferidas, la medición de la corriente puede tener una frecuencia de repetición de más de un kilohercio. Preferiblemente, la frecuencia de repetición de la medición corriente es superior a 1, 5 kHz.
Con una medición de corriente más frecuente, la inexactitud de las determinaciones de inductancia resultantes también se reduce, lo que conduce a una determinación de la posición más precisa para una máquina de reluctancia en movimiento. Este efecto positivo se obtiene puesto que el acortamiento de la duración del procedimiento de medición de la corriente, cuando la máquina de reluctancia está en movimiento, conduce a un menor movimiento del rotor durante el procedimiento de medición. Puesto que la inductancia depende de la posición, el movimiento... [Seguir leyendo]
Reivindicaciones:
1. Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menos un devanado inductivo de fase (WA, WB, WC) , cuya inductancia (LwA, LwB, LwC, ) depende de la posición mutua de las partes, comprendiendo el circuito de control:
un primer terminal (80) y un segundo terminal (90) para la conexión a una fuente de energía (70) ; estando acoplado el devanado de fase (WA) entre el primer terminal (80) y el segundo terminal (90) a través de un circuito en puente (85A, 85B, 85C) ; teniendo el citado circuito en puente (85A) :
válvulas de accionamiento (T1A, T2A) para disponer el devanado en un modo de accionamiento para hacer que una corriente de accionamiento circule a través del devanado de fase (WA) , teniendo la corriente de accionamiento un cierto valor máximo, y
un sensor de corriente (S3A) para medir una corriente de prueba cuando el devanado está en un modo de no accionamiento, en el que el circuito de control incluye:
un medio para establecer la citada posición mutua que depende de un valor de corriente y / o de 15 un valor de tiempo medidos; estando adaptado el citado medio de establecimiento de la posición para establecer la citada posición mutua dependiendo de la citada corriente de prueba;
que se caracteriza porque el sensor de corriente es un sensor de corriente de prueba (S3A) que está adaptado para la medición de las corrientes de prueba que tienen un segundo valor máximo menor que el citado valor máximo determinado;
porque el circuito en puente (85A) incluye una válvula de prueba (T3A, T3B, T3C) , diferente de las citadas válvulas de accionamiento (T1A, T2A) , adaptada para hacer que la corriente de prueba circule a través del devanado y a través del citado sensor de corriente de prueba (S3A, S3B, S3C) durante un modo de no accionamiento; estando conectada en serie la citada válvula de prueba (T3A, T3B, T3C) con el citado sensor de corriente de prueba (S3A, S3B, S3C) ;
y porque el circuito de control está adaptado para controlar las válvulas (T1A, T2A, T3A) de manera que impida que la citada corriente de accionamiento circule a través del sensor de corriente de prueba (S3A) .
2. El circuito de control de acuerdo con la reivindicación 1, en el que las citadas válvulas de accionamiento inclu30 yen:
una primera válvula de accionamiento (T1A) que está adaptada para acoplar el citado primer terminal (80) a un extremo del devanado (WA) , y
una segunda válvula de accionamiento (T2A) en serie con un segundo sensor de corriente (S2A) , estando acoplados la citada segunda válvula de accionamiento (T2A) y el citado segundo sensor de corriente (S2A) entre el 35 otro extremo del devanado (WA) y el citado segundo terminal (90) .
3. El circuito de control de acuerdo con la reivindicación 2, en el que la citada conexión en serie de la citada válvula de prueba (T3A, T3B, T3C) y el citado sensor de corriente de prueba (S3A, S3B, S3C) están conectados en paralelo con la citada conexión en serie del citado segundo transistor de accionamiento (T2A) y el citado segundo sensor de corriente (S2A) .
4. El circuito de control de acuerdo con la reivindicación 1, que comprende además:
un sensor Hall (SWA) conectado en serie con el devanado (WA) para medir la citada corriente de accionamiento o para determinar cualesquiera flujos de corriente a través del devanado (WA) .
