Determinación de la posición del rotor de una máquina eléctrica.
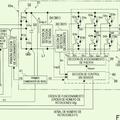
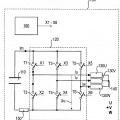
Convertidor de frecuencia (1), que comprende un puente de carga (2) y también un control (3) del puente de carga,
que suministra electricidad entre el puente de carga (2) y una máquina eléctrica (4) conectada al puente de carga; y el mencionado convertidor de frecuencia comprende una determinación (5) para la corriente y/o tensión de la máquina eléctrica antes mencionada, y dicho convertidor de frecuencia comprende una determinación (6) para la posición del rotor de la máquina eléctrica;
en donde un puente de carga (2) está dispuesto para suministrar una primera señal de excitación de tensión o corriente alterna (7) a la máquina eléctrica antes mencionada (4), dicha primera señal de excitación de tensión o corriente alterna se forma con relación al ángulo eléctrico (18) de la máquina eléctrica, y en donde el convertidor de frecuencia está dispuesto para determinar una primera señal de respuesta de corriente o tensión alterna (9, 16) correspondiente a la primera señal de excitación de tensión o corriente alterna mencionada anteriormente (7), y
en donde la posición del rotor se determina en función de la primera señal de respuesta de corriente o tensión alterna (9, 16),
caracterizado por que el puente de carga (2) está dispuesto para suministrar unas señales de excitación de tensión o corriente alterna primera (7) y segunda (8) a la mencionada máquina eléctrica (4), dichas señales de excitación de tensión o corriente alterna primera y segunda se forman con relación al ángulo eléctrico (18) de la máquina eléctrica y dichas señales de excitación de tensión o corriente alterna primera (7) y segunda (8) están dispuestas para estar en direcciones opuestas en su dirección de rotación, y por que la posición del rotor se determina en función de las señales de respuesta de corriente o tensión alterna primera (9, 16) y segunda (10,17) correspondientes a las señales de excitación de tensión o corriente alterna primera (7) y segunda (8) antes mencionadas, por lo que, como el desplazamiento de fase entre la primera señal de excitación de tensión o corriente alterna (7) y la primera señal de respuesta de corriente o tensión alterna (16) está en la dirección opuesta con respecto a la diferencia de fase entre la segunda señal de excitación de tensión o corriente alterna (8) y la segunda señal de respuesta de corriente o tensión alterna (17), se compensa la diferencia de fase entre las señales de respuesta de corriente o tensión alterna primera (16) y segunda (17),
en donde la posición del rotor de la máquina eléctrica se determina a partir de las señales de respuesta de corriente o tensión alterna primera y segunda de la siguiente manera: se miden las señales de respuesta de corriente o tensión alterna primera y segunda, y en función de las señales medidas, se determinan las amplitudes de las señales de respuesta de corriente o tensión alterna como una función Î(θ) de una referencia de ángulo eléctrico; se registran las amplitudes determinadas de las señales de respuesta de corriente o tensión alterna, en cuyo caso se forman gráficos (16, 17) de las amplitudes de las señales de respuesta de corriente o tensión alterna como una función de la referencia de ángulo eléctrico; se determina el valor del ángulo eléctrico correspondiente al valor máximo de la amplitud a partir de los gráficos de la amplitud de las señales de respuesta de corriente o tensión alterna primera (16) y segunda (17) de manera que se identifica el valor de la amplitud de la señal de respuesta de corriente o tensión alterna medida máxima, y se forma un ajuste de curva (27) mediante los puntos de medición del entorno del valor máximo, en donde después se resuelve el valor (25) del ángulo eléctrico correspondiente al valor máximo del ajuste de curva (27); el valor (25, 26) del ángulo eléctrico se resuelve por separado para los gráficos primero (16) y segundo (17) de las señales de respuesta de corriente o tensión alterna y el valor (28) del ángulo eléctrico que comprende la información de posición del rotor se determina como un valor promedio del valor (25) del ángulo eléctrico correspondiente al valor máximo del gráfico (16) de la amplitud de la primera señal de respuesta de corriente o tensión y el valor (26) del ángulo eléctrico correspondiente al valor máximo del gráfico (17) de la amplitud de la segunda señal de respuesta de corriente o tensión alterna.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2009/000043.
Solicitante: KONE CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KARTANONTIE 1 00330 HELSINKI FINLANDIA.
Inventor/es: KAUPPINEN,TUUKKA, STOLT,LAURI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B1/30 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 1/00 Sistemas de control de ascensores en general (dispositivos de seguridad B66B 5/00; control del funcionamiento de la puerta o barrera B66B 13/00). › que actúan sobre los órganos de accionamiento.
- H02P6/18 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
- H02P6/185 H02P 6/00 […] › que utilizan sensores de inductancia, p. ej. excitación por impulsos.
- H02P6/20 H02P 6/00 […] › Disposiciones para el arranque (H02P 6/08 tiene prioridad).
PDF original: ES-2677909_T3.pdf
Patentes similares o relacionadas:
Método y aparato para controlar un motor síncrono de imán permanente de un dispositivo de aire acondicionado, del 11 de Septiembre de 2019, de Hisense (Shandong) Air-conditioning Co., Ltd: Un dispositivo de aire acondicionado, que comprende: un módulo de almacenamiento de parámetros que almacena los parámetros iniciales del motor […]
Procedimiento de control implementado para controlar dos motores eléctricos síncronos de imán permanente conectados en paralelo, del 14 de Agosto de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de control implementado en un convertidor de potencia que comprende una salida conectada a dos motores (Mot1, Mot2) eléctricos […]
Método para calibrar un sistema de accionamiento, del 13 de Marzo de 2019, de Nidec Control Techniques Limited: Un método para calibrar un sistema de accionamiento, dicho sistema de accionamiento incluyendo un motor síncrono que comprende un rotor que incluye un imán […]
Conjunto aspirador con entrada a través de depósito extraíble, del 28 de Marzo de 2018, de SHOP VAC CORPORATION: Un conjunto aspirador que tiene: un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ; una manguera […]
 Dispositivo de reducción de consumo de energía, del 16 de Diciembre de 2015, de DAIKIN INDUSTRIES, LTD.: Un aparato de reducción de consumo de energía , que se proporciona en una unidad de interiores y/o una unidad de exteriores de un aparato de aire […]
Dispositivo de reducción de consumo de energía, del 16 de Diciembre de 2015, de DAIKIN INDUSTRIES, LTD.: Un aparato de reducción de consumo de energía , que se proporciona en una unidad de interiores y/o una unidad de exteriores de un aparato de aire […]
 Procedimiento y dispositivo para arrancar un motor eléctrico, del 6 de Agosto de 2014, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Procedimiento para el arranque de un motor eléctrico , que presenta un rotor, caracterizado por las etapas siguientes:
- accionamiento del rotor con un […]
Procedimiento y dispositivo para arrancar un motor eléctrico, del 6 de Agosto de 2014, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Procedimiento para el arranque de un motor eléctrico , que presenta un rotor, caracterizado por las etapas siguientes:
- accionamiento del rotor con un […]
Motor con convertidor AC, del 15 de Agosto de 2012, de BUGLAEV, OLEG ANATOLIEVICH (100.0%): Un motor eléctrico AC sin escobillas que está conectado a una fuente de alimentación y comprende un convertidor electromecánico con un devanado de tres secciones […]
ACCIONAMIENTO ELÉCTRICO, del 6 de Octubre de 2011, de SPAL AUTOMOTIVE S.R.L.: Accionamiento eléctrico que comprende: **Fórmula** - un motor sin escobillas y un puente de alimentación para alimentar el motor , cada […]