5. El circuito de control de acuerdo con la reivindicación 1, en el que el citado segundo valor máximo es el 5 por ciento del valor máximo de la corriente de accionamiento (iWmax) .
6. El circuito de control de acuerdo con cualquiera de las reivindicaciones 1 a 5, que se caracteriza porque el citado sensor de corriente de prueba (S3A) tiene una resistencia, siendo seleccionada la citada resistencia de tal manera que la relación entre la resistencia en el sensor de corriente de prueba y la resistencia en el devanado correspondiente (WA) sea mayor que 1/2.
7. El circuito de control de acuerdo con la reivindicación 6, que se caracteriza porque
la resistencia en el sensor de corriente de prueba (S3A) se selecciona de manera que la citada relación sea superior a 1/1.
8. El circuito de control de acuerdo con cualquiera de las reivindicaciones 1 a 7, que comprende, además:
un medio para establecer una velocidad de cambio de la corriente de prueba en respuesta al citado valor de tiempo y al citado valor de corriente; siendo indicativa la citada velocidad de cambio de la inductancia momentánea del devanado.
9. El circuito de control de acuerdo con la reivindicación 8, en el que:
el citado medio de establecimiento de posición está adaptado para establecer la citada posición mutua de10 pendiendo de la citada velocidad de cambio.
10. El circuito de control de acuerdo con cualquier reivindicación precedente, en el que
la relación entre el valor máximo de la corriente de accionamiento (iWmax) y el valor máximo de corriente de prueba (iprueba_max) es superior a 20.
11. Un procedimiento de funcionamiento de un circuito de control para una máquina de reluctancia que tiene dos
partes mutuamente amovibles, y al menos un devanado inductivo de fase (WA) adaptado para un cierto valor máximo de la corriente de accionamiento, en el que el circuito de control incluye un circuito en puente (85A) que tiene válvulas de accionamiento (T1A, T2A) , y una válvula de prueba (T3A) diferente de las citadas válvulas de accionamiento (T1A, T2A) , estando conectada en serie la válvula de prueba (T3A) con un sensor de corriente de prueba (S3A) ; comprendiendo el procedimiento los pasos de:
detectar si el devanado de fase se encuentra en un modo de accionamiento o en un modo de no accionamiento;
hacer que una corriente de prueba, que tiene un segundo valor máximo más bajo que el citado un cierto valor máximo, circule a través del devanado de fase (WA, WB, WC) y a través del citado sensor de corriente de prueba (S3A) cuando el devanado se encuentra en el modo de no accionamiento;
establecer una posición mutua que depende de la salida del citado sensor de corriente de prueba (S3A) ;
comprendiendo el procedimiento, además, los pasos de:
controlar la citada válvula de prueba (T3A, T3B, T3C) para hacer que la corriente de prueba circule a través del devanado y a través del citado sensor de corriente de prueba (S3A, S3B, S3C) durante el citado modo de no accionamiento;
y
controlar la citada válvula de prueba (T3A, T3B, T3C) para impedir que la citada corriente de accionamiento circule a través del sensor de corriente de prueba (S3A) durante el citado modo de funcionamiento.
12. El procedimiento de acuerdo con la reivindicación 11, que comprende, además, el paso de:
realizar la prueba, cuando el devanado de fase (WA) se encuentra en un modo de no accionamiento, si el devanado está inactivo.
13. El procedimiento de acuerdo con la reivindicación 12, en el que:
la prueba implica mediciones de niveles de voltaje en ambos extremos del devanado de fase (WA) utilizando una red de resistores de impedancia elevada conectada a un terminal de tierra (90) y a un terminal de polo 40 positivo de voltaje de CC (80) con el fin de proporcionar niveles de voltaje definidos en ambos extremos del devanado incluso cuando no circula corriente por el devanado.
14. El procedimiento de acuerdo con la reivindicación 11, que comprende, además, el paso de: establecer una velocidad de cambio de la corriente de prueba en respuesta a la citada salida del sensor de corriente; siendo indicativa la citada velocidad de cambio de la inductancia momentánea del devanado.
15. El procedimiento de acuerdo con la reivindicación 11, en el que el citado segundo valor máximo es el 5 por ciento del valor máximo de la corriente de accionamiento (iWmax) .
16. El procedimiento de acuerdo con cualquiera de las reivindicaciones 11 a 15, que se caracteriza por
medir el tiempo hasta que la citada corriente de prueba alcanza un cierto valor de corriente, o establecer un cambio en el valor de la corriente de prueba durante un tiempo determinado.
17. El procedimiento de acuerdo con cualquiera de las reivindicaciones 11 a 16, que comprende, además, el paso 5 de:
establecer una velocidad de cambio de la corriente de prueba en respuesta al citado valor de tiempo y al citado valor de corriente; siendo indicativa la citada velocidad de cambio de la inductancia momentánea del devanado.
18. El procedimiento de acuerdo con la reivindicación 17, en el que:
la citada posición mutua es establecida dependiendo de la citada velocidad de cambio.
19. El procedimiento de acuerdo con cualquiera de las reivindicaciones 11 a 18, que comprende, además, los pasos de:
controlar la corriente de accionamiento y la corriente de prueba de tal manera que la relación entre el valor máximo de la corriente de accionamiento y el valor máximo de la corriente de prueba sea mayor que 20.
Patentes similares o relacionadas:
MÁQUINA DE RELUCTANCIA CONMUTADA, del 24 de Octubre de 2019, de CENTRO DE INVESTIGACIONES ENERGÉTICAS, MEDIOAMBIENTALES Y TECNOLÓGICAS, O.A., M.P: Máquina de reluctancia conmutada. Siguiendo la configuración propuesta para el circuito magnético de la máquina de la presente invención, se reduce la cantidad de hierro […]
Método para sincronizar una máquina eléctrica de reluctancia síncrona, del 20 de Marzo de 2019, de KSB SE & Co. KGaA: Un método para sincronizar una máquina eléctrica de reluctancia síncrona en el que dicha máquina (E) no tiene sensores de tensión de magnetización […]
Conjunto aspirador con entrada a través de depósito extraíble, del 28 de Marzo de 2018, de SHOP VAC CORPORATION: Un conjunto aspirador que tiene: un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ; una manguera […]
 PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA, del 13 de Marzo de 2013, de YA HORNG ELECTRONIC CO. LTD.: Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia, que ofrece una unidad microcontroladora (UMC), que tiene una […]
PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA, del 13 de Marzo de 2013, de YA HORNG ELECTRONIC CO. LTD.: Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia, que ofrece una unidad microcontroladora (UMC), que tiene una […]
 Estimación de posición de rotor basada en resonancia, del 25 de Julio de 2012, de INVERTO NV: Sistema de prueba para una máquina de polos salientes , estando adaptado el sistema deprueba para generar una orden de pulso de prueba para aplicar un pulso […]
Estimación de posición de rotor basada en resonancia, del 25 de Julio de 2012, de INVERTO NV: Sistema de prueba para una máquina de polos salientes , estando adaptado el sistema deprueba para generar una orden de pulso de prueba para aplicar un pulso […]
CONVERTIDOR DE FRECUENCIA PARA UN MEDIDOR DE RELUCTANCIA CONECTADO Y SISTEMA MECATRÓNICO, del 5 de Diciembre de 2011, de MIELE & CIE. KG: Convertidor de frecuencia, que comprende un rectificador (B1) para generar o transformar una tensión alterna en el lado de la red (UN) en una tensión […]
PROCEDIMIENTO PARA REGULAR UN MOTOR DE RELUCTANCIA, del 20 de Junio de 2011, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento para regular un motor de reluctancia con un rotor y un estator , en donde el estator presenta bobinas de estator individuales y, según […]
 PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO, del 10 de Marzo de 2011, de RENAULT SAS: Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θptabla) de ángulo de conducción […]
PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO, del 10 de Marzo de 2011, de RENAULT SAS: Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θptabla) de ángulo de conducción […]